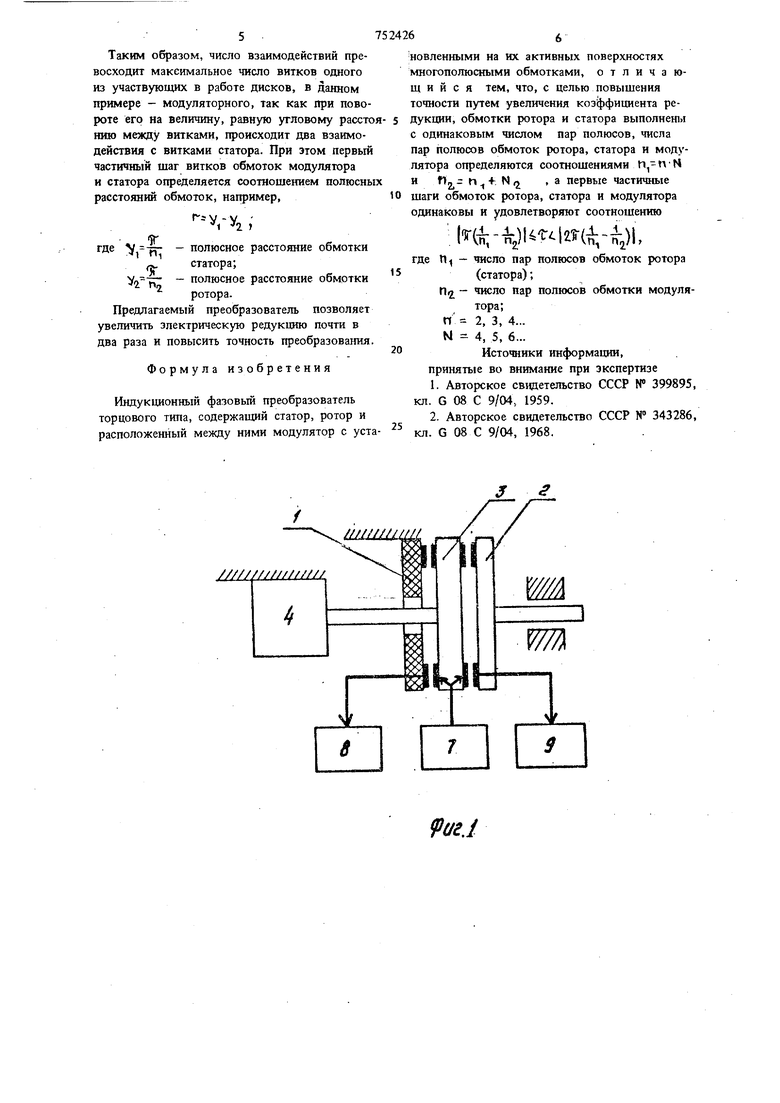
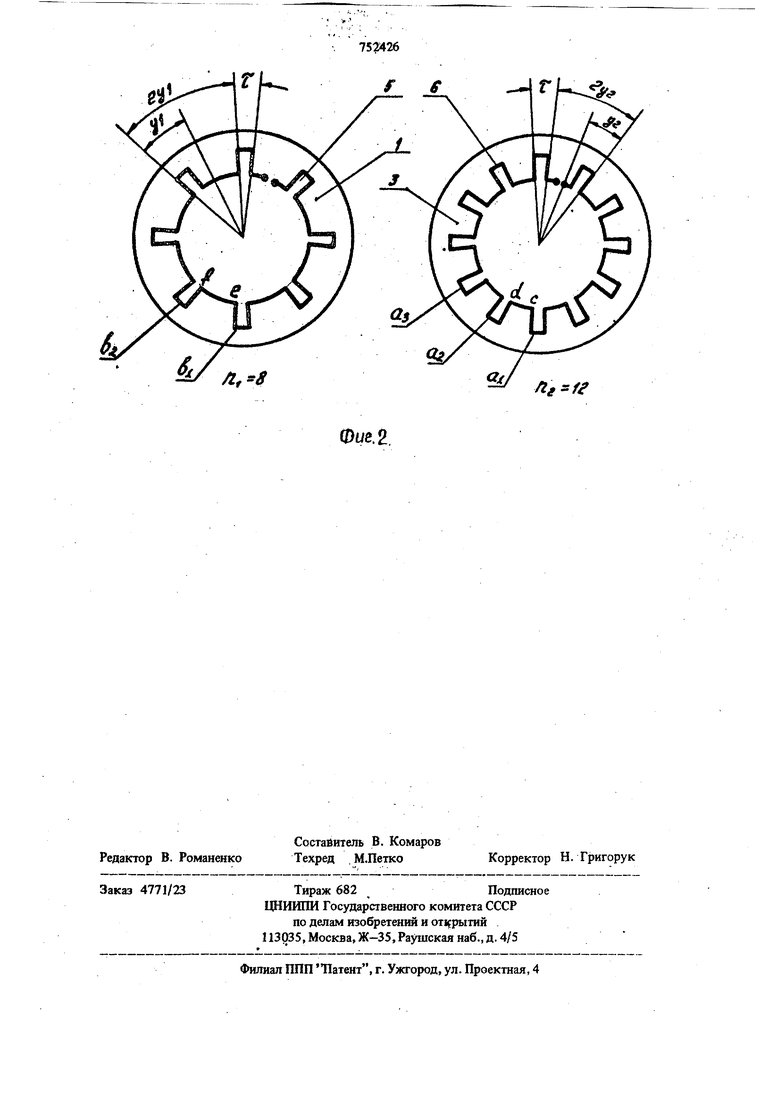
Изобретение относится к автоматике, телеме ханике и вычислительной технике и может быть использовано в высокоточных системах передачи и кодирования угла поворота вала. Параметрические датчики угла с электрической редукцией, содержащие ротор, статор и модулятор, приводимый во вращение от вспомогательного двигателя, являются в настоящее время одними из наиболее точных. Они могут быть основаны на различных физических принципах взаимодействия модулятора со статором (ротором), т.е. изменении емкости между зубцами модулятора и статора (ротора), индуктивности или взаимной индуктивности обмоток. Известен индукционный фазовый преобразователь, работающий по принципу изменения взаимной индуктивности многополюсных плоских печатных обмоток, нанесенных на торцовых поверхностях статора, ротора и модулятора. Обмотки модулятора питаются напряжением высокой частоты, и при вращешш их . электродвигателем наводят в обмотках ротора И статора высокочастотные ЭДС, модулированные по амплитуде с частотой .л-Р, АО где Vj - скорость вращения даигатеяя (об/с); Р - коэффициент электрической редукции, т.е. максимальное число пар полюсов на одной из взаимодействующих обмоток модулятора и статора (ротора). Фаза огибающей ЭДС ротора при повороте . его на угол изменяется относительно фазы огибающей ЭДС статора по закону P--Pok, Огибающие вьоделяются с помощью детекторов, и по их фазовому сдвигу судят об угле поворота ротора, сочлененного с измеряемым валом 1 . Однако максимальное число пар полюсов обмотки данного преобразователя ограничивается диаметром преобразователя и технологическими возможностями, т.е. предельной минимальной шириной проводников обмоток. 3 Кроме того, нанесение значительного количества пар полюсов усложняет процесс производства, занимает много времени при нарезке проводников на делительной машине и последующей ретуши обмоток (устранении заусенцов, вырывов и т.п.) Наиболее близким к изобретению по технической сущности и получаемому результату является индукционный фазовый превбразователь, содержащий статор, ротор и модулятор с установленными на их активных поверхностях миогополюсными обмоткамиГ Недостаток известного преобразователя заключается в невысокой точности преобразован Цель изобретения - повышение точности путем увеличения козффициента редукщш. Поставленная цель достигается тем, что обмотки ротора и статора выполнены с одинако вым числом пар полюсов, обмотки модулятор статора и ротора выполнены с чисЛом пар полюсов yt 41-N и ., соотве ственно, первые частичные шаги обмоток статора, ротора и модулятора выполнены равным в соотношении . IS-(i-A)U.|2ir()|, где h,nN - число пар полюсов обмотки статора (ротора); г Ч N - число пар полюсов обмотки модулятора; П - 2, 3, 4.... N 4, 5, 6.... На фиг. 1 представлена блок-схема преобра зователя; на фиг. 2 - плоские печатные обмотки статора (ротора). йщукционный фазовый преобразователь содержит статор 1, ротор 2, сопрягаемый с из меряемым валом, и модулятор 3, приводимый во вращение двигателем 4. Статор, ротор и модулятор выполнены в виде дисков из изоляционного материала (например, стекла), на которых расположены плоские печатные много полюсные обмотки. Обмотка 5 статора I, а также обмотка рото ра 2 одинаковы, имеют каждая равное число пар полюсов и равномерно (т.е. не образуя отдельных групп, секций) размещены по всей окружности дисков. Обмотка 6 на одной стороне диска модулятора 3, взаимодействующ с обмоткой 5 статора 1, а также обмотка на другой поверхности диска модулятора, взаимодействующая с обмоткой ротора 2, одинаковы, размещены равномерно и имеют каждая равное число пар полюсов. Первый частичный шаг обмоток модулятора, статора и ротора, измеренный в радиа 6 нах, одинаков и выполнен в соответствии с соотношением где П,-HN - число пар полюсов обмотки ротора (статора); число пар полюсов обмотки модулятора; И - 2, 3, 4 N 4, 5,6 Обмотки модулятора 3 подключены к высокочастотному источнику 7 питания. Обмотки статора и ротора подключены соответственно к усилительно-детектирующим устройствам 8 и 9.. Преобразователь работает следующим образом. Обмотки модулятора 3, вращаемого двигателем 4, питаются током высокой частоты от источника питания 7. В результате взаимодействия с обмотками модулятора В обмотках ротора и статора наводятся высокочастотные ЭДС, модулированные по амплитуде частотой F-F -Р in.n, Р - - козффициент электричес1 I П - п. кой редукции предлагаемого преобразователя. Относительный фазовый сдвиг огибающих высокочастотных ЭДС ротора и статора, вьщеленных с помощью детекторов 8 и 9, равен 1 1 ) где сА - угол поворота ротора 2. Таким образом, козффициент Р электрической редукции предлагаемого преобразователя превосходит число пар полюсов взаимодействующих обмоток модулятора и статора (ротора). Число одновременно взаимодействующих витков определяется величиной N.. Для обмоток, показанных на фиг. 2, р. 2 и N 4, следовательно П. 24 8, 12, Р. i 24. Если совместить центры дисков модулятора 3 и статора 1, то при враццении обмоток 6 против часовой стрелки происходит взаимодействие Четырёх (поскольку 4) повторяющихся групп витков модулятора и статора. Ддя объяснения принципа работы преобразователя достаточно рассмотреть одну такую группу, например, витки модулятора OvOj иа , взаимодействующие с витками статора Ь., иЬ Для первоначального относитешного положения обмоток выходная ЭДС витка Ъ. о азуется за счет взаимоиндукции с витком а, модулятора. Затем, при вращении модулятора, в данной группе происходит взаимодействие витка , с витком Ъ , после чего виток а заимодействует с витком ti, 5Таким образом, число взаимодействий превосходит максимальное число витков одного из участвующих в работе дисков, в данном примере - модуляторного, так как при повороте его на величину, равную угловому рассто нию между витками, происходит два взаимодействия с витками статора. При этом первый частичный шаг витков обмоток модулятора и статора определяется соотношением полюсны расстояний обмоток, например, Гг V -V У У2 - полюсное расстояние обмотки статора; - полюсное расстояние обмотки Предлагаемый преобразователь позволяет увеличить зпектрическую редукцию почти в два раза и повысить точность преобразования Формула изобретения Индукционный фазовый преобразователь торцового типа, содержащий статор, ротор и расположенный между ними модулятор с уст 6 новленными на их активных поверхностях многополюсными обмотками, отличающийся тем, что, с целью повышения точности путем увеличения коэффициента редукпии, обмотки ротора и статора выполнешл с одинаковым числом пар полюсов, числа пар полюсов обмоток ротора, статора и модулятора определяются соотношениями М, л N 2. первые частичные шаги обмоток ротора, статора и модулятора одинаковы и удовлетворяют соотношению ln-R;-,))i где tt - число пар полюсов обмоток ротора (статора); n/i- число пар полюсов обмотки модулятора; 2, 3, 4... N 4, 5, 6... Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 399895, кл. G 08 С 9/04; 1959. 2.Авторское свидетельство СССР № 343286, кл. G 08 С 9/04, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многополюсный вращающийся трансформатор | 1974 |
|
SU764052A1 |
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| Индукционный редуктосин | 1985 |
|
SU1350772A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| Индукционный фазовый преобразователь | 1973 |
|
SU501406A1 |
| Датчик для обнаружения короткозамкнутых витков в обмотках статоров электрических машин | 1983 |
|
SU1164633A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| Многополюсный вращающийся трансформатор | 1980 |
|
SU898565A2 |
ff/u
(Due. 2,
