(54) СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ НА ЭЛЕКТРОСТАНЦИИ
t
Изобретение относится к области регулирования частоты в энергосистеме и может быть использовано на гидроэлектростанциях,е
Известен способ регулирования частоты на электростанциях путем изменения активной мощности станции в функции текущего значения частоты, измеренной на шинах станции i - |Q
Недостаток указанного способа заключается в том, что при применении его на гидростанциях с длинными трубопроводами приходится выбирать такие настройки стабилизирующих устройств, которые существенно замедляют процесс- регулирования частоты в системе.
Известен способ регулирования частоты на гидроэлектростанции, в котором измеряют сигнал текущего отклонения частоты станции от заданной уставки, И преобразуют его в сигнал управления активной мсвцностью станции с помощью устройства, реализующего заданный закон регулирювания 2} .25
Этот способ также обладает недостатком при применении его на гидростанциях с длинными трубопроводами, на которых сильно выражено явление гидроудара, а также на станциях, на которых групповое регулирование час- Л
тоты осуществляется с помощью цифровых управляющих машин. Явление гидроудара также как и дискретность регулирования, вызванная применением цифровых управляющих- машин, вносит запаздывание в контур регулирования частоты станции. Это затрудняет обеспечение устойчивости системы регулирования и вынуждает применять такие настройки стабилизирующих устройств регулятора частоты, которые сильно замедляют процесс регулирования частоты. Замедление процесса регулирования частоты приводит к замедленному вводу генерирующей мощности при набросах нагрузки, что при небольших резервах генерирующей мощности в системе может способствовать возникновению аварий типа лавины частоты.
Целью изобретения является повышение надежности энергосистемы путем увеличения скорости регулирования частоты .
Поставленная цель достигается тем, что при измерении отклонения частоты станцииЪт заданной устагки и формировании сигнала управления активной мощностью, в каждом цикле регулирования дополнительно измеряют механический
.момент станции, затем формируют сигналы оценок отклонения частоты и отклонения активной мощности. Оценку отклонения частоты формируют путем суммирования .запомненных из предыдущего йикла оценок отклонения частоты, отклонения активной мощности и измерен,ных в текущем циКле механического момента и отклонения частоты, а оценку отклонения активной мощности формируют путем суммирования запомненных из предыдущего цикла оценок отклонения частоты, отклонения активной мощности и измеренного в текущем цикле отклонения частоты. Все слагаемые берут с коэффициентами, определенными параметрами энергосистемы, затем прогнозируют значение отклонения частоты путем суммирования полученных оценок и механического момента станции, взятых с коэффициентами, зависящими от постоянной времени трубопровода и периода обновления управляюще- го воздействия. В зависимости от полученного сигнала управляют активной мощностью станции.
Использование прогноза частоты позволяет компенсировать, запаздывание в контуре регулирования частоты на станции и за счет этого увеличить область устойчивости системы регулирования в плоскости настроечных коэффициентов регулятора частоты. В результате появляется возможность выбрать такие настроечные коэффициенты, которые значительно уменьшают время, регулирования частоты. Прогноз частоты системы осуществляется с помощью автоматически подстраиваемой модели энергосистемы.
Перемеь ные состояния модели энергосистемы, в которой работает регулируемая станция, описываются следующей системой уравнений
. р
а (f-S) ;
- DS +
нб ЫЬр т
.. .
:f-s), где S - оценка ч астоты энергосистемы
. - оценка небаланса активной мощности энергосистемы; f - частота, замеренная на станции ;
Tj. - эквивален.тная постоянная инерции роторов генераторов эн.ергосистемы;D - коэффициент самовыравнивания
энергосистемы; - постоянные коэффициенты.
а, ,а В уравнения модели энергосистемы дополнительно включены члены, пропорциональные рассогласованию между измеренной частотой на станции и оценкой частоты в энергосистеме, осуществляющие подстройку модели. Это позволяет уменьшить ошибки, возникающие при оценке состояния энергосистемы. Прогноз частоты энергосистемы осуществляется на основании текущих оценок частоты и небаланса активной мощности энергосистемы. В предлагаемом способе приведенные уравнения реализованы в конечноразностной форме.
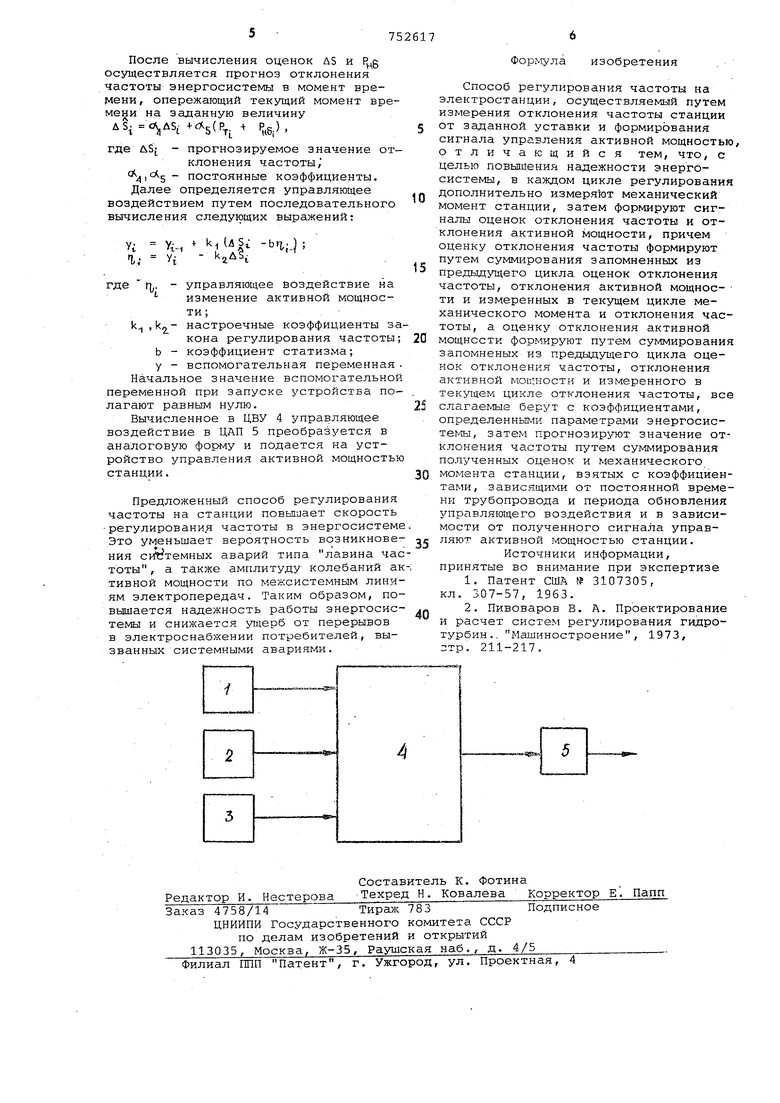
На чертеже показана функциональная (йхема, реализующая предложенныТ способ регулирования частоты на станции
Функциональная схема содержит датчик 1 частоты, устройство 2 задания уставки по частоте, устройство 3 для измерения механического момента, цифровое вычислительное устройство (UBVJI 4 и цифроаналоговый преобразователь (ЦАП) 5..
Выходы датчика 1 частоты, устройства 2 задания уставки и устройства 3 для измерения механического момент.а подключены к соответствующим входам ЦВУ 4. Выход ЦВУ 4 через ЦАП 5 соединен с устройством управления активной мощностью станции.
Процесс вычисления и выдачи нового значения сигнала управления активной мощностью осуществляется периодически. На каждом цикле работы устройства сначала опрашиваются датчик 1 частоты, устройство 2 задания уставки и устройство 3 для измерения механического момента. Измеренные сигналы поступают на соответствующие входы ЦВУ 4. В ЦВУ первоначально вычисляются текущие значения оценок отклонения частоты ДЗ небаланса активной мощности энергосистемы. С этой целью последовательно вычисляются .следующие выражения: fi fi-fo )
AS, ASi-,,. - Р,5., -DAS . -д5 ) . . Р«&Г V, cA(ufi - usj где f-сигнал от датчика частоты;
-сигнал от устройства задания уставки;
-сигнал от устройства измерения механического момента;
-индекс, соответствующий значениям переменных в текущий момент времени;
i -1
индекс, соответствующий значениям переменных на предыдущем цикле работы вьгчислительного устройства; A,.O - постоянные . коэффициенты..
Вычисленные значения д5 и запоминаются в памяти цифрового вычислительного устройства с тем, чтобы их можно было использовать на следующем цикле работы вычислительного устройства. При первоначальном запуске устройства Д5 и полагают равными нулю. Если в результате действия неучтенных факторов или неточного задания начальных значений ДЗ и возникнет рассогласование между текущей оценкой отклонения частоты, полученной в ЦВУ, и отклонением частоты в энергосистеме то указанное рассогласование используется для корректировки получаемых оценок. Вследствие этого ошибки оценивания сводятся : --лку муглу,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интеллектуального управления нагрузкой в изолированных энергосистемах в аварийных режимах и устройство для его осуществления | 2022 |
|
RU2812195C1 |
| Устройство для автоматического регулирования частоты энергообъединения | 1980 |
|
SU1046838A1 |
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1980 |
|
SU879702A1 |
| Способ автоматического регулирования мощности первичного двигателя генератора | 1977 |
|
SU748773A1 |
| Способ автоматического ограничения перетока мощности электропередачи | 1990 |
|
SU1823069A1 |
| Способ интеллектуального управления напряжением и реактивной мощностью энергосистемы | 2022 |
|
RU2793231C1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1983 |
|
SU1120449A1 |
| Устройство для автоматического регулирования частоты и перетоков мощности энергообъединения | 1982 |
|
SU1070641A1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1774431A1 |
| Способ управления электрической станцией, содержащей асинхронный генератор и источник реактивной мощности | 1991 |
|
SU1815735A1 |
