Группа изобретений относится к транспортному машиностроению и может быть использована для перемещения транспортных средств в любых средах.
Известен способ возбуждения механических колебаний, заключающийся во вращении уравновешенной или неуравновешенной массы и изменении скорости вращения, при этом частоту вращения модулируют частотой воспроизводимого диапазона. При модуляции скорости вращения массы частоту воспроизводимого колебания можно выбрать меньшей частоты вращения массы (аналог - а.с. СССР №982822, МКИ В 06 В 1/16, 1982).
Этот способ направлен на расширение частотного диапазона, но не позволяет использовать его для получения однонаправленных механических колебаний.
Известен способ возбуждения колебаний в вибрационной системе с одной степенью свободы, заключающийся в том, что на рабочий орган воздействуют импульсной силой, сдвинутой от периодической силы по фазе, с амплитудой не меньше амплитуды периодической силы, при этом частота действия импульсной силы кратна собственной частоте колебаний системы (аналог - а.с. СССР №1458022, МКИ В 06 В 1/16, 1989).
Этот способ расширяет эксплутационные возможности, но не может быть использован для получения однонаправленных механических колебаний.
Известен способ получения направленных механических колебаний, предусматривающий использование вращательного движения привода для переносного движения уравновешенной массы, выполненной с возможностью качения по внутренней поверхности криволинейной замкнутой траектории, размещенной в одной плоскости (прототип - Конструирование машин: Справочно-методическое пособие: в 2-х т. Т.1 / К.Ф. Фролов, А.Ф. Крайнев, Г.В. Крейнин и др. Под общей редакцией К.Ф. Фролова. - М.: Машиностроение, 1994 г., с. 343-344).
Данный способ также не может быть использован для получения направленных механических колебаний большой мощности.
Известен способ преобразования колебательного движения звена объекта в однонаправленное движение этого объекта, предусматривающий передачу вращения от привода на размещенный эксцентрично оси этого вращения промежуточный элемент в виде тела вращения, и передачу этого вращения на инерционные грузы, кинематически связанные с промежуточным элементом (аналог - а.с. СССР №1526842, МКИ В 06 В 1/16). При этом инерционные грузы также вращаются относительно оси вращения привода, что приводит к изменению их скорости вращения и координат центра масс, а направление результирующей силы от вращающихся масс остается постоянным.
Этот способ предназначен только для использования в наземных транспортных средствах, и позволяет получать незначительную результирующую силу.
Известен способ преобразования крутящего момента в силу, направленную в одну сторону, включающий вращение массы в плоскости вокруг центра, вращение этого центра вокруг оси ХУ с периодическим смещением его в заданную точку, линейное перемещение массы вдоль оси ХУ (аналог - патент Франции №2159081, МКИ F 03 G 3/00). В результате этих трех синхронных движений масса создает усилие, направленное в одну сторону.
Этот способ требует для своего осуществления перемещение центра масс жесткой связью вдоль оси, что усложняет перемещение элемента вместе с центром масс.
Известен способ получения тяги, предусматривающий вращение инерционных масс, которые используют для получения инерционно-центробежной силы в качестве опоры, служащей для отталкивания от нее машины и перемещения вдоль оси вращения, но в обратную сторону, причем массы наряду с круговым вращением получают осевое движение вдоль вала и за счет этого создают тягу (прототип - патент РФ №2146631, МКИ B 62 D 57/00, F 03 H 5/00, F 03 H 5/00, 2000).
К недостаткам этого способа можно отнести сложность используемого для осуществления способа устройства, требующего работы двух приводов, применение сложной кинематической схемы.
Известен способ преобразования энергии движения жидкой инерционной массы по замкнутой траектории в энергию непрерывного линейного перемещения, используемого для поступательного движения устройства или статического нагружения других объектов, при этом распределяют эту массу в процессе движения таким образом, что инерционная масса в любой момент времени присутствует в любой точке траектории, но при этом ее величина на разных участках траектории неодинакова, вследствие чего результирующая сила инерции имеет постоянную величину и направление (аналог - заявка РФ №92007694).
Известен способ осуществления направленного движения самоходных систем, предусматривающий передачу вращения от двигателя к инерционно-импульсному механизму, содержащему два параллельных вала с дисбалансами, выполненных с возможностью вращения в противоположные стороны в плоскости вращения дебалансов, перпендикулярной направлению движения системы, при этом обеспечивают возможность качания рамы, несущей инерционно-импульсный механизм, в плоскости направления движения системы (прототип - а.с. СССР №151574, кл. 63 с 29/06, 1962).
Этот способ обеспечивает строго направленное движение, но без отрыва опорной поверхности от твердой поверхности (от грунта).
Известен импульсный движитель, содержащий корпус, расположенный в нем приводной вал, закрепленный на нем ведущий диск, шарнирно установленные на последнем штоки с закрепленными на них инерционными грузами и механизм ориентации грузов, выполненный в виде ведомого диска, установленного на корпусе с возможностью поворота эксцентрично оси вращения приводного вала, причем штоки выполнены в виде шарнирно установленных соответственно поводков на ведущем диске и рычагов на ведомом диске, каждый из рычагов одним из концов шарнирно связан с поводком, а другим концом связан с инерционным грузом (аналог - а.с. СССР №1526842, МКИ В 06 B 1/16, 1989).
В этом устройстве из-за наличия нескольких инерционных грузов при их вращении трудно поддерживать заданное направление результирующей силы.
Известно устройство для возбуждения механических колебаний, содержащее корпус с беговой дорожкой на внутренней поверхности с переменным радиусом кривизны, приводной вал, приводной механизм, установленный на приводном валу, и инерционный элемент, взаимодействующий с внутренней поверхностью беговой дорожки и подвижно соединенный с приводным механизмом (аналог - Конструирование машин: Справочно-методическое пособие: в 2-х т. Т.1 / К.Ф. Фролов, А.Ф. Крайнев, Г.В. Крейнин и др. Под общей редакцией К.Ф. Фролова. - М.: Машиностроение, 1994 г., с. 343-344).
Это устройство не может обеспечить получение возмущающей силы большой величины из-за малого значения эксцентриситета.
Известен вибровозбудитель, содержащий корпус с беговой дорожкой на внутренней поверхности с переменным радиусом кривизны и выступами на внешней поверхности, водило с вилкой, два инерционных бегунка, один их которых размещен на внутренней поверхности, а другой - на внешней поверхности беговой дорожки, причем оси бегунков размещены внутри вилки и соединены между собой пружиной (прототип - а.с. СССР №1351697, В 06 B 1/16).
В этом вибровозбудителе для автоматического прижатия внутреннего инерционного бегунка к беговой дорожке используют и внешний бегунок, который подвергается большим резко меняющимся нагрузкам на ось, что может привести к разрушению как оси, так и самого бегунка.
Известен движитель инерционно-реактивного действия, содержащий корпус, вал и прямые рычаги с массами, предназначенными для кругового движения, толкающий механизм с регулируемым приводом и опорными кольцами, ступицу, которая соединена с валом и к которой шарнирно прикреплены упомянутые прямые рычаги с массами, а также эксцентрики, посаженные на валики, позволяющие проводить поочередные наклоны указанных рычагов с массами так, что массы наряду с круговым движением получают осевое движение вдоль вала (аналог - патент РФ №2146631, МКИ В 62 D 57/00, F 03 G 3/00, 2000).
Это изобретение направлено на уменьшение веса и габаритов, но его использование не позволяет изменять направление движения.
Известен инерционно-импульсный движитель, содержащий корпус, дебалансы, закрепленные на одних концах подвижных штанг, размещенных в радиальных направляющих, связанных с приводным валом, установленным в корпусе, при этом дебалансы снабжены элементами качения, взаимодействующими с дугообразными с уступом копирами, дуга которых эксцентрична относительно оси вращения вала, а на штангах между дебалансами и направляющими установлены пружины сжатия (аналог - патент РФ №2051832, МКИ В 62 D 57/00, 1996).
Этот движитель направлен на устранение ударов дебалансов по направляющим при их нахождении в точке начала уступа копира и уменьшении длины тяг, но в нем отсутствуют средства для изменения направления перемещения.
Известно устройство для создания инерционных одинаковых по величине импульсов в заданном координатном направлении за счет вращения закрепленной на оси, установленной на основании, неуравновешенной массы, содержащее основание с прикрепленной к нему двигателем с двухсторонним выходным валом, на одном из концов которого закреплен неуравновешенный груз, вращающуюся платформу, установленную на оси, проходящей через центр основания, при этом на основании закреплена перпендикулярно и соосно с осью платформы коническая шестерня, двигатель установлен на платформе, неуравновешенный груз закреплен на внутреннем конце вала двигателя, а на его наружном конце установлена перпендикулярно первой шестерне и взаимодействующая с ней вторая коническая шестерня (аналог - патент РФ №2083419, МКИ В 62 D 57/00, 1997).
Это устройство направлено на повышение эксплутационных возможностей и расширение области применения, но имеет сложную конструкцию и в нем отсутствуют средства для изменения направления движения.
Известна силовая установка, содержащая барабан с отверстиями, расположенными диаметрально противоположно, в которых размещены передвигающиеся грузы, снабженные осевыми штоками, на каждом из которых имеется ролик, при этом барабан выполнен с возможностью вращения в цилиндрическом корпусе, причем ось барабана смещена относительно оси корпуса (аналог - патент Франции №2020488, МКИ F 03 G 3/00; В 63 Н 19/00, 1970).
Эта силовая установка может быть использована для перемещения транспортных средств за счет различия ходов, действующих преимущественно в одном направлении, получаемых при неодинаковом перемещении, по крайней мере, двух грузов, действующих диаметрально противоположно.
Известно приводное устройство для транспортных средств, содержащее роторы, выполненные с возможностью вращения вокруг оси, проходящей перпендикулярно к направлению движения; противолежащие маховые массы, выполненные с возможностью возвратно-поступательного перемещения в направлении оси вращения; направляющее устройство, состоящее из регулируемых гидравлических или пневматических цилиндров, установленных на роторах, подъемных устройств, которые соединены с каждой из маховых масс и выполнены с возможностью перемещения маховых масс в направлении радиуса к оси вращения и от нее, причем маховые массы выполнены с возможностью устанавливаться при каждом обороте ротора с помощью направляющих устройств эксцентрично оси вращения (аналог - заявка ФРГ №3423976, МКИ В 06 В 1/16; F 16 H 33/08, 1986).
Известно транспортное средство, содержащее раму и инерционный привод, взаимодействующий с ведущими колесами, и выполнен из блока двигателей, роторы которых климатически связаны между собой посредством шестерен с дебалансами, смонтированных в общем корпусе, соединенном с рамой транспортного средства через пружину с рамой транспортного средства через пружину и с ведущими колесами при помощи храпового механизма, причем корпус свободно установлен на оси ведущих колес, на которой жестко закреплено храповое колесо (прототип - а.с. СССР №589150, МКИ В 62 D 57/00, 1978).
Это обеспечивает плавный ход транспортного средства.
Задача, на решение которой направлена группа заявляемых изобретений, заключается в повышении эффективности работы транспортных средств, достигаемой за счет увеличения значения возмущающей силы, действующей вдоль выбранного направления перемещения, за счет расширения функциональных возможностей сил инерции.
Эта задача решается тем, что в способе получения механических колебаний, предусматривающем обкатывание инерционным элементом эллиптической беговой дорожки с поджатием к ней этого элемента, движение инерционного элемента по беговой дорожке осуществляют относительно оси, совмещенной с одним из фокусов эллиптической траектории, выбранным в качестве главного, причем инерционный элемент используют сбалансированный.
Обкатывание инерционным элементом беговой дорожки можно производить как изнутри, так и снаружи.
Осуществление движения инерционного элемента по беговой дорожке относительно оси, совмещенной с одним из фокусов эллиптической траектории, выбранным в качестве главного, обеспечивает эксцентричность движения инерционного элемента в плоскости эллиптической траектории, что приводит к изменению величины возмущающей силы и преимущественному действию ее максимального значения вдоль длинной оси эллипса.
Использование сбалансированного инерционного элемента означает, что центр массы его сосредоточен на оси его же вращения - это облегчает получение максимального значения возмущающей силы вдоль главной оси эллиптической траектории в одном из направлений.
Осуществление обкатывания инерционным элементом беговой дорожки изнутри позволяет использовать для его прижатия дополнительно и силы инерции, действующие на жесткую связь (беговую дорожку).
Осуществление обкатывания инерционным элементом беговой дорожки снаружи позволяет воздействовать на упругую связь (например, в виде телескопического прижимного механизма).
Поставленная задача достигается и тем, что в известном способе преобразования направленных механических колебаний в однонаправленное прерывистое поступательное движение, предусматривающем взаимодействие между собой двух масс системы, одна из которых является инерционной, вращается вокруг своей оси, одновременно перемещается относительно другой массы по эллиптической траектории с упругим поджатием ее к беговой дорожке эллипса, сообщая системе направленные механические колебания, систему используют неуравновешенную с центром масс, совпадающим в статическом состоянии с центром тяжести этой же системы и с одним из фокусов эллипса, выбранного в качестве главного, и относительно которого производят эксцентричное перемещение сбалансированной массы, при этом в процессе движения систему ориентируют таким образом, чтобы длинная ось эллипса совпадала с требуемым направлением движения, а головная часть эллипса была направлена в сторону этого движения, а само движение системы осуществляют последовательными шаговыми перемещениями в моменты импульсного действия инерционных сил вдоль длинной оси эллипса максимальной по величине возмущающей силы, направленной от главного фокуса, в сторону движения.
В промежутках между последовательными шаговыми перемещениями в заданном направлении систему можно перемещать дополнительно и по инерции, при этом движение по инерции производят в момент совпадения центра масс с главным фокусом.
Шаговое перемещение системы можно производить поступательно-возвратно, при этом шаг перемещения в заданном прямом направлении больше шага в обратном направлении.
Использование неуравновешенной системы обуславливает возможность движения ее в каком-либо направлении.
Использование системы с центром масс, совпадающим в статическом состоянии с центром тяжести этой же системы и с одним из фокусов эллипса, выбранного в качестве главного, и относительно которого производят эксцентричное перемещение сбалансированной массы, позволяет в процессе осуществления движения системы перемещать центр масс по определенной (заданной) замкнутой траектории с возвратом этого центра обратно по завершении полного оборота сбалансированной массы в главный фокус, уже находящийся в другой точке траектории движения.
Ориентирование системы в процессе движения таким образом, чтобы длинная ось эллипса совпадала с требуемым направлением движения, а головная часть эллипса была направлена в сторону этого движения, обеспечивает возможность использования максимальных по величине возмущающих сил.
Осуществление движения системы последовательными шаговыми перемещениями в моменты импульсного действия вдоль длинной оси максимальной по величине возмущающей силы, направленной от главного фокуса в сторону движения, обеспечивает поступательность движения системы в целом, несмотря на дискретный характер перемещения в требуемом направлении.
Перемещение системы в промежутках между последовательными шаговыми перемещениями в заданном направлении дополнительно и по инерции позволяет использовать в полной мере возможности движения в заданном направлении.
Осуществление движения по инерции в момент совпадения центра масс с главным фокусом дает начало новому циклу движения.
Осуществление шагового перемещения системы поступательно-возвратно с возможностью задания шага перемещения в прямом направлении больше шага в обратном направлении дает возможность обеспечения движения в заданном направлении.
Задача решается и тем, что в способе управляемого перемещения транспортного средства в пространстве в заданном направлении, предусматривающем использование для получения тяги двигателя, вырабатывающего импульсы инерционных сил, управляемое перемещение в заданном направлении транспортного средства производят путем совмещения с этим направлением равнодействующей системы сил, полученной от использования по меньшей мере, более одного движителя, распределенных определенным образом относительно друг друга и относительно основания транспортного средства.
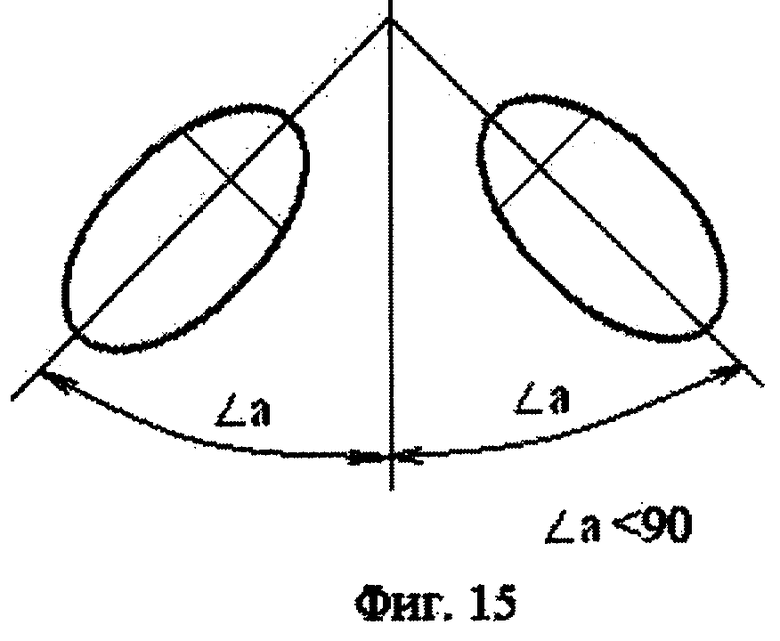
Режим работы транспортного средства в заданном направлении можно создать синхронным и симметричным наклоном в плоскости движителей большой оси эллипса каждого из движителей относительно линии, на которой размещают центр тяжести и центр масс транспортного средства.
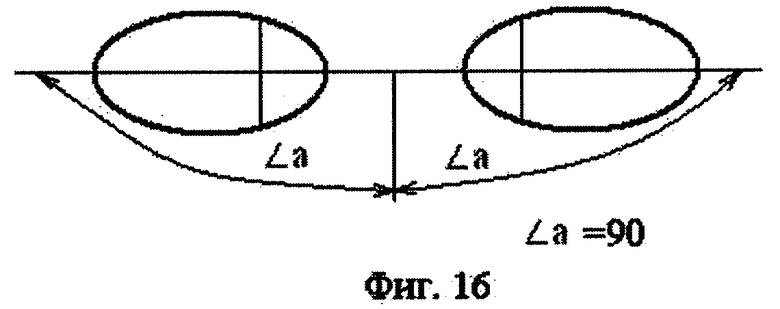
Движение вперед или подъем можно создать под углом, меньшим 90°, движение в режиме планирования или зависания - под углом, равным 90°, а движение назад или при посадке на опорную поверхность - под углом, противоположным углу подъема.
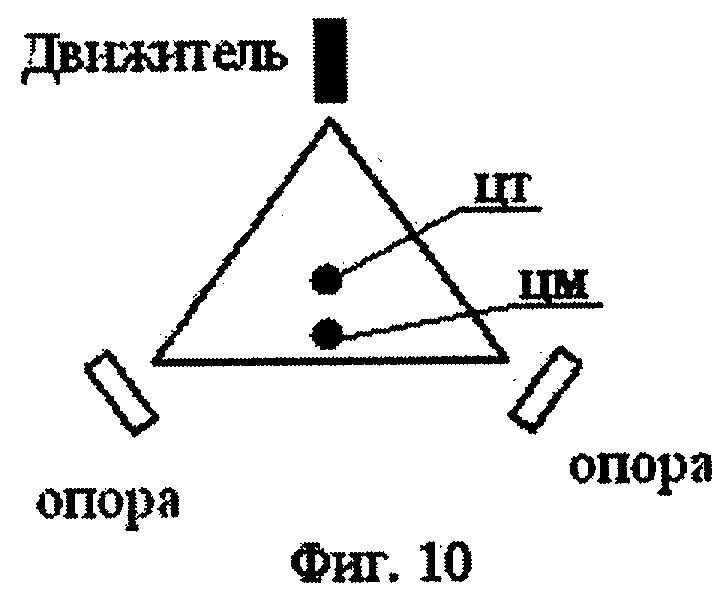
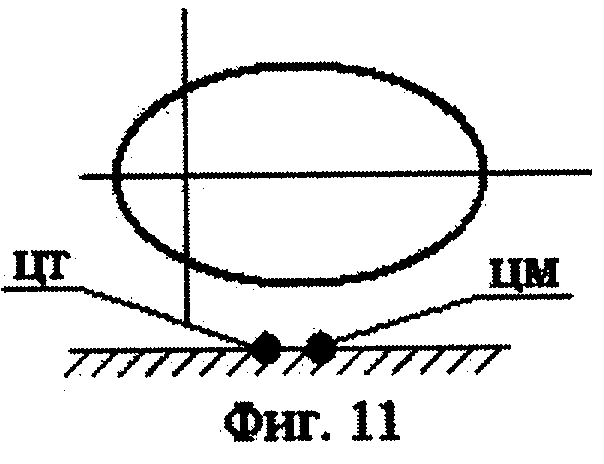
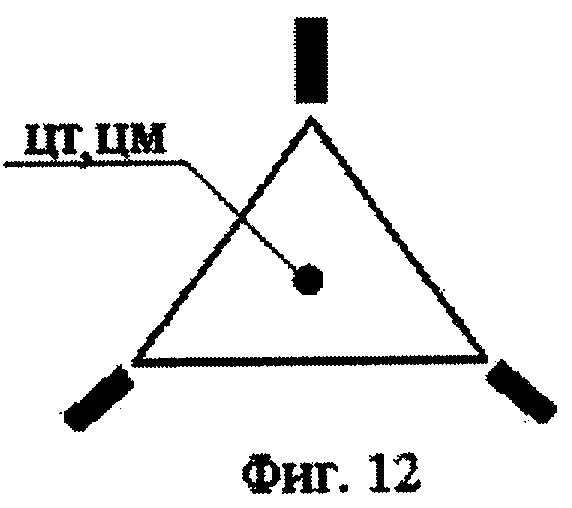
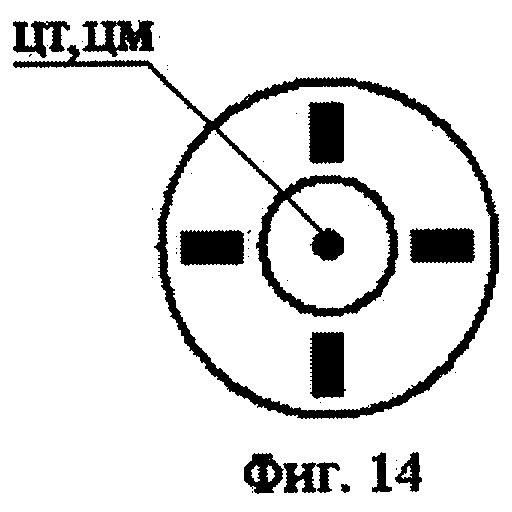
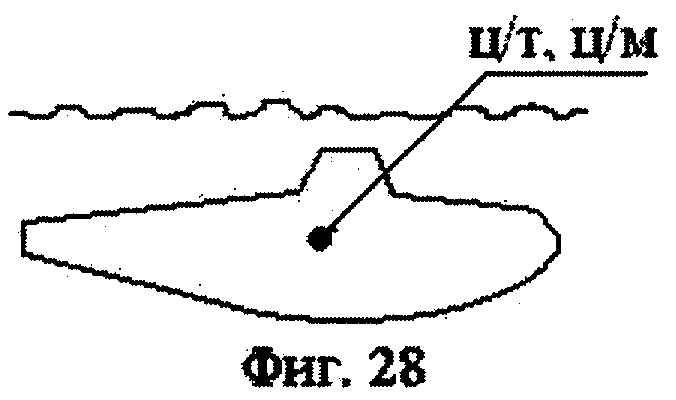
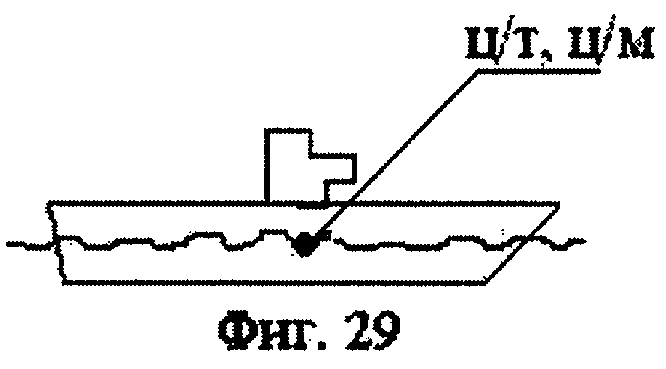
Устойчивость транспортного средства в пространстве можно задавать размещением модулей относительно друг друга с совмещением или раздельным расположением центра тяжести и центра масс транспортного средства, при этом можно задавать эту устойчивость с частичным опиранием на среду, причем устойчивость в водной среде можно создавать размещением движителя в одной из вершин равнобедренного треугольника, образующего контур транспортного средства, на опорной поверхности - параллельным размещением большой оси эллипса движителя относительно этой поверхности, в воздухе - размещением движителей в вершинах равнобедренного треугольника, образующего контур транспортного средства, в космосе - размещением движителей на кольце в радиальном направлении, а центры тяжести и центры масс можно располагать: в первом случае - внутри контура, во втором - на опоре транспортного средства, в третьем - за пределами контура, в четвертом - внутри круга, концентричного с кольцом и расположенного внутри кольца и соосно с транспортным средством, контур которого ограничен внешней окружностью кольца.
Осуществление перемещения транспортного средства в заданном направлении путем совмещения с этим направлением равнодействующей системы сил, полученных от использования, по меньшей мере, более одного движителя, распределенных определенным образом относительно друг друга и относительно основания транспортного средства позволяет получить легкую управляемость транспортным средством, основанную на оптимальной компоновке.
Совместная и одновременная работа движителей обеспечивает начальные условия для повышения управляемости транспортного средства.
Размещение плоскости каждого из движителей в плоскости, перпендикулярной основанию транспортного средства, позволяет задавать вектор тяги.
Создание режима работы транспортного средства в заданном направлении синхронным и симметричным наклоном в плоскости движителей большой оси эллипса каждого из движителей относительно линии, на которой размещают центр тяжести и центр масс транспортного средства (в статическом состоянии) позволяет осуществить перемещение центра масс по требуемой замкнутой кривой и, тем самым, перемещение в целом движителя.
Создание движения вперед или подъем под углом, меньшим 90°, предусматривает использование максимального импульса инерционных сил и размещение центра масс каждого из движителей вместе с центрами тяжести инерционных масс в этих же движителях на геометрической оси каждого из движителей.
Создание движения в режиме планирования или зависания под углом, равным 90°, предусматривает использование максимальных импульсов инерционных сил, направленных навстречу друг другу, при этом центры тяжести движителей инерционных масс и центры масс движителей находятся на геометрической оси, пересекающей под прямым углом геометрическую ось движителя.
Создание движения при посадке на опорную поверхность под углом, противоположным углу подъема, предусматривает расположение центров тяжести движителей и инерционных масс в них, а также центров масс движителей на геометрических осях движителей, расположенных под углом к геометрической оси, противоположным углу подъема.
Задание устойчивости транспортного средства в пространстве размещением движителей относительно друг друга с совмещением или раздельным расположением центра тяжести (ЦТ) и центра масс (ЦМ) транспортного средства обеспечивает учет окружающей среды.
Задание устойчивости транспортного средства в пространстве с частичным опиранием на среду позволяет использовать свойства этой среды (плотность).
Создание устойчивости транспортного средства в водной среде размещением движителя в одной из вершин равностороннего треугольника, образующего контур транспортного средства, дает возможность использования тяговых усилий каждого из движителей и размещения опор в других вершинах, а расположение центров тяжести и масс внутри этого контура усиливает устойчивость транспортного средства в целом.
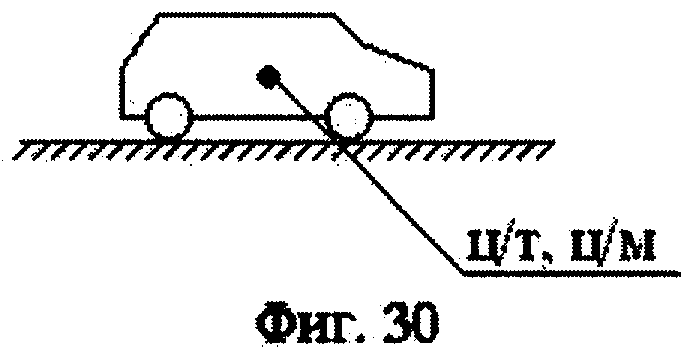
Создание устойчивости транспортного средства на опорной поверхности параллельным размещением большой оси эллипса движителя относительно этой поверхности дает возможность использования тягового усилия движителя в направленном движении, а расположение центров тяжести и масс на опоре движителя обеспечивает устойчивость транспортного средства.
Поставленная задача решается также тем, что в устройстве для получения направленных механических колебаний, содержащем корпус с беговой дорожкой эллиптической формы, инерционный элемент, выполненный с возможностью обкатывания беговой дорожки и вращения вокруг своей оси, и приводной механизм, ось переносного движения инерционного элемента размещена в одном из фокусов эллиптической траектории, выбранного в качестве главного, и совмещена с осью вала двигателя привода, а приводной механизм содержит узел принудительного поджатия инерционного элемента к беговой дорожке.
Инерционный элемент может быть размещен внутри корпуса, приводной механизм может быть выполнен рычажно-пружинным, а узел принудительного поджатия может содержать кинематическую пару, одно из звеньев которой является упругим и выполнено в виде пружины сжатия.
Приводной механизм может быть выполнен из двух плоскопараллельных частей, каждая из которых содержит: водило, шарнир, поводок и узел принудительного поджатия инерционного элемента к внутренней поверхности корпуса.
Каждое из водил может быть снабжено полуосями, размещенными симметрично снаружи корпуса, причем полуось одного водила закреплена на валу двигателя, полуось другого водила установлена в подшипниковом стакане, а геометрические оси этих полуосей совпадают с осью вала.
Узел принудительного поджатия инерционного элемента к внутренней поверхности корпуса может содержать консольный рычаг, размещенный одним концом в шарнире, и упругое звено, закрепленное на другом конце рычага и соединяющее его с водилом, при этом сам узел может быть выполнен с возможностью изменения как длины упругого звена, так и изменения угла между водилом и консольным рычагом при обкатывании инерционным элементом внутренней поверхности корпуса, причем длина упругого звена и угол между водилом и консольным рычагом при нахождении оси инерционного элемента в главном фокусе эллипса являются максимальными, а при нахождении этой оси в другом фокусе - минимальными.
Устройство может быть выполнено с возможностью совместной работы с аналогичным устройством, при этом оба устройства размещают относительно друг друга таким образом, чтобы их корпуса были в параллельных плоскостях, а главные фокусы эллипсов совпадали, причем приводные механизмы обоих устройств выполнены с возможностью синхронного перемещения инерционных элементов в противоположных направлениях.
Инерционный элемент может быть размещен снаружи корпуса, приводной механизм выполнен телескопически-пружинным, а узел принудительного поджатия содержит упругое звено, выполненное в виде пружины растяжения.
Корпус может быть выполнен с направляющими для инерционного элемента.
Размещение оси переносного движения инерционного элемента в одном из фокусов эллипса и совмещение ее с осью вала двигателя позволяет инерционному элементу при его обкатывании внутренней поверхности корпуса то приближаться, то удаляться от этого фокуса с соответствующим изменением направления и величины возмущающей силы, а выполнение приводного механизма с возможностью принудительного поджатия инерционного элемента к беговой дорожке обеспечивает постоянный фрикционный контакт поверхностей инерционного элемента и корпуса.
Размещение инерционного элемента внутри корпуса делает устройство компактным, выполнение приводного механизма рычажно-пружинным обеспечивает преобразование вращательного движения приводного вала в движение инерционного элемента относительно беговой дорожки, а выполнение узла принудительного поджатия с кинематической парой, одно из звеньев которого является упругим и выполнено в виде пружины сжатия, обеспечивает безотрывный контакт поверхностей инерционного элемента и беговой дорожки.
Выполнение приводного механизма из двух плоскопараллельных частей, каждая из которых содержит водило, шарнир, поводок и узел принудительного поджатия инерционного элемента к внутренней поверхности корпуса, обеспечивает безотрывное перемещение инерционного элемента по эллиптической траектории и в одной плоскости.
Снабжение каждого из водил полуосями, размещенными симметрично снаружи корпуса, обеспечивает устойчивость перемещения инерционного элемента в плоскости эллипса, закрепление же полуоси одного водила на валу двигателя и установка полуоси другого водила в подшипниковом узле позволяет удерживать общую геометрическую ось неизменной в пространстве, а совпадение геометрической оси этих полуосей с осью вала дает возможность получать угловую скорость вращения инерционного элемента по величине большую, чем в любом другом месте нахождения этого элемента.
Наличие в узле принудительного поджатия инерционного элемента к внутренней поверхности корпуса консольного рычага, одним концом размещенного в шарнире, и упругого звена, закрепленного на другом конце рычага и соединяющего его с водилом, позволяет получить кинематическую связь, обеспечивающую изменение геометрических параметров по заданному расчету.
Выполнение узла с возможностью изменения как длины упругого звена, так и изменения угла между водилом и консольным рычагом при обкатывании инерционным элементом внутренней поверхности корпуса обеспечивает требуемое усилие прижима этого элемента к внутренней поверхности корпуса.
Установление длины упругого звена и угла между водилом и консольным рычагом максимальными при нахождении оси инерционного элемента в главном фокусе эллипса ограничивает в начальный момент движение инерционного элемента реакцией связи, а установление этих же величин минимальными при нахождении оси инерционного элемента в другом фокусе позволяет использовать "развернутую" длину и ограничение для получения максимальной возбуждающей силы вдоль главной оси эллипса.
Размещение инерционного элемента снаружи корпуса позволяет использовать сопротивление реакции жесткой (для возбуждения центростремительной силы (ЦСС)) связи, выполнение приводного механизма телескопическим позволяет производить перемещение инерционного элемента вместе с центром масс устройства, а выполнение узла принудительного поджатия с упругим звеном, выполненным в виде пружины разжатия, обеспечивает безотрывный контакт поверхностей инерционного элемента и беговой дорожки.
Выполнение устройства с возможностью совместной работы с аналогичным устройством позволяет получить повышенную возбуждающую силу; размещение этих устройств относительно друг друга таким образом, чтобы их корпуса были в параллельных плоскостях, а главные фокусы эллипсов совпадали, обеспечивает условия для одновременной их работы; выполнение же приводных механизмов обоих устройств с возможностью синхронного перемещения инерционных элементов в противоположных направлениях позволяет устранить влияние кориолисовых сил, действующих на каждый из этих элементов и сохранить устойчивость оси центра тяжести относительно ее направления.
Выполнение корпуса с направляющими для инерционного элемента обеспечивает перемещение этого инерционного элемента в одной плоскости без бокового смещения.
Эта задача решается также тем, что в движителе, содержащем корпус генератора направленных механических колебаний, жестко размещенных на раме, установленные на последней двигатель, привод, передающий вращение от вала двигателя к генератору, причем рама выполнена с возможностью размещения на основании транспортного средства, в качестве генератора направленных механических колебаний использовано устройство, выполненное в соответствии с п.18-25, корпус которого установлен в плоскости, перпендикулярной плоскости рамы, последняя снабжена шарниром, выполненным с возможностью изменения угла наклона длинной оси корпуса относительно плоскости основания в пределах от 0 до 180°, а также с возможностью поворота плоскости корпуса относительно исходного положения как влево, так и вправо в пределах от 0 до 45°, при этом связь рамы с основанием транспортного средства выполнена с возможностью демпфирования механических колебаний.
Использование в качестве устройства для получения направленных механических колебаний устройства, выполненного в соответствии с п.18-25, дает возможность получить перемещение транспортного средства в заданном направлении с использованием возможностей этой конструкции.
Размещение корпуса в плоскости, перпендикулярной плоскости рамы, обеспечивает условия для ориентации этой рамы относительно основания. Снабжение рамы шарниром обеспечивает возможность для перемещения транспортного средства без снабжения его средствами для изменения направления перемещения его основания, то есть в отсутствии средств управления.
Выполнение шарнира с возможностью изменения угла наклона длинной оси корпуса относительно плоскости основания в пределах от 0 до 180° обеспечивает возможность перемены направления движения с прямого на обратное в процессе движения.
Выполнение шарнира с возможностью поворота плоскости корпуса относительно исходного положения как влево, так и вправо в пределах от 0 до 45° обеспечивает возможность изменения траектории движения в выбранном направлении в процессе движения.
Выполнение связи рамы с основанием транспортного средства с возможностью демпфирования механических колебаний позволяет исключить их вредное влияние как на само транспортное средство, так и его пассажиров.
Предлагаемая группа изобретений иллюстрируется чертежами, на которых представлено:
Фиг.1 - схема получения механических колебаний при движении инерционного элемента по беговой дорожке внутри эллиптической траектории;
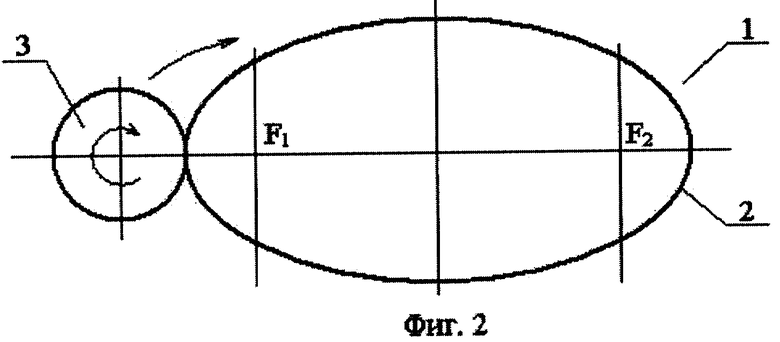
Фиг.2 - то же, но снаружи этой траектории;
Фиг.3 - схема взаимодействия инерционных масс;
Фиг.4 - то же, с изображением замкнутой кривой, описываемой центром масс;
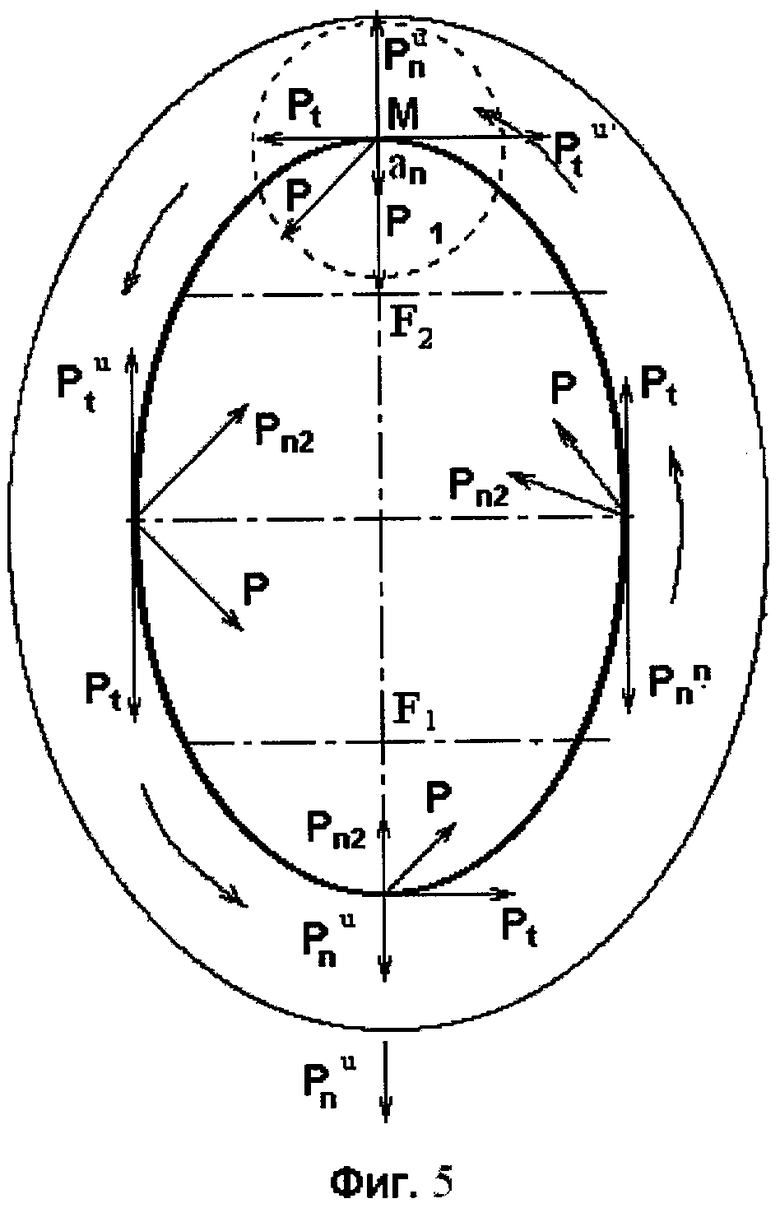
Фиг.5 - то же, со схемами действия сил при перемещении инерционной массы по заданной траектории;
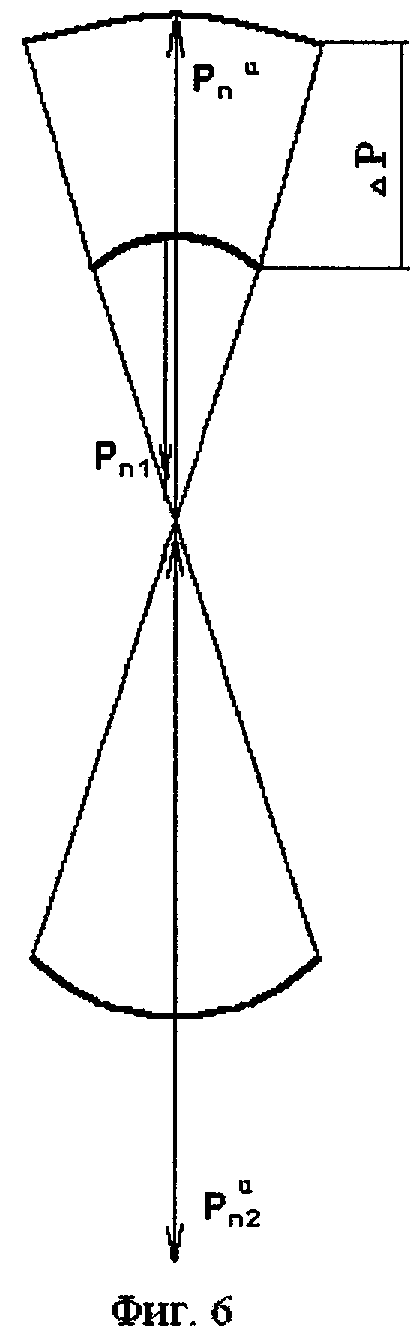
Фиг.6 - схема получения равнодействующей неуравновешенных сил инерции тяги;
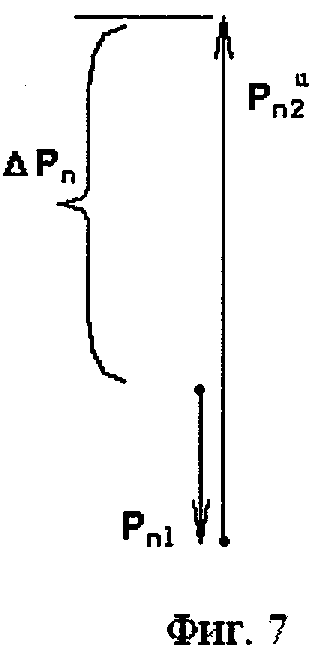
Фиг.7 - то же, с изображением расстояния перемещения системы независимых инерционных масс центростремительными силами;
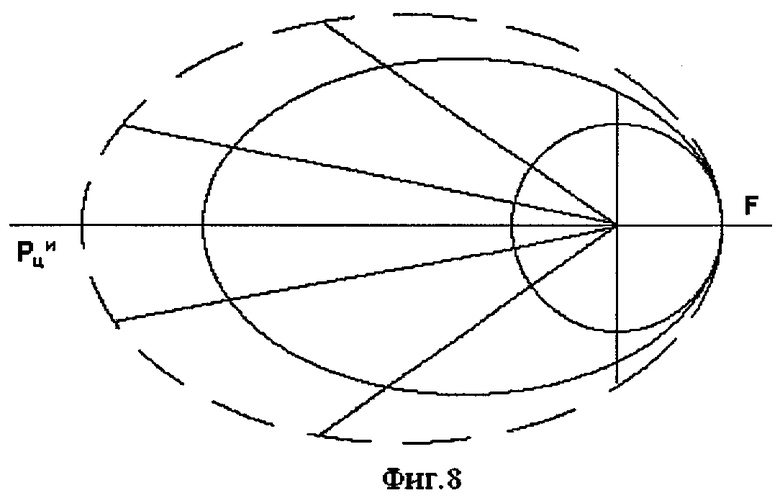
Фиг.8 - эпюра тяговых сил;
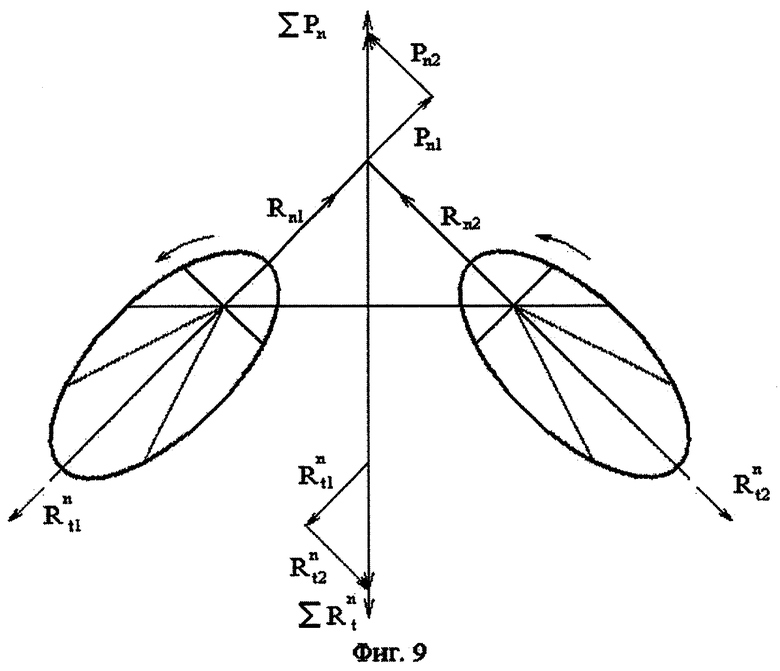
Фиг.9 - схема получения равнодействующей при работе двух движителей;
Фиг.10 - схема размещения движителя относительно контура подводного или надводного траспортного средства;
Фиг.11 - схема размещения движителя относительно твердой опорной поверхности;
Фиг.12 - схема размещения движителя относительно воздушного транспортного средства (самолет);
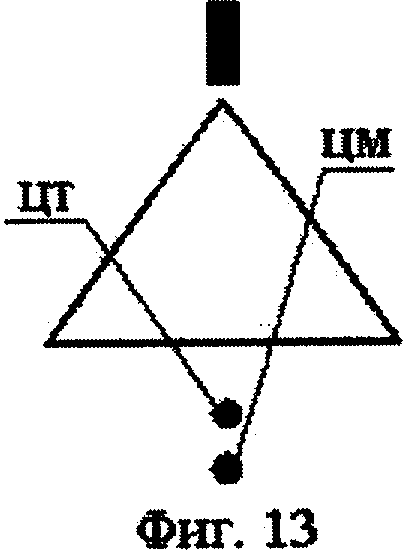
Фиг.13 - схема размещения движителя относительно воздушного транспортного средства (в виде орнитоптера);
Фиг.14 - схема размещения движителей относительно космического транспортного средства;
Фиг.15 - схема размещения движителей транспортного средства при его подъеме;
Фиг.16 - схема размещения движителей транспортного средства при его планировании;
Фиг.17 - схема размещения движителей транспортного средства при его спуске;
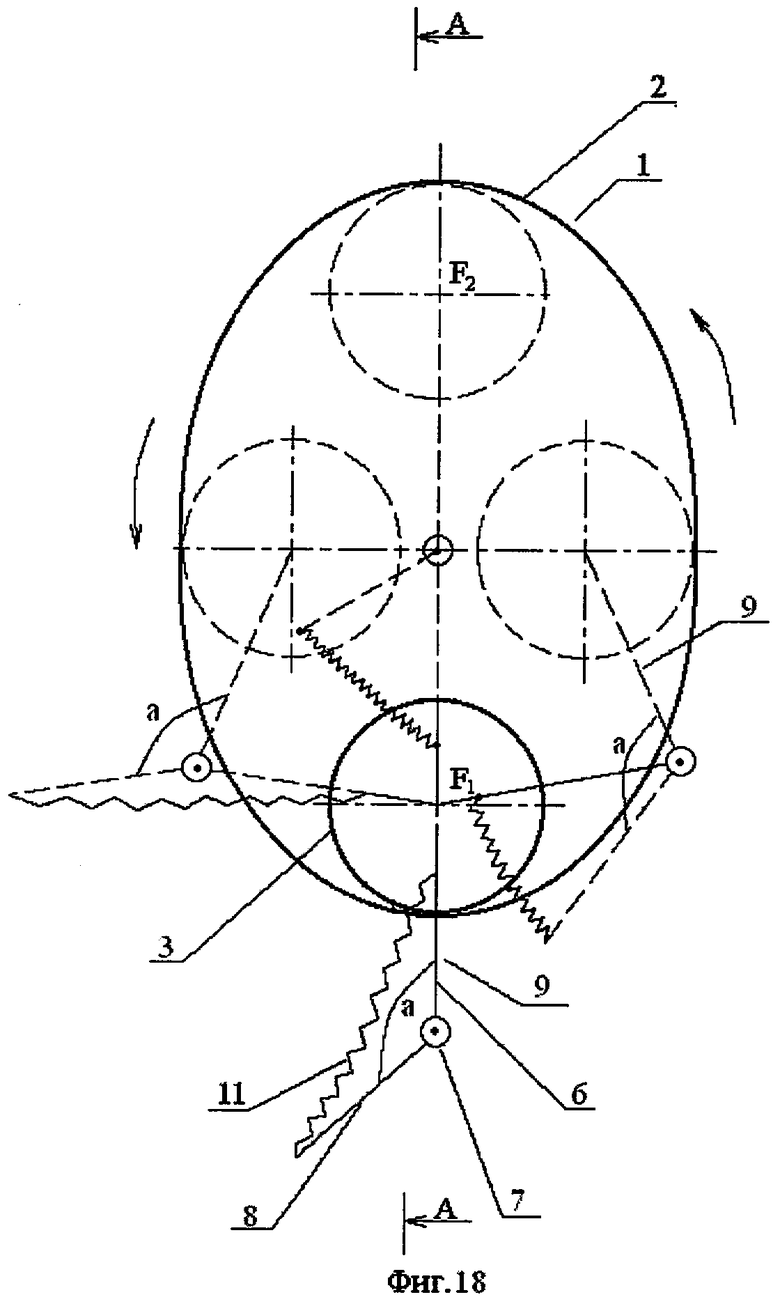
Фиг.18 - устройство с приводным рычажно-пружинным механизмом, вид сбоку;
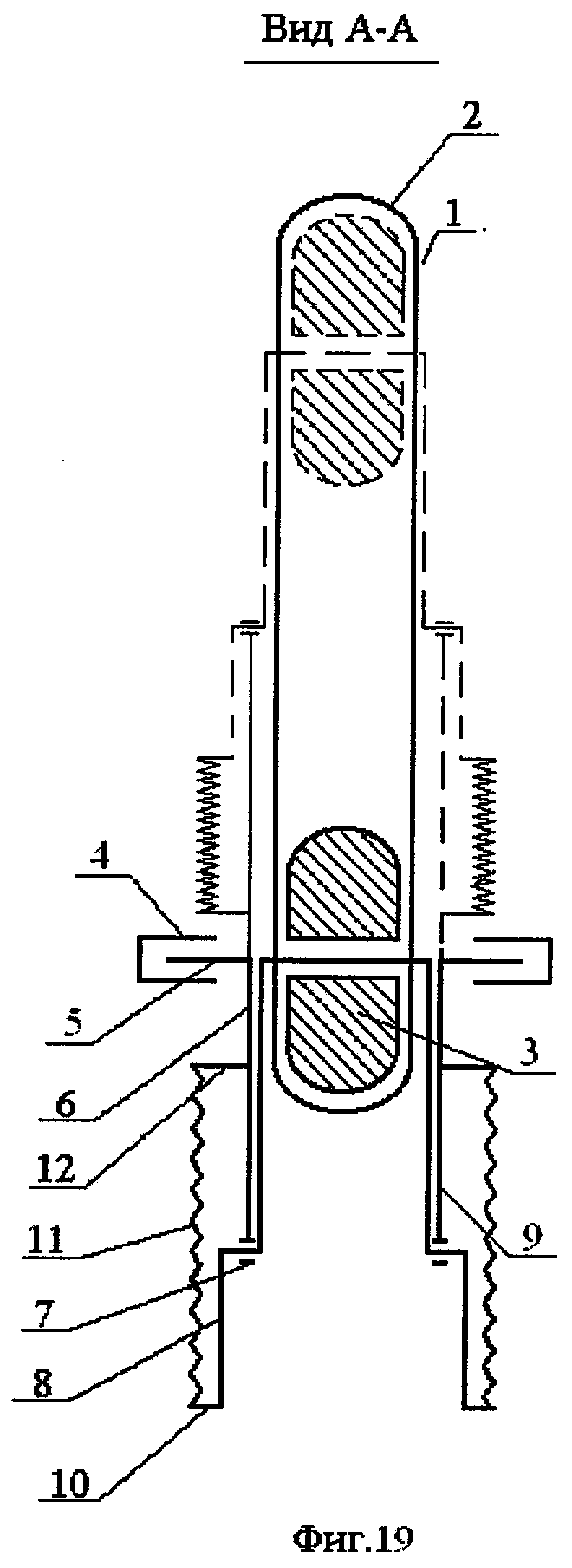
Фиг.19 - продольный разрез А-А на Фиг.18;
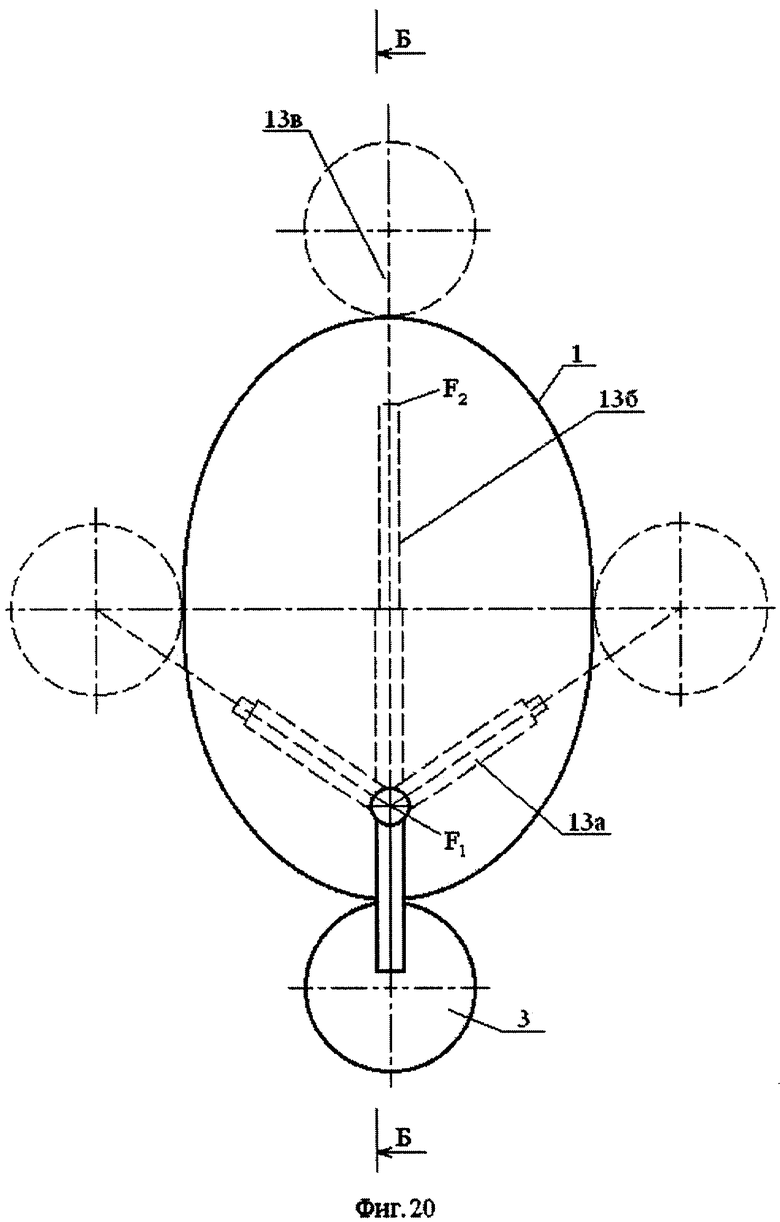
Фиг.20 - устройство с приводным телескопическим механизмом, вид сбоку;
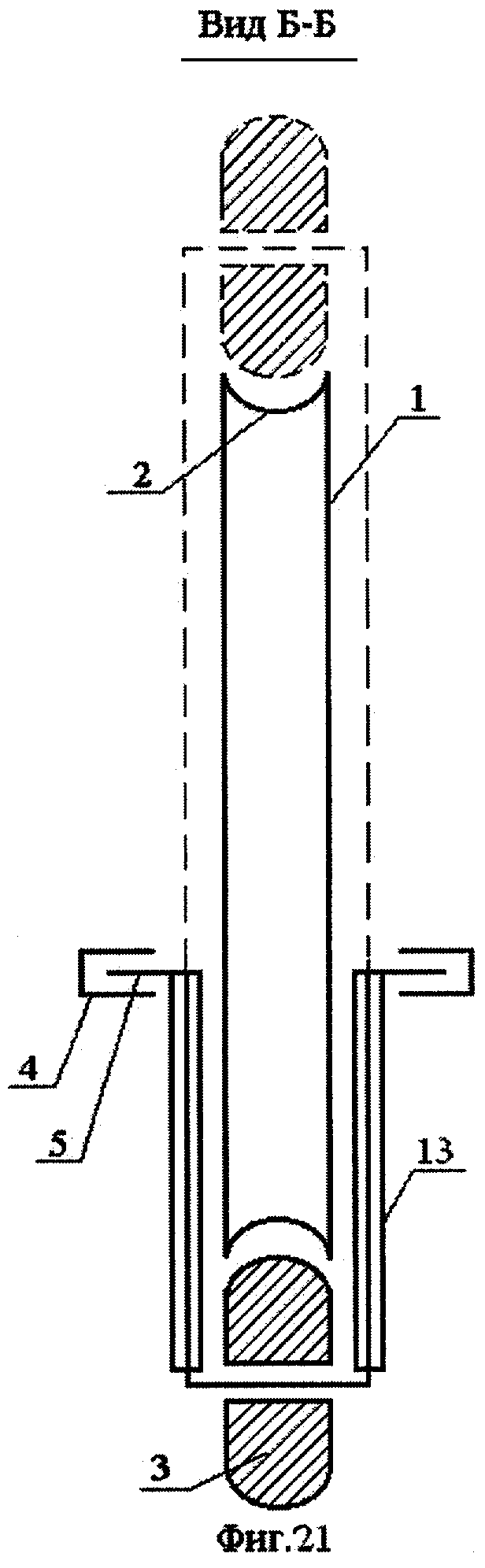
Фиг.21 - продольный разрез Б-Б на Фиг.20;
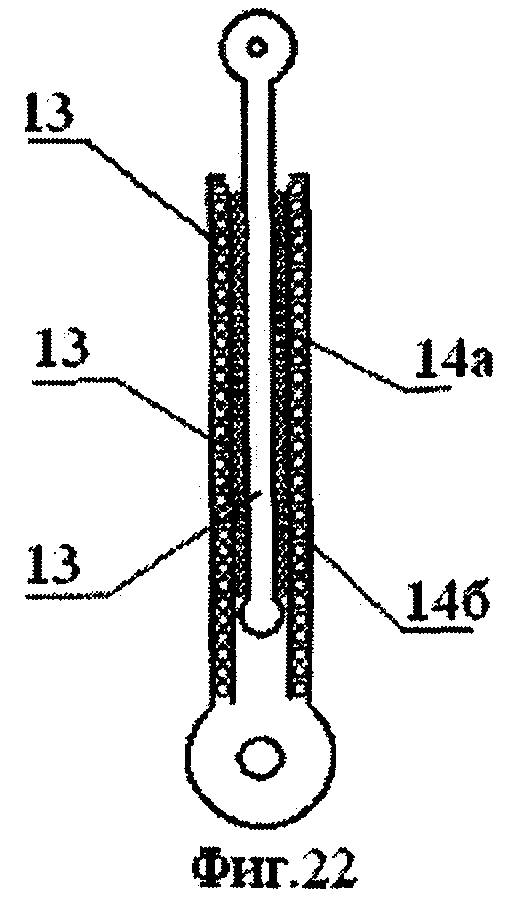
Фиг.22 - приводной телескопический механизм в сложенном состоянии, продольный разрез;
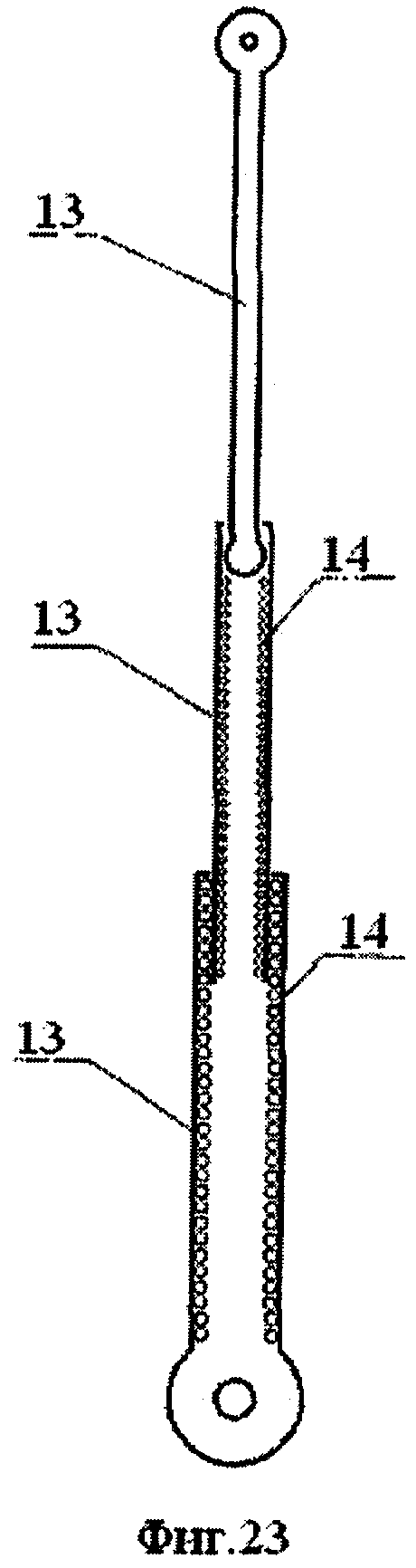
Фиг.23 - то же, в раздвинутом состоянии;
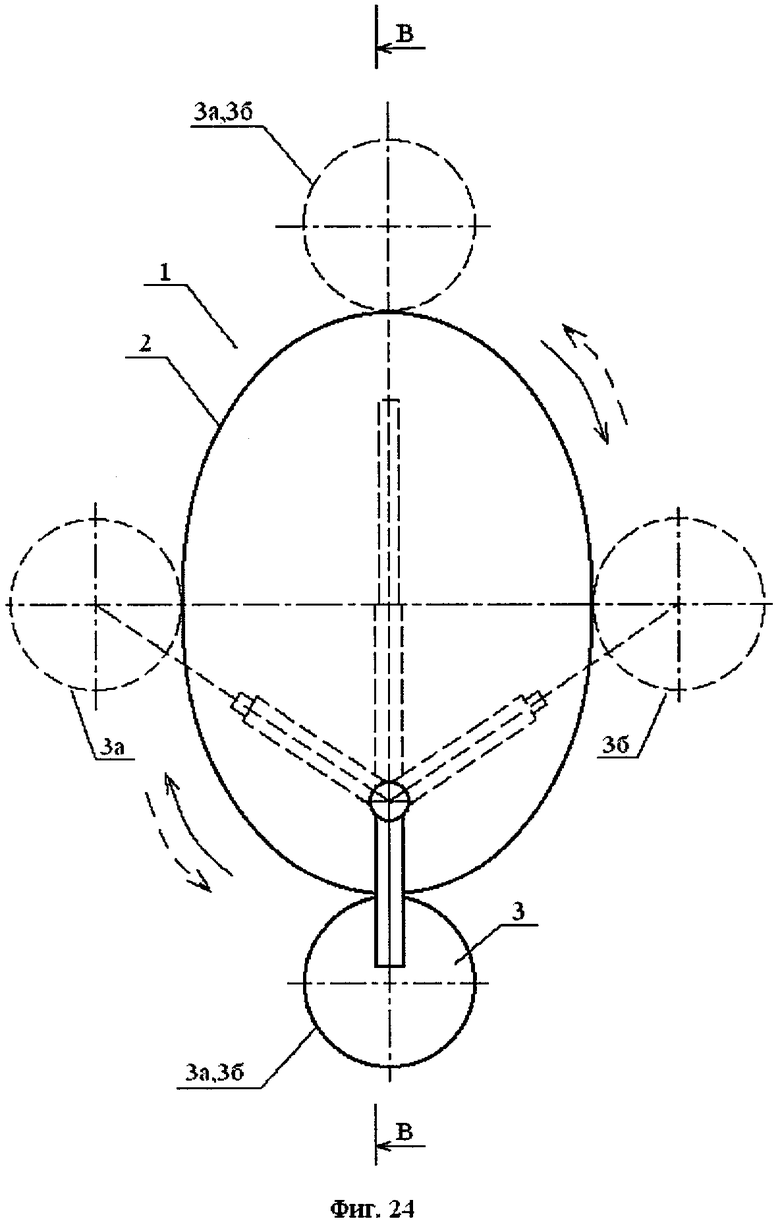
Фиг.24 - система из двух устройств с приводными телескопическими механизмами, вид сбоку;
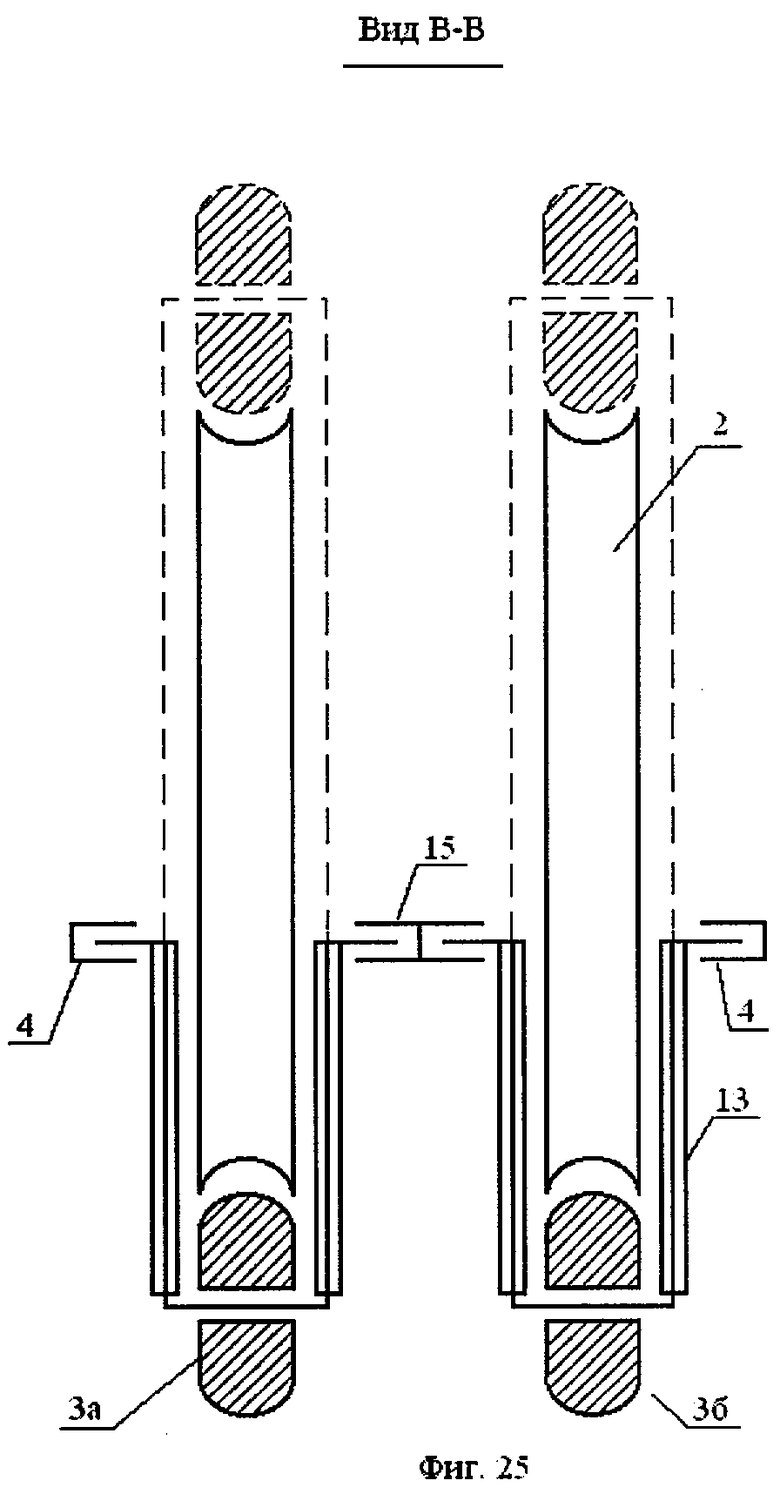
Фиг.25 - то же, продольный разрез В-В на Фиг.24;
Фиг.26 - движитель, вид сверху;
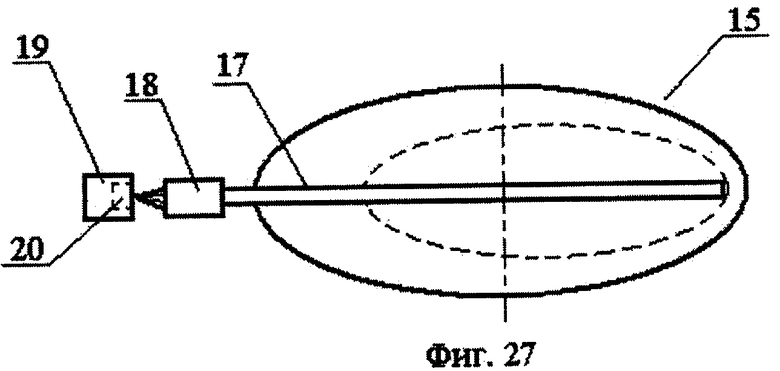
Фиг.27 - тоже, вид сбоку;
Фиг.28-35 - эксцентроидный двигатель транспортных средств, размещенный относительно точки ЦТ и ЦМ.
На Фиг.1 и 2 показана кинематическая пара, представленная двумя элементами, образующая одного из которых (беговой дорожки) представлена эллипсом 1, а другого (инерционного элемента) - окружностью, при этом движение окружности относительно эллипса 1 осуществляют с соприкосновением их поверхностей по линии, что возможно при выполнении эллипса в виде эллиптической беговой дорожки 2, а инерционного элемента 3 - в виде ротора. Эллипс, как известно, линия 2-го порядка, которую задают множеством точек плоскости, сумма расстояний которых до двух определенных точек F1 и F2 (фокусов эллипса) постоянна.
Способ получения направленных механических колебаний осуществляют следующим образом.
Включают приводной двигатель (не показан), обеспечивающий вращательное движение, которое через кинематическую приводную связь (не показана) подается на сбалансированный инерционный элемент 3, приводя его во вращение относительно точки, размещенной в центре массы этого элемента, и перекатывание (качение) его по внутренней или внешней стороне эллипса 1 с одновременным поджатием элемента 3 к внутренней или внешней стороне поверхности эллипса 1 беговой дорожки 2 за счет изменения длины связей, соединяющих этот элемент с приводом. Это сложное движение инерционного элемента осуществляют относительно общей оси, совмещенной с одним из фокусов, например, F1 эллипса, выбранного главным. Качение инерционного элемента производят по любому из двух вариантов.
По первому варианту в течение одного цикла (оборота) относительно фокуса F1 центр ротора в начальный момент совмещается с этим фокусом эллипса (Фиг.1), в момент качения описывает эллипс меньших размеров, а в конечный момент возвращается в этот же фокус.
По второму варианту в течение одного цикла (оборота) относительно фокуса F1 (Фиг.2) центр ротора в начальный момент удален от него на расстояние, равное длине отрезка от фокуса до края эллипса (вдоль длинной оси) плюс радиус инерционного элемента 3, в момент качения описывает эллипс больших размеров, а в конечный момент возвращается в указанную исходную точку.
В процессе качения геометрическая ось инерционного элемента смещается от фокуса F1 на расстояние, равное расстоянию между фокусами F1 и F2 эллипса 1 (в случае, когда инерционный элемент размещается внутри эллипса) или расстоянию, равному длине главной (длинной) оси эллипса плюс длина радиуса инерционного элемента.
Инерционный элемент 3, обкатывая изнутри эллипс 1 и вращаясь вокруг собственной оси (Фиг.1), дополнительно прижимается центробежной силой к этому эллипсу. По мере нарастания оборотов привода возникает инерция центробежной силы.
Инерционный элемент 3, обкатывая снаружи эллипс 1 и вращаясь вокруг собственной оси (Фиг.2), испытывая прижимающее усилие, также подвергается воздействию сил инерции, стремящихся оторвать его от эллипса.
При обкатывании происходит пространственное изменение расположения центра масс инерционного элемента с конечной траекторией в виде сложной гипоциклоидной кривой, которая образуется при вращении инерционного элемента относительно собственной оси и вращении по эллиптической орбите с периодическим изменением величины эксцентриситета, при этом эксцентриситет отсутствует при совпадении оси вращения инерционного элемента с главным фокусом, а максимальная величина эксцентриситета равна отношению расстояния от центра эллипса до фокуса к расстоянию от центра эллипса до точки на линии, описывающей контур эллипса, и лежащей на прямой, проходящей через фокусы и геометрический центр длинной оси эллипса.
Способ преобразования направленных механических колебаний в направленное прерывистое поступательное движение осуществляется следующим образом.
Включают приводной двигатель (Фиг.1), вал которого начинает вращаться и это вращение передается через приводную кинематическую связь (не показана) на сбалансированную массу 3. Так как эта связь выполняет функцию передачи вращения на оси указанной массы и одновременно функцию прижатия этой массы к стенке траектории, выполненной в виде эллипса 2, то первая функция может быть осуществлена известным способом с применением различных известных механизмов, способных совершать преимущественно качательное движение, а вторая функция - также известным способом с применением различных упругих звеньев, способных выполнять преимущественно возвратно-поступательное движение за счет изменения длины этих звеньев.
Упругие звенья обеспечивают движение сбалансированной массы относительно главного фокуса эллиптической орбиты; обеспечивают перемещение центра масс по замкнутой кривой движением этой массы по эллиптической беговой дорожке; преобразуют равнодействующую неуравновешенных сил инерции в равнодействующую центробежных сил направленного действия; превращают первичное вращательное движение сбалансированной массы по эллиптической дорожке во вторичное поступательное движение вместе с центром масс системы; обеспечивают надежную работу при высокой частоте вращения; возбуждают силу инерционных импульсов, обеспечивающих движение в пространстве; обеспечивают возможность возврата сбалансированной массы после обкатывания беговой дорожки в точку главного фокуса, являющуюся исходным пунктом движения этой массы; вырабатывают (движением инерционной массы) равнодействующую центростремительных сил, определяющую направление движения в пространстве вместе с центром масс (вторичное движение).
У сбалансированной массы 3 в начальный момент ось совпадает с осью привода, которая, в свою очередь, совпадает с главным фокусом эллипса F1. Эта масса, приведенная во вращение вокруг своей оси, начинает перемещаться, обкатывая беговую дорожку, по направлению к другому фокусу F2 эллипса, проходит этот участок и возвращается в исходное положение, тем самым завершая один полный цикл перемещения, равный одному полному обороту относительно главного фокуса F1. При осуществлении движения масса дополнительно прижимается центробежной силой к беговой дорожке 2 и удерживается на беговой дорожке упругими звеньями. По мере нарастания оборотов привода возникает инерция центробежной силы. При обкатывании эллипса сбалансированной массой происходит пространственное изменение расположения центра масс системы (Фиг.2), траектория которого описывает сложную замкнутую кривую, определяющую местоположение равнодействующей центра масс между центром тяжести сбалансированной массы и центром тяжести системы. Перемещение сбалансированной массы в пределах контура, ограниченного эллипсом, происходит при заданной величине эксцентриситета, при периодическом изменении радиуса, соединяющего главный фокус с осью сбалансированной массы от нулевого значения до максимального.
При этом минимальная величина этого радиуса, равная нулю, получается при совмещении оси сбалансированной массы с главным фокусом эллипса F1 и одновременно с осью приводного вала, а максимальная величина радиуса равна расстоянию между фокусами эллипса: главным и неглавным - F1 и F2.
При поступательном движении тела его можно рассматривать как материальную точку, сосредоточив всю массу тела в его центре тяжести и перенеся в нее все внешние силы, действующие на тело. Перемещение центра масс, а следовательно, перемещение объекта в пространстве зависит от перемещения центра тяжести сбалансированной массы относительно главного фокуса эллиптической орбиты, где находится центр тяжести модуля. Перемещение центра тяжести сбалансированной массы относительно центра тяжести главного фокуса сопровождается описыванием траектории движения центра масс системы по криволинейной замкнутой траектории, зависящей от траектории движения инерционной массы по эллипсу из точки главного фокуса с возвратом в эту же точку. Центр масс системы (модуля) движется как материальная точка, масса которой равна массе всей системы и к которой приложены все действующие на данную систему внешние силы, причем эти силы переносятся в центр масс без изменения их направления. Если тело движется не поступательно, то можно разложить это сложное движение на поступательное движение вместе с центром тяжести и на вращательное движение вокруг центра тяжести. Поступательная часть такого сложного движения тела определяется теоремой о движении центра масс тела, т.е. уравнением:
 где
где
Mac - произведение массы системы на вектор ускорения ее центра масс,
 - геометрическая сумма всех внешних сил, действующих на систему.
- геометрическая сумма всех внешних сил, действующих на систему.
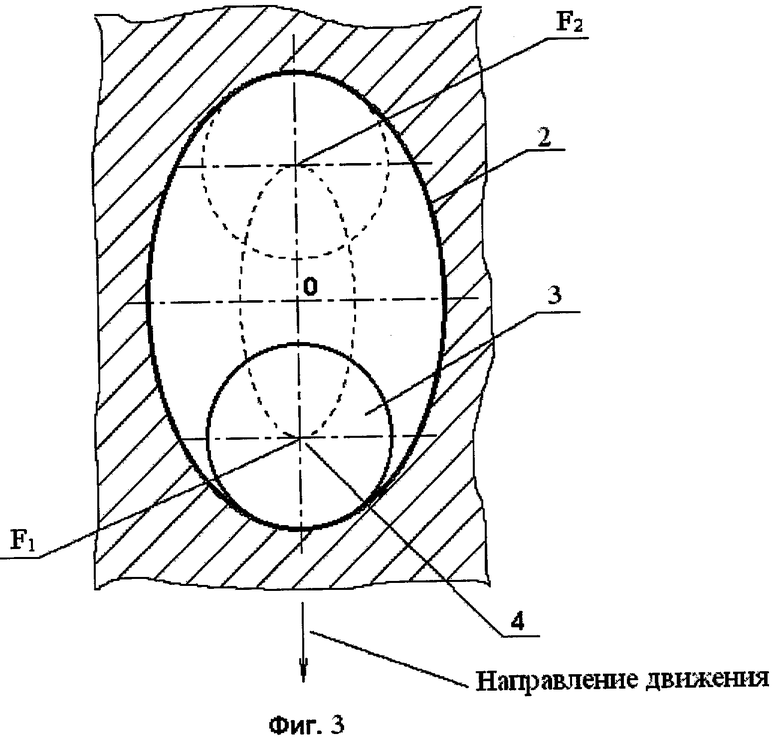
К свободной материальной точке М массой м, движущейся со скоростью v, приложена сила Р, направление которой образует с направлением скорости v некоторый угол (см. Фиг.3). Точка в этом случае будет двигаться по криволинейной траектории с ускорением а=Р/м, направленным одинаково с силой Р. Составляющими ускорения являются:
Касательное, численно равное at=dv/dt - производной от модуля скорости точки по времени, и
Нормальное, равное по модулю аn=v2/r, где r - радиус кривизны траектории в данном положении материальной точки. При криволинейном движении точки приложенную к нему силу Р можно также разложить на две составляющие: касательную (тангенциальную) силу Pt=mat, изменяющую модуль скорости точки, и нормальную (центростремительную) силу Pn=man, изменяющую направление скорости точки. Последняя составляющая заставляет точку отклоняться от прямолинейного пути по направлению касательной к траектории в данной ее точке в сторону соответствующего центра кривизны.
При криволинейном движении точки ее силу инерции также можно разложить на две составляющие:
касательную (тангенциальную) силу инерции Ри t=-mat, направленную противоположно касательному ускорению точки, и нормальную (центробежную) силу инерции Ри n=-man, направленную противоположно нормальному ускорению точки.
Так как нормальное ускорение направлено по нормали к траектории в сторону ее вогнутости, то центробежная сила инерции направлена по нормали в сторону выпуклости траектории, т.е. по нормали от центра кривизны. Центробежная сила инерции равна по модулю и направлена противоположно центростремительной силе.
Если точка М движется по криволинейной траектории равномерно, то v=const и at=dv/dt=0. В этом случае тангенциальная сила инерции обращается в нуль и полная сила инерции равна центробежной составляющей, равной по модулю
Pи=Pи n=mv2/r
В случае, когда точка М принадлежит телу, вращающемуся вокруг неподвижной оси фокуса, то ее касательное и центростремительное ускорение могут быть вычислены по формулам:

an=rω2
где ω,  - угловая скорость и угловое ускорение вращения тела, а r - расстояние точки от оси вращения.
- угловая скорость и угловое ускорение вращения тела, а r - расстояние точки от оси вращения.
Отсюда модули касательной и центробежной сил инерции вычисляем по формулам:

Pи n=mrω2
Если вращение тела равномерное, то  и Ри t=0, и полная сила инерции равна Pи=Pи n=mrω2.
и Ри t=0, и полная сила инерции равна Pи=Pи n=mrω2.
При несвободном криволинейном движении точки действующей на нее центростремительной силой будет реакция связи, заставляющая точку отклоняться от прямолинейного пути и, следовательно, сообщающая ей соответствующее нормальное ускорение. Силой же, действующей на связь, будет являться центробежная сила инерции данной точки. При движении инерционной массы проявлениями центростремительной силы будет давление стенки беговой дорожки на эту массу, а центробежной - давление этой массы на стенку, направленное по той же нормали от центра. При этом несвободном движении сбалансированной массы, т.е. с использованием связи, при быстром вращении, центробежная сила инерции сбалансированной массы, приложенная к связи, заставляет массу, обеспечивая получение импульсов инерционных сил, совершать поступательное движение вместе с центром масс. Величина тяги, получаемая при этом центростремительной силой, зависит от количества оборотов (импульсов), формы беговой дорожки, величины эксцентриситета, конфигурации эллипса или части кривой эллипса (вытянутой или почти кругообразной формы), величины инерционной массы сопротивления среды, силы тяготения.
Способ управляемого перемещения транспортного средства в заданном направлении осуществляется следующим образом.
Транспортное средство, основание которого связано с системой движителей, выполненной по модульной схеме, приводится в движение при их совместной, синхронной и одновременной работе, в результате которой вырабатывается тяга и осуществляется поступательное движение в заданном направлении с обеспечением устойчивости в пространстве транспортного средства.
Тяга, получаемая суммированием тяг двигателей транспортного средства, в зависимости от состояния среды, в пространстве которой происходит перемещение транспортного средства, используется как основной источник перемещения этого средства, но при этом возможно применение транспортных средств как средство для перемещения в подводно-надводном положении, по твердой опорной поверхности, в воздухе и в безвоздушном пространстве.
Устойчивость перемещения транспортного средства (ТС) в водной среде в подводном или надводном положении обеспечивает движитель, размещенный в одной из вершин равностороннего треугольника, образующего контур ТС, при этом ЦТ и ЦМ располагают внутри контура.
Устойчивость транспортного средства на опорной поверхности создают параллельным размещением большой оси эллипса движителя относительно этой поверхности, при этом ЦТ и ЦМ располагают на опоре ТС.
Устойчивость транспортного средства в воздухе создают размещением движителей в вершинах равностороннего треугольника, образующего контур транспортного средства, при этом ЦТ и ЦМ располагают внутри этого контура.
Движение вперед или подъем создают под углом к горизонту.
Устройство (Фиг.1, 2) содержит корпус 1, выполненный в виде эллипса, торцовая поверхность которого выполнена в виде беговой дорожки 2, снабженной боковыми направляющими (не показано) для инерционного элемента в виде ротора 3, который выполнен с возможностью вращения вокруг собственной оси и перекатывания по внутренней образующей беговой дорожки 2, с центром качения в одном из фокусов F1 эллипса, выбранного в качестве главного. Ротор 3 кинематически соединен с приводным валом 4 посредством приводного механизма, включающего размещенные снаружи от корпуса 1 по обе стороны от него две полуоси 5, одна из которых жестко закреплена на приводном валу 4, а другая - в подшипниковом стакане. На каждой из этих полуосей жестко закреплены одним из своих концов водила 6, содержащие на другом конце шарниры 7, служащие для размещения в них одних из концов консольных рычагов 8 и поводков 9. Консольные рычаги 8 выполнены с возможностью поворота относительно водила 6, содержат на своих свободных концах элементы 10 крепления одних концов упругих звеньев 11, которые другими своими концами закреплены на элементах 12 крепления на водилах 6. Поводки 9 выполнены с возможностью вращения одним из своих концов с консольным рычагом 8 и другим - с осью ротора 3. Приводной вал 4, полуоси 5 и ось ротора 3 имеют общую геометрическую ось, которая перпендикулярна плоскости вращения ротора 3 и размещена в фокусе F1 эллипса, контур которого совпадает с образующей беговой дорожки 2.
В исполнении, показанном на Фиг.3, 4, устройство содержит корпус 1, выполненный в виде эллипса, торцовая поверхность выполнена в виде беговой дорожки 2, которая также может быть снабжена боковыми направляющими для инерционного элемента в виде ротора 3, который выполнен с возможностью вращения вокруг собственной оси и перекатывания по внешней образующей беговой дорожки 2, с центром переносного движения в одном из фокусов F1 эллипса, выбранного в качестве главного. Ротор 3 кинематически соединен с приводным валом 4 посредством телескопического приводного механизма, включающего подвижные в осевом направлении цилиндрические полые секции 13, при этом трубчатые секции большего диаметра охватывают секции меньшего диаметра. Секция, связанная с осью ротора 3, имеет наименьший диаметр. Внутри приводного механизма размещен узел принудительного прижатия диска к беговой дорожке, который содержит упругое звено, выполненное в виде пружины растяжения 14 (Фиг.5, 6).
К устройству, выполненному по третьему варианту, может быть подключено другое, аналогичное устройство. В этом случае система из двух устройств (Фиг.7, 8) содержит в отличие от предыдущего варианта подшипниковые стаканы 15, смонтированные в один общий для двух устройств узел, а приводные валы 4 располагают с противоположных сторон устройств - это позволяет уменьшить поперечные размеры системы.
Устройство (Фиг.1, 2) для получения направленных механических колебаний работает следующим образом. При включении источника вращения (не показан) это вращение с приводного вала 4 посредством кинематической связи передается на ось ротора 3 с использованием полуоси 5, водила 6, крайние точки которого совершают круговую траекторию вокруг оси приводного вала 4, шарнира 7 и поводка 9. Консольные рычаги 8, установленные на водиле 6 в шарнире 7, задают длину упругого звена 11. Ротор 3 приводится во вращение вокруг собственной оси и обкатывает беговую дорожку 2, имеющую эллиптическую траекторию, с поджатием его к этой дорожке упругими звеньями 11. Вследствие имеющегося эксцентриситета ротор 3 то удаляется от главного фокуса F1, то приближается к нему, при этом изменяются скорости вращения и координаты центра масс относительно главного фокуса, а направление возмущающей силы, действующей на беговую дорожку, остается постоянным - совпадающим с длинной осью эллипса. В процессе обкатывания ротор 3 вращается неравномерно. Частота перемещения оси ротора равна частоте вращения вала двигателя, а частота вращения ротора вокруг собственной оси равна частоте вращения ротора по беговой дорожке, умноженной на отношение длины периметра беговой дорожки к длине периметра диска.
Устройство (Фиг.3-6) работает следующим образом.
При включении источника вращения (не показан) это вращение с приводного вала 4 посредством кинематической связи передается на ось ротора 3 с использованием полуоси 5 и секций 13. По существу, трубчатая секция самого большого диаметра 13а является водилом, так как последняя вращается относительно одного из фокусов F1 эллипса, выбранного в качестве главного, а секция 13б самого малого диаметра является поводком. Ротор 3 приводится во вращение вокруг собственной оси и обкатывает беговую дорожку 2, имеющую эллиптическую траекторию, с поджатием его к этой дорожке упругими звеньями в виде пружины растяжения 14.
Устройство (Фиг.7, 8) работает следующим образом. Передачу вращения от приводного вала 4 к инерционному элементу 3, обеспечивающее перемещение последнего по эллиптической траектории, производят как и в предыдущем случае, но при этом само вращение осуществляют у одного из устройств по часовой стрелке, а у другого - против часовой стрелки.
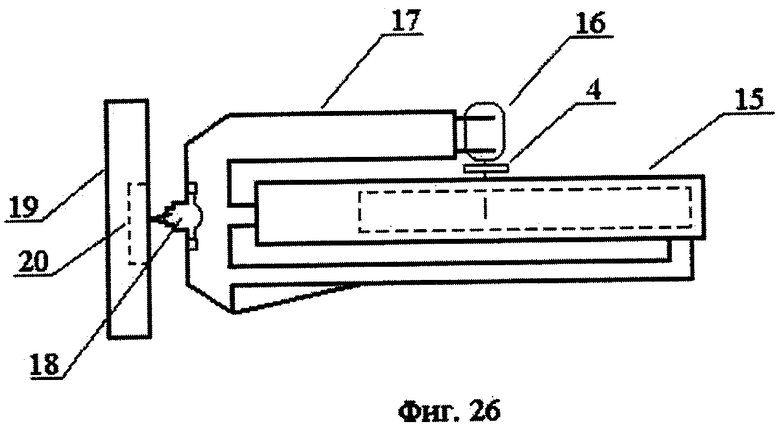
Движитель содержит корпус 15, в котором размещен генератор направленных механических колебаний (на чертежах показан пунктиром), первичный двигатель 16, причем корпус и двигатель жестко размещены на раме 17, снабженной шарниром 18, который присоединен к основанию 19 транспортного средства (не показан), которое, в свою очередь, снабжено виброизолирующим элементом 20, препятствующим передаче колебаний на основание. Двигатель 16 соединен с генератором посредством привода, преобразующим вращение вала 4 двигателя 16 в эксцентричное перемещение ротора 3 генератора относительно одного из фокусов эллипса.
Корпус 15 размещен относительно рамы 17 так, что его плоскость перпендикулярна плоскости рамы. Шарнир 18 выполнен с возможностью изменения угла наклона длинной оси эллипса генератора в вертикальной плоскости в пределах от 0 до 180° путем подъема или опускания дальнего конца рамы 17 относительно шарнира 18. Этот же шарнир обеспечивает поворот корпуса 15 вправо и влево от исходного положения корпуса в пределах от 0 до 45° в каждую сторону путем поворота дальнего конца рамы 17 вправо или влево относительно шарнира 18.
Движитель работает следующим образом.
При включении первичного двигателя 16 вращение от его вала 4 передается на привод, содержащий упругие элементы (звенья), преобразующий асимметричное вращение в эксцентричное движение ротора 3 генератора по его эллиптической беговой дорожке относительно одного из фокусов эллипса, выбранного в качестве главного. В результате этого сложного характера перемещения ротора 3 вдоль длинной оси эллипса генератора получают направленные механические колебания, передающиеся на корпус 15 генератора.
В результате действия периодически возникающей возмущающей силы вдоль длинной оси эллипса происходит перемещение центра масс движителя также вдоль этой оси и, следовательно, самого движителя на некоторое расстояние, величина которого определяется величиной возмущающей силы. Движитель, получивший тяговое усилие, передает ее на основание транспортного средства, которое перемещается на то же самое расстояние. Затем циклы действия импульсов повторяются и приращения расстояний образуют траекторию движения транспортного средства, совпадающую с направлением действия возмущающей силы.
При необходимости изменения направления перемещения транспортного средства в вертикальной плоскости шарниром 18 перемещают раму 17 с размещенным перпендикулярно ей корпусом 15 генератора вверх-вниз, а в случае необходимости поворота транспортного средства в ту или иную сторону этим же шарниром перемещают раму 17 вправо или влево относительно исходного положения длинной оси эллипса.
Так как рама 17 входит в колебательную систему, то на нее также действуют возмущающие силы, которые значительно уменьшаются амортизаторами 20, что позволяет снизить нагрузку на основание 19 транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРОИДНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА И СПОСОБЫ ЕЕ ИСПОЛЬЗОВАНИЯ | 2009 |
|
RU2394338C1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ ЛЕТАЮЩЕЙ ИГРУШКИ | 2007 |
|
RU2353801C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2381078C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННОГО ИМПУЛЬСНОГО ДЕЙСТВИЯ ИНЕРЦИОННЫХ СИЛ В ПОСЛЕДОВАТЕЛЬНОЕ ШАГОВОЕ ПЕРЕМЕЩЕНИЕ ГРУЗОВОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2539446C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| Гидрогравитационный преобразователь | 2020 |
|
RU2762944C1 |
| ОДНОВАЛЬНЫЙ ПЛАНЕТАРНЫЙ ВИБРАТОР НАПРАВЛЕННЫХ КОЛЕБАНИЙ | 2022 |
|
RU2787331C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| ПЛАНЕТАРНЫЙ ВИБРАТОР НАПРАВЛЕННЫХ КОЛЕБАНИЙ | 2024 |
|
RU2829481C1 |

Группа изобретений относится к транспортному машиностроению и может быть использована для получения и передачи механических колебаний и для перемещения транспортного средства в заданном направлении. Способ получения направленных механических колебаний предусматривает обкатывание вращающимся инерционным элементом эллиптической беговой дорожки с поджатием к ней этого элемента. Движение инерционного элемента по беговой дорожке осуществляют относительно оси, совмещенной с одним из фокусов эллиптической траектории, выбранным в качестве главного. Инерционный элемент используют сбалансированный. Способ преобразования направленных механических колебаний в однонаправленное прерывистое поступательное движение предусматривает взаимодействие между собой двух масс системы, одна из которых является инерционной, вращается вокруг своей оси, одновременно перемещается относительно другой массы по эллиптической траектории с упругим поджатием ее к беговой дорожке эллипса, сообщая системе направленные механические колебания. Систему используют неуравновешенную с центром масс, совпадающим в статическом состоянии с центром тяжести этой же системы и с одним из фокусов эллипса. Движение системы осуществляют последовательными шаговыми перемещениями в моменты импульсного действия инерционных сил вдоль длинной оси эллипса максимальной по величине возмущающей силы, направленной от главного фокуса в сторону движения. Способ управляемого перемещения транспортного средства в заданном направлении предусматривает использование для получения силы тяги движителя, вырабатывающего импульсы инерционных сил. Устройство для получения направленных механических колебаний содержит корпус с беговой дорожкой эллиптической формы, инерционный элемент, выполненный с возможностью обкатывания беговой дорожки и вращения вокруг своей оси, и приводной механизм. Движитель транспортного средства содержит устройство для получения направленных механических колебаний, соединенное приводным механизмом с двигателем. Устройство и двигатель жестко размещены на раме, которая выполнена с возможностью размещения на основании транспортного средства. Транспортная силовая установка содержит двигатель и движитель, соединенные приводным механизмом, размещенные на общей раме, выполненной с возможностью взаимодействия с основанием транспортного средства. Технический результат - увеличение значения возмущающей силы, действующей в направлении перемещения. 6 н. и 23 з.п. ф-лы, 35 ил.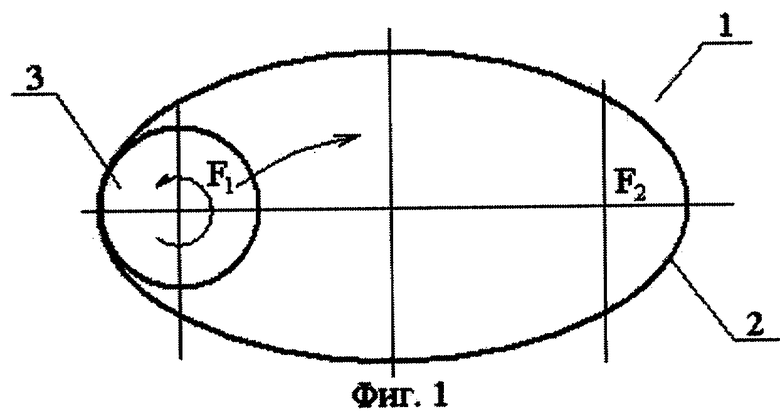
| Конструирование машин | |||
| Справочно-методическое пособие, т.1, под общей ред | |||
| К.Ф.Фролова | |||
| - М.: Машиностроение, 1994, с.343-344 | |||
| ДВИЖИТЕЛЬ ИНЕРЦИОННО-РЕАКТИВНОГО ДЕЙСТВИЯ | 1998 |
|
RU2146631C1 |
| Импульсный фрикционный движитель для самоходных систем | 1961 |
|
SU151574A1 |
| Вибровозбудитель | 1986 |
|
SU1351697A1 |
| RU 2051832 C1, 10.01.1996 | |||
| Транспортное средство | 1974 |
|
SU589150A1 |
| СИЛОВАЯ ИНЕРЦИОННАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044158C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ МАКСИМУМА СИГНАЛА | 1990 |
|
RU2020488C1 |
| DE 4312188 A1, 20.10.1994. | |||

