(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ
i
Изобретение относится к системе авто матического регулирования тяговых влекГроприводов, преимущественно приводов постоянного тока с двигателями последовательного, независимого или смешанного возбуждения.
Известно устройстводля управления электродвигателем постоянного тока, в котором датчики и вычислительные блоки иэмеряют непосредственно или вычисляют ве-, личины тока возбуждения, напряжения, тока якоря , частоты вращения двигателя, реактивной ЭДС , межламельного напряжения и т.д., а затем стабилизируют максимальную из этнх величин в каждый момент ($ времени путем воздействия регулятором на возбуждение электродвигателя или каких-либо других устройств,типа вопьтодобавочного генератора Ц.
. ,20
Устройство это весьма сложно и трудоемко в изготовлении и наладке.
Наиболее близким по технической сущности к изобретению является устройство
ПОСТОЯННОГО ТОКА..
--.. -Г 1 I в
.v,
Р-:, V.--
ДЛЯ управления електродвигателем постоянного тока, содержащее последовательно соединенные логический влемент ИЛИ,вле мент сравнения, усилитель и регулятор тока возбуждения , ко входам логического элемента ИЛИ подключены датчики тока, напряжения, скорости и сигнала уста1вкиГ2. Для ограничения тока вовбу)) дениа двигателя на высоких скоростях движения по величине реактивной ЭДС в устройстве применен функциональный 1блок на основе множительного устрсЛства, перемножающий сигналы, пропорциональные частоте вращения двигателя и его току,
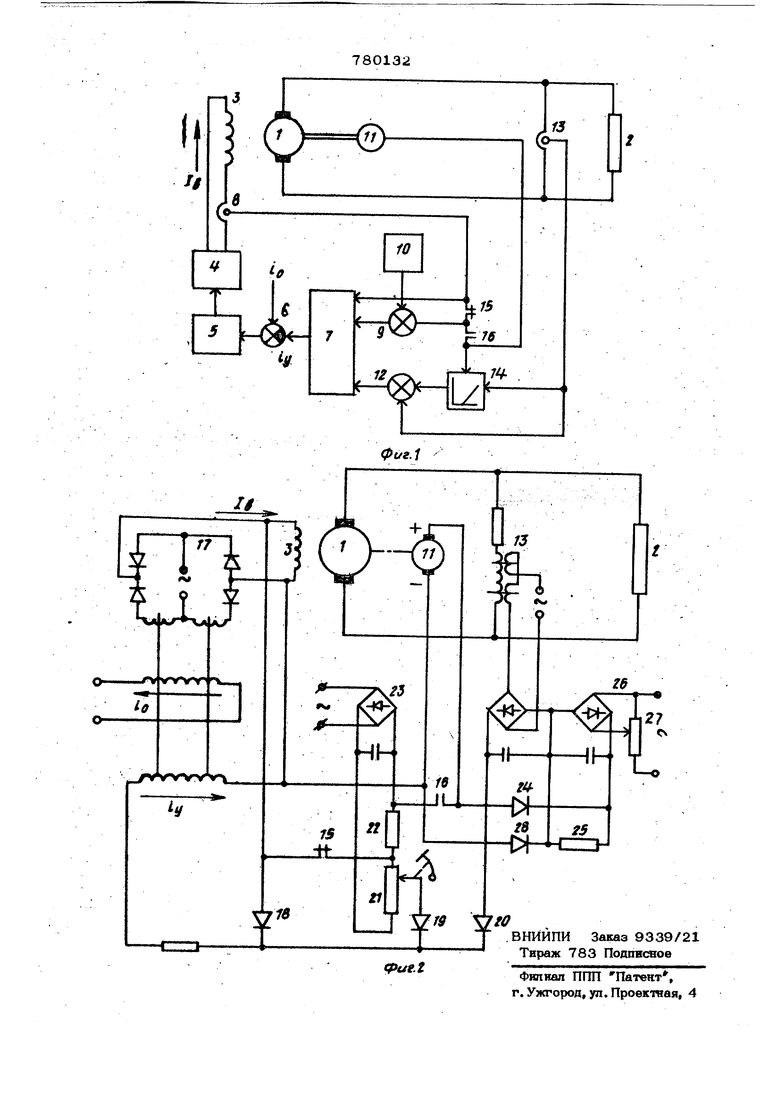
Применение этого вычислительного блока для осуществления отсечки реактивнсА ЭДС существенно улучщает характеристя-. ки привода, но вместе с тем усложняет устройство, ухудшает динамику привода на выссясих частотах и заметно ватрудн ет как изготовление и настройку системы регулирования, так и общую надежность устройства. Цепью изобретения яеляется упрощение устройства и улучшение динамики привода.) Поставленная цель достигается тем, что известное устройство снабжено пропорционально-пороговым элементом , входы которого соединены с датчиками наиряжения Якоря, уставки и скорости, а выход - с одним из входов логического элемента ИЛИ. На фиг. 1 представлена блок-схема; на фиг. 2 - принципиальная схема одного из возможных исполнений устройства ав тематйчесхого регулирования привода постоянного тока. Электродвигатель Постоянного тока 1 (фиг. 1) соединен t тормозным реостатом 2. Током возбуждения 1в в обмотке 3 возбуждения двигателя 1 управляет регулятор 4, соединенный с обмоткой 3 возбуждения и с усилителем 5 сигнала рассогласования, связанным с элементом 6 сравнения опорного сигнала с сигналом обратной связи. Последний формируется связанным с элементом 6 логическим элементом 7 ИЛИ, со входом которого свяваны датчик 8 тока возбуждения, сумматор 9, связанный с датчиком 10 сигнала задания, с датчиком 8 и с датчиком 11 часто1 1й вращения двигателя 1, и сумматор 12, соединенный с датчиком 13 напряжения (или тока якоря) и пропорциЬналь но-поропэвым элементом 14, свябанным с д-атчиком 11 частоты вращения. Сумма- тор 9 соединен нормально-закрытыми контактами 15 переключателя с датчиком 8 и нормально-открытыми контактами 16 с датчиком 11. БлОк-схеме соотВ(этствует принципиальная схема фиК 2, где функции блоков 4-6 выполняет магнитный усилитель 17, а датчика 8 тока возбуждения - сама обмотка 3 возбуждения, падение напряжения на которой пропорционально тсясу возбуждения В схеме фиг. 2 нет .как таковых сумматоров 9 и 12, а суммирование осуЩёСтвпяет ся благодаря последовательному соединению соответствующих блоков. Логический элемент 7 сравнения ИЛИ реализован диодной сборкой на диодах 18-20, датчик сигнала задания представляет собой после дОвательно соединенные регулируемый 21
и нерегулируемый 22 резисторы, подклк ченные к выпрямителю 23 и соединенные с диодом 19 схемы ИЛИ и посредством контактов 15 и 16 переключателя - с обмоткой 3 возбуждения и тахогенератором 11, являющимся тут датчиком частоть вращения . Датчик 13 напряжения соединен с диодом 2О элемента ИЛИ и с прск
При некоторой частоте вращения двигателя реактивная ЭДС двигателя достигает граничного значения. При этой частоте напряжение тахогенератора сравнивается с падением напряжения на резисторе 25. При более высоких частотах вращения двигателя напряжение тахогенератора больше пядения напряжения на резисторе 25. Под порционально-пороговым элементом, состоящим из тахогенератора 11, соединенного последовательно с диодом 24 и с резистором 25, к которому подключен посредством выпрямительного моста 26 исг точник регулируемого потенциометром 27 напряжения. Параллельно элементам 11, 24 и 25 подключен диод 28. Устройство работает следующим образом. Логический элемент 7 ИЛИ на диОдах 18-20 непрерывно сравнивает три сигнала обратной связи: пропорциональный току возбуждения двигателя, измеренному в обмотке 3 возбуждения двигателя 1, пропорциональный сумме сигналов задания и сигнала, пропорционального току возбуждения или частоте вращения двигателя и пропорциональный напряжению или сумме сигналов, пропорционального скорости, и напряжению. Наибольший ив этих сигналов проходит на вход магнитного усилителя 17 и сравнивается в нем с опорным сигна- лом и сигналом рассогласования, усиливается, вследствие чего система автоматического регулирования стабилизирует в каждый момент времени наибольщий из указанных сигналов. Цепочка из сумматора 9, датчика 10 сигнала задания и соединяемых с ним контактами 15 и 16 датчиков 8 и 11 служит для регулирования на частичных характеристиках и при регулировании по предельной характеристике не оказывает влияния на регулирование. При Низких частотах вращения наибольщим является сигнал пропорциональный току возбуждения, при средних частотах - напряжению САР, стабилизирует при этом величину тока возбуждения двигателя (проводит диод 18) или его напряжения И тока якоря. В последнем случае проводит диод 20 и сигнал на входе усилителя 17 пропорционален напряжению. Диод 28 шунтирует элементы 11, 24 и 25 пропорционапьно-порогового элемента 14, Напряжение тахогенератора 11 меньше падения напряжения на резисторе 25, поэтому диод 24 заперт и напряжение на выходе элемента 14 равно нулю, точнее , падению напряженияна открытом диоде 28. действием разности этих напряжений от крывается диод 24 к запирается диод 28, н равность напряжений складывается с сигналом датчика 13 напряжения на входе диода 20 логического элемента ИЛИ. Таким образом, элемент 14 , построенный в схеме фиг. 2 на датчике 11 частоты вращения, диоде 24, резисторе 25, выпрямительном мосте 26 и потенцистлет ре 27, представляет собой пропор(ционально пороговый элемент; выходной сигнал которого равен нулю при частотах вращения двигателя ниже пороговой и пропорционален . разности текущей и пороговой частот вращения при частотах вращения выше граничных. При последовательном соединении этого элемента с датчиком напряжения или тока суммарный сигнал на связанном с ними входе схемы ИЛИ пропорционален напряжению при частотах вращения ниже пороговой а при частотах выше пороговой доля напря жения в суммарном сигнале уменьшается линейно с увеличением частоты вращения двигателя. САР стабилизирует величину эт го суммарного сигнала, вследствие чего напряжение и ток якоря двигателя 1 при больших частотах вращения оказываются меньше граничных, причем тем меньше, че больше частота, что соответствует приблизительно ограничению максимальной величины реактивной ЭДС двигателя. Начало регулирования напряжения и тока на ограничение реактивной ЭДС может подрегулироваться потенциометром 27 при настройке САР. Фундаментальный элемент системы автоматического регулирования - пропорцио нально-пороговый элемент 14 является эле ментом беаинерционным в отличие от замененного или множительного элемента с фильтром в устройстве-прототипе, что благоприятно сказывается на динамических свойствах системы автоматического регулирования в зоне высоких скоростей. Предложенное устройство преднааначег но в основном для автоматического регулирования двигателя постоянного тока при реостатном торможении , но может быть применено и для управления пЪлем двигателя в режиме тяги. Применение устройства позволит получить экономический эффект за счет упрощения системы автоматического регулирования при расширении диапазона частот вращения двигателя и улучшения динамических характеристик привода на высоких скоростях движения. Формула иэобре, тения Устройство для управления .електродвигателем постоянного тока с независимым возбуждением , содержащее последовательно соединенные логический элемент ИЛИ, элемент сравнения, усилитель и регулятор тока возбуждения , причем ко входам логического элемента ИЛИ подключены датчики тока, напряжения, скорости и сигнала уставки, отличающееся , что, с целью повышения надежности, оно снабжено пропорционально-пороговым вле ентом, входы которого соединены с дат уставк и скочикамн напряжения якоря, из входов логирости, а выход - с одним ческого элемента ИЛИ. Источняки информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 383187, кл. Н О2 Р 5/22, 19€9. 2.Авторское свидетельство СССР № 647821, кл. Н 02 Р 3/12, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамического торможения электродвигателя постоянного тока | 1976 |
|
SU647821A1 |
| Устройство для динамического торможения электродвигателя постоянного тока | 1978 |
|
SU694963A2 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод с двухзонным регулированием скорости | 1988 |
|
SU1644343A1 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |