занными с выходами датчиков гоков через контакты переключателя режимов торможения, а выход и входы сумматора связаны соответственно с входом регулятора тока возбуждения и с выходами 3anoMjniaющих элементов и датчиков токов якоря и обмоток возбуждения, иричем разомкнутая грунна контактов упомянутого нереключателя включена между выходами датчиков токов и входами соответствующих запоминающих элементов и между выходом задающего элемента минимума тормозного момента и входом элемента сравнения канала ограничения тормозного момента, а замкнутая - между выходом задающего элемента максимума тормозного момента и входом упомянутого элемента сравнения и между выходом сумматора и входом регулятора тока возбуждения.
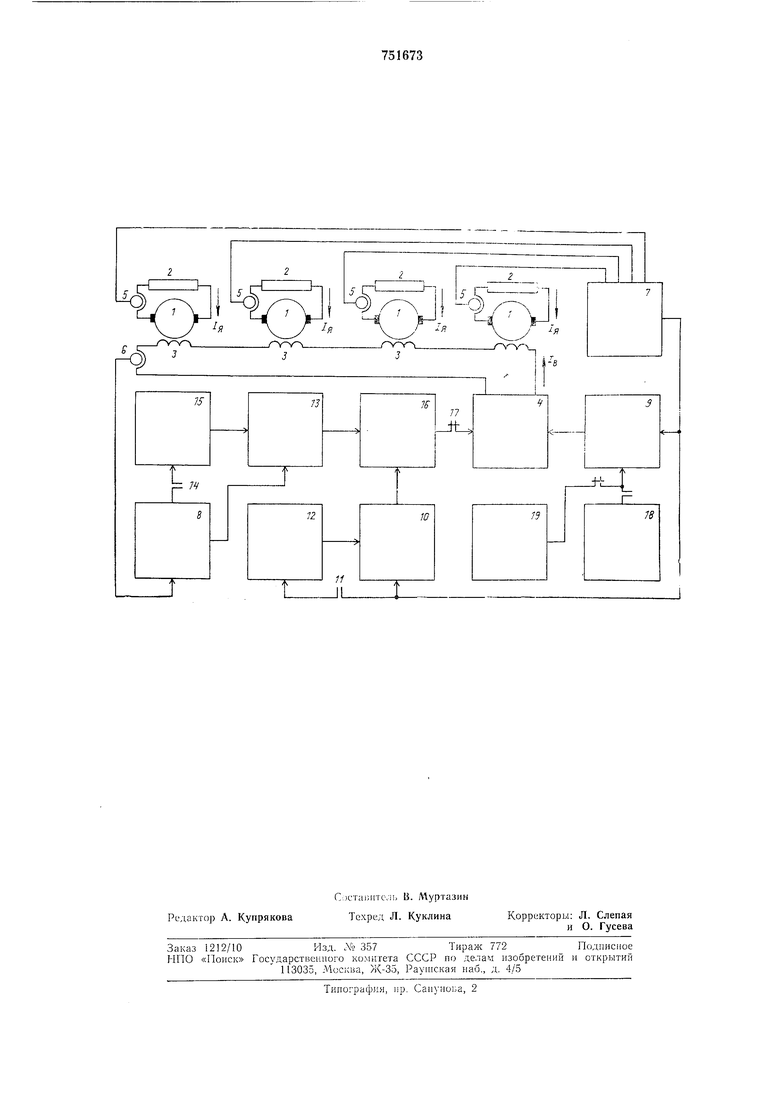
На чертеже представлена функциональная схема устройства для стабилизапни частоты вращения электропривода при реостатном торможении, выполненная для режима реостатного торможения электронодвил ного состава.
Якоря 1 тяговых машин включены на тормозные резисторы 2, а обмотки 3 возбуждения подключены к выходу регулятора тока возбуждения - возбудителя 4. Датчики 5 тока якоря и обмоток 6 возбуждения подключены соответственно к селективному элементу 7 и согласуюидему элементу 8. Элемент 7 пепосредственно подключен к входам элементов 9 и 10 сравнения и через контакт 11 нереключателя режимов торможения - к входу запомипающего элемента 12 тока якоря. Элемент 8 подключен непосредственно к входу элемента 13 сравнения и через контакт 14 нереключателя режимов торможення - к заиоминающему элементу 15 тока возбуждения. Выходы элементов 10 и 13 сравнения нодключеиы к входу элемента 16 сравнения разностей зафиксированных и текущих значений токов, выход которого через контакт 17 переключателя режимов торможения подсоединен к входу возбудителя 4. К второму входу возбудителя 4 иодключен выход элемента 9 сравнения. Элементы сравнения 10, 13, 16 образуют сумматор.
Сигнал, пропорциональный токам /я якорей, поступает в устройство регулирования от датчика 5 через элемент 7, на выходе которого выделяется наиряжение Ua, пропорциональное наибольшему из токов /д. Ток возбуждения /в измеряется датчиком 6 и подается в устройство через элемент 8, в котором преобразуется в напряжение U, пропорциональное току /в. Наиряжение U в элементе 9 сравнения сравнивается с напряжением выхода одного из задающих элементов 18 или 19. Наиряжение с зд. я выходов поданы на вход элемента 9 через контакты двухпознционного переключателя режимов торможения, изображенного на
чертеже в положении, соответствующей режиму стабилизации частоты вращения тяговых мащии. Наиряжение Ly. о выхода элемента 9 сравнения подано на вход возбудителя 4 и обеспечивает изменение тока 1ц до значения, ири котором .n. Величина L/ад. я элеме1гга 19 может формироваться так, чтобы тормозной момент ири всех частотах вращения иривода не иревышал доиустимого ио соответствующим ограничениям, а элемента 18 так, чтобы тормозной момент соответствовал минимуму, необходимому для фиксации соответствующих значений токов /я и /в. Этим нсключаются перегрузки привода в режиме стабилизации частоты вращеиия и обеспечивается необходимый режим работы в ироцессе иредварительного включеиия торможення.
В режиме предварительного торможеиия результирующий сигнал контактом 17 отключен от входа возбудителя 4, и в элемеитах 8, 10, 12, 13, 15, 16 накап.ливается информация, необходимая для стабилизацш;
частоты вращения иа требуемом уровне. Б режиме нредварительнсло торможения наиряжеиие 6я через контакт 11 подано на вход запоминающего элемента 12 1ока якоря, иа выходе которого как угодии до.1го
сохраняется напряжеппе я. ф, равное напряжению входа в момент размыкания контакта 11. В элементе 10 сравнения из фнксироваииого значения наиряжения О„. j вычитается текущее значение напряжении
ья, и образовавщаяся разность ДЬя иодается на вход элемеита 16 сравнения. Аналогичный контур сравнения образуют элементы 8, 15, 13, входным сигналом для которых является ве.анчина тока УВ. Очевидно, что в режнме предварительного торможения ири замкнутых контактах И и 14 величины ДОя и ДЬв равны нулю. Поэтому равно нулю и наиряжение L/y, ф выхода элемента 16 сравнения разностей токов.
Однако в переходных режимах возможпы отклонения напряжений &U,i и Д(Ув от пуля, и поэтому целесообразно отключать напряжение выхода элемента 16 от возбудителя 4 во всех режимах, кроме стабилизации частоты вращеиия, что и осуществляется контактом 17.
Во время предварительного торможения тормозной момент определяется папряжеиием выхода задающего элемента 19. При
иереходе в режим стабилизации частоты вращеиия привода к входу элемепта 9 сравнения подключается напряжение выхода задающего элемента 19, соответствующее предельному при данной частоте
вращения тормозному моменту. Поэтому сигнал Ly. о вновь увеличивается до наибольшего, что могло бы привести к росту тока /я до предельпого. значения. Однако одновременно начинает работать устройство стабилизации частоты вращения привода, ограничивающее изменение токов при неизменной частоте вращения электрических мащин.
Из функциональной схемы следует, что
у.ф - я.ф - я - а.ф + вПри достаточно большом коэффициение усиления возбудителя 4 нанряжение уиравления Uy, ф существенно меньше напряжении С/я и Св. поэтому можно считать величину (Vy. ф равной и. Югда
, и..-и,.с.
Постоянная С онределяется нредшествующими моменту переключения в режим сгаиилизации частоты вращения привода значениями токов /я и в, которым пропорциональны величины ив.ф и Оя. ф. Очевидно, что после переключения в режим схаоилиьации частоты вращения разность этих токов должна сохраняться, так как в нротивном случае появится оольшои сигнал Uy. ф, возвращающий систему в исходное положение, поэтому сохраняются и предшествующие значения токов УЯ и УВ.
пели частота вращения тяговых машин изменится, то ири иеизменном токе IB должен соответственно измениться ток УЯ- мо работа устройства вызывает соответствующее изменение и тока Jt,i аким образом, данное устройство ооеспечивает одиовременное изменение токои якорей и оомоток возоуждения с постоянным значением их разности,- а это соответствует жесткой характеристике реостатного торможения, ь частнос1И, при IB-/a U получается характеристика реостатного торможения с самовозбуждением, имеющая оольшую жесткость.
Исследования устройства, выполненного согласно изобретению, на физической модели с реальными 1Я10ВЬ1Ми машинами показали, что оно обеспечивает хорошую стабилизацию частоты вращения привода на заданном уровне при отпосительно простой конструкции всех входящих в него элементов. При этом общая конструкция системы реостатного торможения, в частности электроподвижного состава, существенно упрощается.
Формула изобретения
j строистзо для стабилизации частоты вращения электропривода при реостатном торможении э 1ектрических машин с независимым возоуждением и ностоянным сопротивлением юрлюзного резистора, содержащее регулятор тока возоуждения, датчики токов якоря 11 оомоток возоуждення, капал ограничения тормозного момента и сумматор, о 1 vl li ч а ю щ е е ся тем, что, с целью унрОБ1.сния оборудования реостатно1О тормоза и повышения надежности его работы и стаоильиости характеристик в режиме стаоилизации частоты вращения, оно снабжено переключателем режимов торможения и заиомипающими элементами токов яксря и оомоток возоуждения, связанными с выходалш датчиков токов через коитакты перек,;ючагеля режимов торможения, а выход и входы сумматора связаны соотве1ственио с входом регулятора тока возоуждепия и с выходами заиоминающих элементов н датчиков токов якоря и оомоток возоуждеиия, причем разомкнутая
группа коптакгов упомянутого переключателя включена между выходами датчиков токов и входами соогветствующих запоминающих элемеитов и между выходом задающего элеме1гга лпщимума тормозного моЭ меита и входом элемеига сравнения канала ограничеиия тормозного момента, а замкнутая - между выходом задающего элемента максимума тормозного момента и входом уиомяиутого элемента сравнения и между выходом сумматора и входом регулятора тока возоуждения.
Источники информацни, ирииятые во виимание при экспертизе 1. кожевников Б. А. 1 вопросу о прпменеиии электрод1П амического тормол ения на тепловозе. Ь кн. «Сборник ленинградского 1П1ститута инженеров железнодорожного транспорта. Ьып. юУ, М., 1рансжелдорнздат, 1958, с. 189-197.
2. Тулупов В. Д. Автоматпческое регулировапие сил тяги и торможения электроподвижного состава. М., «Транспорт, 1976, с. 153-154, 162-189.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1980 |
|
SU943024A1 |
| Способ управления тяговым электроприводом в тормозном режиме | 1986 |
|
SU1460765A1 |
| СПОСОБ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯТОРМОЗНОЙ CHJlbi | 1969 |
|
SU244373A1 |
| Устройство для реостатного торможения автономного локомотива | 1987 |
|
SU1477579A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО | 1969 |
|
SU253110A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780132A1 |
| Устройство для управления тяговым электроприводом | 1976 |
|
SU612839A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2016 |
|
RU2626779C1 |