(54) ДВУХФАЗНЫЙ ДВОИЧН1)1Й ДАТЧИК ТЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Многополюсный двухфазный датчик угла | 1977 |
|
SU736283A1 |
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 2012 |
|
RU2497264C1 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2065243C1 |
| Индукционный редуктосин | 1985 |
|
SU1350772A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ТРЕХФАЗНЫЙ РЕАКТИВНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2153218C1 |
| ИНДУКТОРНЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2009 |
|
RU2430817C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2571955C1 |
1
Изобретение относится к электрическим машинам, а именно к 0атч1ска угла, и предназначено для использования в следящих системах с электричоской ррдукцией; двухотсчетных преобразователях угол-код вьюокой точности.
Известны устройства типа редуктосинов и много полюсных вращающихся трансформаторов, содержащие две измерительные фазные обмотки, сдвинутые на четверть углового периода l} и 2} .
К этим приборам предъявляется требование повыщенного числа периодов Ц на оборот, т.е. повыщение электрической редукции. Повышение числа периодов требует повышения числа зубцов на окружности. В случае, если датчик входит в преобразователь угол-код, повышение числа периодов дает повыщение общей точности преобразователя (увеличивает число двоичных разрядов).
Предъявляется требование также к повышению точности, в первую очередь точности периодичности, т.е. повторяемости форксы Kpimh x периода, что определяет Bi fxc/nix-v-i точность. Технологическик{ ограничение. лдсчг ь является минимум ллинм пуги зубцового шага, которая в нескол1 ко пз должна превышать зазор, а сниженя последнего гтриводит к нестабильности и ухудшению точности. При этом на окружности должны быть расположен. обе обмотю фаз. В известном м11о1Х)гюлюсном двухфаз10ном вращающек ся трансформаторе Г2Т применяется нониуско - расположение зубпов, при которюм некоторому числу К зубцов на статоре 2 соответствует (K+l) или (K-l) зубцов ротора Z р на
(5 той же дуге. На окружности совокупность зубцовых катушек каждой фазы занюхает дугу, равную полови{е длины окружности. Число периодов на окруж j кость р. Если Q - общий наибольший делитель чисел 2р и Z .. , то обмотка распадается на Q одинаковых групп. Вследствие технологических случайных отклонений, напряжения на группах мож37
но рассматривать как случайные величины. Каждая фаза занимает свою часть окружности, и в фазе G| /2 групп. Число Q одинаковых групп нельзя сделать практически большим восьми. Между
тем, в отношении точности играет большую роль закон .усреднения ошибок при суммировании случайных величин. В среднем от суммирования случайных технологических и прочих отклонений снижение ошибки происходит в VQ /2 2 раза, если даже 1соэффициент редукции порядка ста.
Много лучше точность периодичности многополюсных поворотных трансформаторов (сельсинов), не имеющих нониусного расположения зубцов 13|. Здесь число суммируек ых случайных величин порядка числа зубцов и коэффициент снижения ошибки более VlNf . Особое значение имеет то, что здесь действует закон циклической корреляции отклонений от идеального в паре взаимодействующих зубцов статора иротора, так что (снижение много больше чем в VN раз.
Однако.в таком двухфазном однопакетном датчике ротор имеет вдвое больше зубцов, чем возбуждаемый статор, а зубцовое деление ротора не должно быть менее технологически допустимого, число периодов -Ь р /4, так как приходится чередовать зубцовые катушки каждой из двух фаз, делая между ними сдвиг на четверть углового периода. Таким образом при повороте на полный угловой период KaryLUKa ротора перемещается на 4 роторных зубца. При нониусном расположении катушка перемешается соответственно на 2 зубца.
Наиболее близкий предлагаемомудвухфазный двоичный датчик угла с коэффициентом электрической редукции равным 2 (где п -целое число) со-г держит два зубчатых магнитопровода с обмотками: первый магнитопровод, например статора, выполнен с 2 зубцами, равномерно расположенными по отфужности, на которых размещена обмотка возбуждения, причем направления ее намотки на двух соседних зубцах чередуют :я, второй магнитопровод, например ротора, вьшолнен с зубцовым шагснл большим зубцового шага магнитопровода статора ( ; зубцы ротора разбиты на две группы, на зубцах первой г руппы активных - размещены двухфазные измерительные обмотки, а зубцы второй группы - бе аобмоточные сувеличенной по сравнению с активными зубцами поI4
люсной дугой, причем зубцовый шаг между двумя активными зубцами, прилегающими к безобмоточному зубцу, выполнен большим зубцового шага между остальными активными зубцами |4.
Однако из-за изменения по углу магнитной проводш 1ости для потока возбуждения указанный датчик обладает малой точностью.
Цель изобретения -. повышение точности.
Для реализации указанной цели количество зубцов ротора выполнено равным
Z arz-i±Hi 1
р 3L с 2
с увеличением зубцового делителя между активными зубцами ротора, примьпсающими к безобмоточному зубцу.
с 2
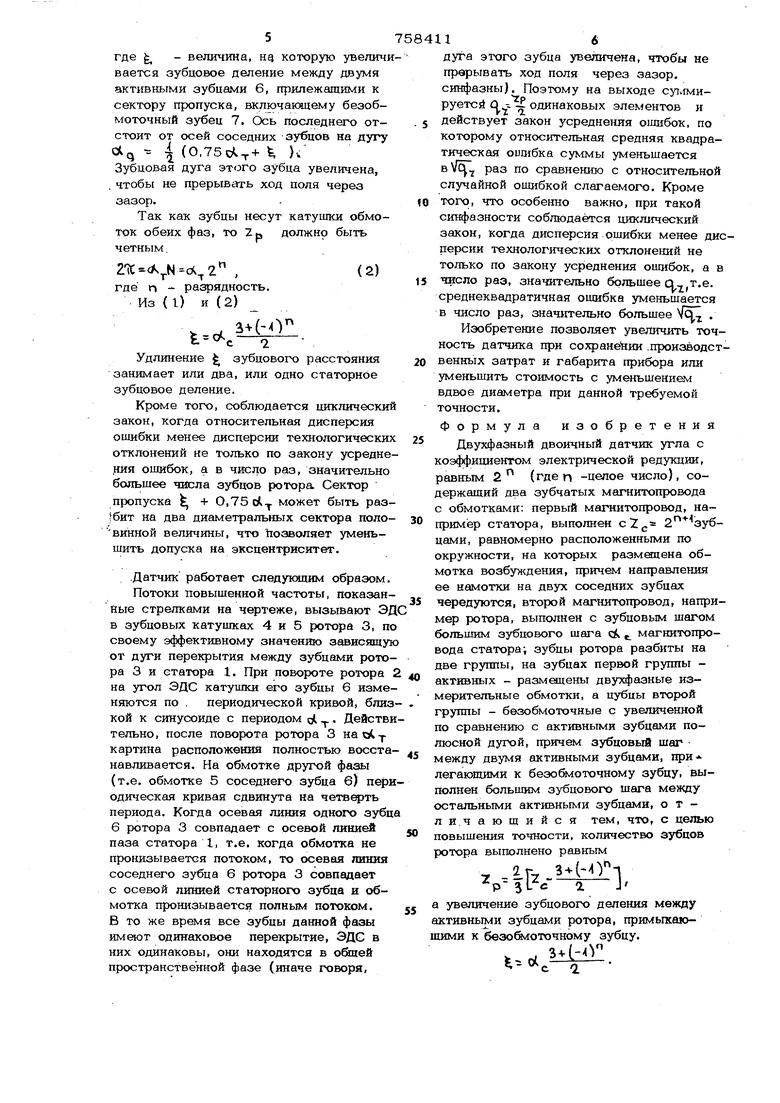
На чертеже изображена схема статора и ротора многополюсного двухфазного индукционного датчика, имекщего на выходе Js( угловых периодов на оборот, причем двоичное число.
Статор насчитывает 2 с 2N зубцов. На зубцах магнитопровода 1 статора намотаны катушки обмотки возбу сдения 2 .с обратным направлением намотки в соседних зубцах, соединенные последовательно. Направления потоков в зубцах чередуются, так что в соседних зубцах направления обратные (показаны стрелками), d 23C/N - угловой период. Коэффициент электрической редукции равен М
На магнитопроводе 3 ротора расположены зубцовые катушки обмоток 4 и 5 двух фаз: обмотки гп.п. и обмотки rnQin« . Каждая обмотка намотана через зубец к с чередованием направления намотки. Зубцовый шаг статора 1 -Qlc- О, а зубцовый шаг ротора 3 , 1,5Ь1сДЛя всех зубцов, несущих обмотк 6, кроме одного увеличенного шага, включающего беаобмоточный зубец 7.
Активные зубцы 6 ротора 3 не заполняют окружности, и на роторе 3 имеется увеличенное межзубцовое расстояние Iсектор пропуска), включающее безобмоточный дополнительный зубец 7 с зубцовой дугой б -ё-г- - (), отличной от таковой 6ip всех остальных активных зубцов. Число активных зубцов ротора обозначаем Тр , Очевидно, что
. 2X-ZpO, , (1) где - величина, нд которую увеличи вается зубцовое деление между двумя активными зубцами 6, прилежащими к сектору пропуска, включающему безобмоточный зубец 7. Ось последнего отстоит от осей соседних зубцов на дугу q { (0, fe, )i Зубцовая дуга этого зубца увеличена, . чтобы не прерывать ход поля через зазор. Так как зубцы несут катушки обмоток обеих фаз, то 2р должно быть четным. где п - разрядность. Из (I) и (2) -.Удлинение зубцового расстояния занимает или два, или одно статорное зубцовое деление. Кроме того, соблюдается циклически закон, когда относительная дисперсия ошибки менее дисперсии технологически отклонений не только по закону усредне ния ошибок, а в число раз, значительно большее числа зубцов ротора Сектор пропуска + 0,75 61- может быть раз бит на два диаметральных сектора поло винной величины, что 11ОЗволяет уменьшить допуска на эксцентриситет. .Датчик работает следующим образом Потоки повышенной частоты, показан ные стрелками на чертеже, вызывают Э в зубцовых катушках 4 и 5 ротора 3, п своему эффективному значению зависящу от дуги перекрытия между зубцами рото ра 3 и статора 1. При повороте ротора на угол ЭДС катушки его зубцы 6 изме Н5потся по . периодической кривой, бли кой к синусоиде с периодом cjl . Действ тельно, после поворота ротора 3 наЫ-г картина расположешш полностью восста навливается. На обмотке другой фазы (т.е. обмотке 5 соседнего зубца б) пе|5 одическая кривая сдвинута на четверть периода. Когда осевая линия одного зубц 6 ротора 3 совпадает с осевой линией паза статора I, т.е. когда обмотка не пронизывается потоком, то осевая тшния соседнего зубца 6 ротора 3 совпадает с осевой линией статорного зубца и обмотка пронизывается полным потоком. В то же время все зубцы данной фазы имеют одинаковое перекрытие, ЭДС в них одинаковы, они находятся в общей пространственной фазе (иначе говоря. И6 дуга этого зубца увеличена, чтобы не прерывать ход поля через зазор, синфазны). Поэтому на выходе с тугмируетсй С -f одинаковых элементов и действует закон усреднения ошибок, по которому относительная средняя квадратическая оишбка суммы уменьшается eV раз по сравнению с относительной случайной ошибкой слагаемого. Кроме того, что особенно важно, при такой синфазности соблюдается циклический закон, когда дисперсия ошибки менее дисперсии технологических отклонений не только по закону усреднения ошибок, а в число раз, значительно большее п т.е. среднеквадратичная ошибка уменьшается в число раз, знач 1тельно большее Vq . Изобретение позволяет увеличить точность датчика при сохранении .производственных затрат и габарита прибора или уменьшить стоимость с уменьшением вдвое диаметра при данной требуемой точности. Формула изобретения Двухфазный двоичный датчик угла с коэ4)фициенгом электрической редукции, равным 2 {гдеп -целое число), содержащий два зубчатых магнитопровода с обмотками: первый магнитопровод, например статора, выполнен clZ. 2 зубцами, равномерно расположенными по окружности, на которых размешена обмотка возбуждения, причем направления ее намотки на двух соседних зубцах чередуются, второй магнитопровод, например ротора, выполнен с зубцовым шагом большим зубцового шага с магнитопровода статора; зубцы ротора разбиты на две группы, на зубцах первой группы активных - размоцены двутсфазные измерительные обмотки, а цубцы второй группы - безобмоточные с увеличенной по сравнению с активными зубцами полюсной дугой, причем зубцовый шаг между двумя акт1шными зубцами, при легаюшими к безо оточному зубцу, выполнен большим зубцового шага между остальными активньми зубцами, о т ли.чающийся тем, что, с целью повышения точности, количество зубцов ротора выполнено равным 7 Ч 1±НГ p jLV-1-а увеличение зубцового деления между активными зубцами ротора, примыкаюими к 6e3o&vioT04HOMy зубцу. ъ( -- 01, 1 Источники ии юрмании, принятые во внимание (фи 1.Ахметжанов А. Л. и Лукиных f{, Индукционный р©дук1Х)син, М., 1971, табл. 7. 2.Пульор Ю. М. Индукционные и электромеханические элементы вычисли тельных и дистанционио-следяших систе М., Машиностроение , 1964. 18 3.Техническая кибернетика. Под fien. В. В. Сюлодовникова. Уст юйство и элементь1 САР и САУ, кн. Г , разд. Ц , гл. ЯУ . № 3, п. 6 Многополюсные поворотные трансформаторы, М., Машиностроение, 1973. 4.Хрущев В. В. Электртгеские микромашины автоматических устройств. Л., Энергия, 1976, с. 276-277.
