Изобретение относится к авиационно-ракетно-космической технике и предназначено для автоматического подъема в отсеках летательных аппаратов (ЛА) объектов соответствующего назначения, автоматической установки их в заданный (расчетный) момент времени в соответствующей исходной позиции для их последующего запуска (старта).
Известны устройства, где крылатые ракеты и снаряды устанавливаются на подкрыльевых пилонах или на подфюзеляжных узлах подвески самолетов.
Однако такие устройства имеют ряд существенных недостатков: - наружная подвеска крылатых ракет и снарядов существенно ухудшает аэродинамические характеристики крыла и самолета в целом (увеличивает лобовое сопротивление, уменьшается подъемная сила и аэродинамическое качество), а это снижает летно-тактические характеристики летательных аппаратов;
- нецелесообразность реализации внешней подвески для объектов больших весов и габаритов (крылатых ракет, снарядов, топливных баков и др. );
- рассредоточенная на ЛА арматура устройств подвески и запуска объектов повышает вес конструкции, снижает надежность ЛА и затрудняет его эксплуатацию.
Наиболее близким к предлагаемому является устройство, содержащее шахту, внутри которой установлена на направляющих платформа с замками-фиксаторами ее положения, емкости со сжатым газом, сообщенные с подплатформенным пространством через соленоид-редукционные клапаны и воздуховоды с ресивером, программные автоматы давления, блок бортовой цифровой вычислительной машины и датчики.
Недостаток указанного устройства заключается в том, что из-за больших давлений газа устройство имеет большой вес. Кроме того, устройство не позволяет производить установку и пуск широкого класса крылатых и баллистических ракет.
Целью изобретения является повышение надежности работы устройства, снижение веса конструкции и улучшение эксплуатационных характеристик.
Указанная цель достигается тем, что днище и платформа соединены между собой замкнутой гибкой герметичной стенкой, а направляющие закреплены на внутренней поверхности шахты и на них установлены на нескольких параллельно расположенных ярусах шахты замки-фиксаторы и демпферы-ограничители верхнего хода платформы. Кроме того, для равномерного распределения поля давления под платформой ресивер выполнен с калиброванными насадками и установлен на днище шахты.
При этом, с целью реализации оптимальной программы движения платформы с объектом в шахте с учетом воздействия возмущающих факторов, датчики ускорения платформы, датчики давления газа над платформой и под ней, программные автоматы давления и соленоид-редукционные клапаны закоммутированы обратной связью с блоком бортовой цифровой вычислительной машины.
Кроме того, с целью повышения надежности фиксации платформы в заданной позиции, в пазах направляющих на каждом ярусе установлены электроконтакты, закоммутированные с механизмом замков, а последние закоммутированы с демпферами-ограничителями верхнего хода платформы.
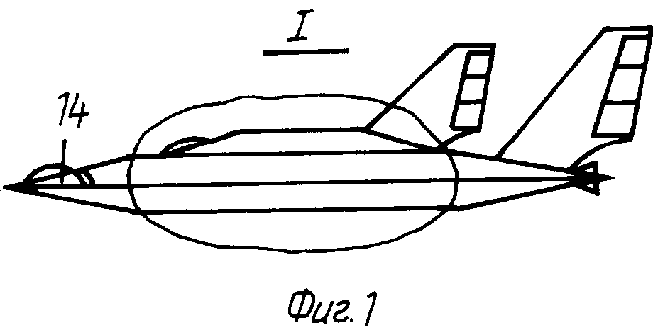
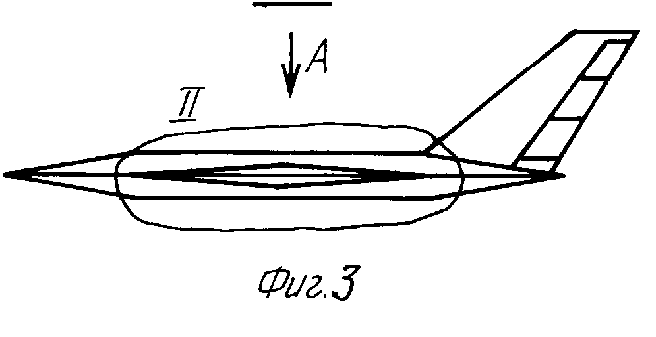
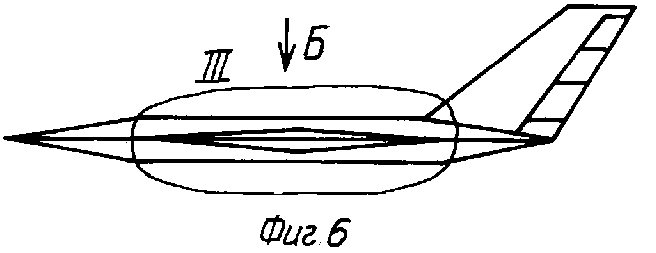
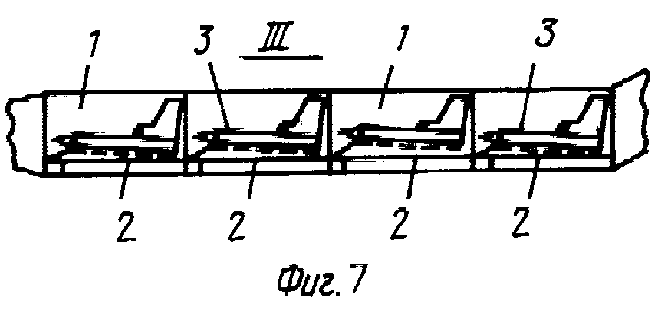
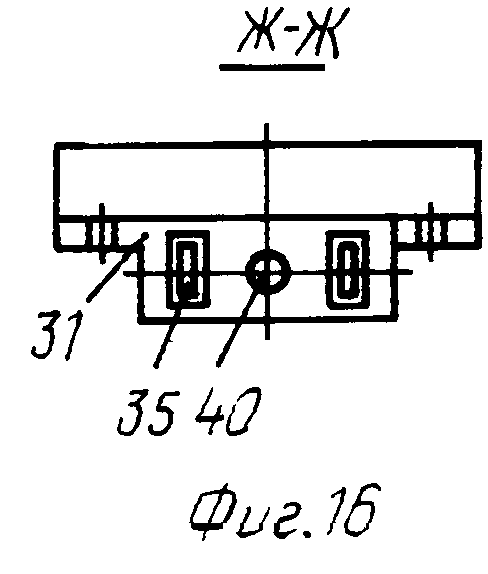
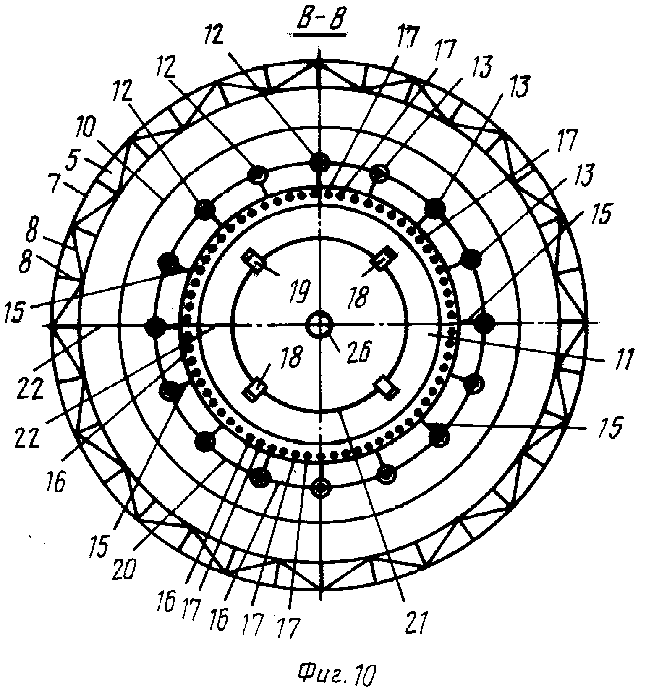
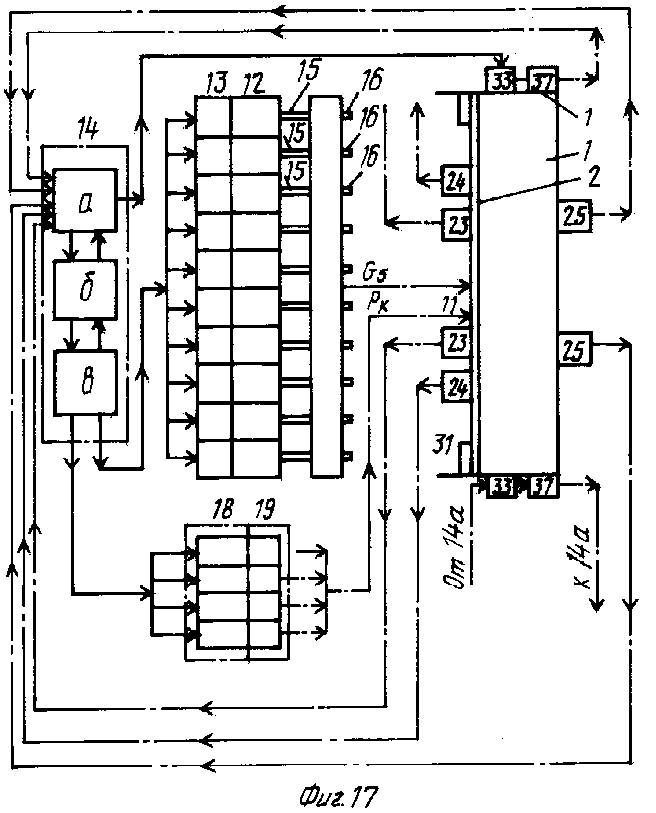
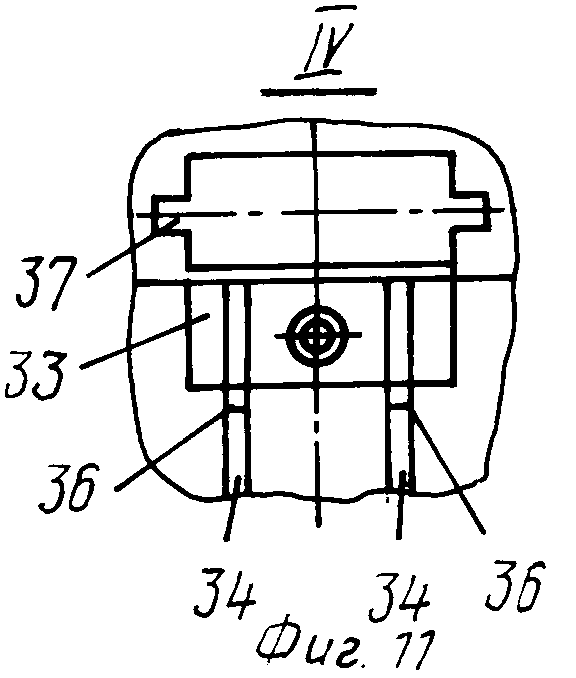
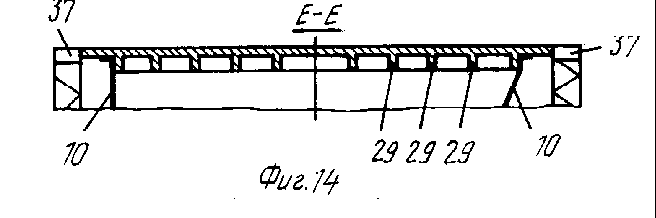
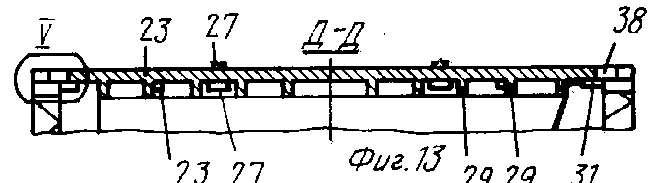
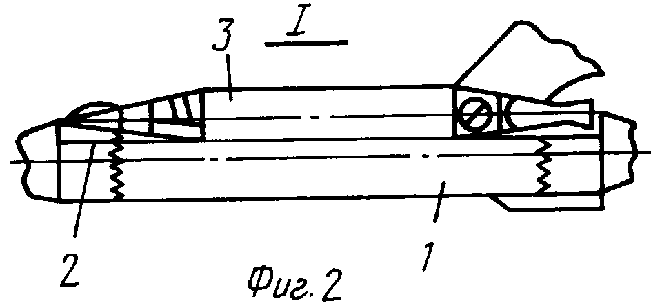
На фиг. 1 схематично изображена многоразовая воздушно-космическая система (МВКС-У), вид сбоку; на фиг. 2 - отсек полезной нагрузки (узел I на фиг. 1), вид сбоку; на фиг. 3 - летательный аппарат-носитель баллистических ракет, вид сбоку; на фиг. 4 - отсек полезной нагрузки, вид по стрелке А на фиг. 3; на фиг. 5 - отсек полезной нагрузки (узел II на фиг. 3), вид сбоку; на фиг. 6 - летательный аппарат-носитель крылатых ракет, вид сбоку; на фиг. 7 - отсек полезной нагрузки (узел III на фиг. 6), вид сбоку; на фиг. 8 - отсек полезной нагрузки, вид по стрелке Б на фиг. 6; на фиг. 9 - конструктивная схема шахты первой ступени МВКС-У с подвижной платформой и расположением ее позиций в шахте под различные варианты вторых ступеней, а также - основные конструктивные элементы, входящие в состав привода подвижной платформы; на фиг. 10 - разрез В-А на фиг. 9; на фиг. 11 - узел IV на фиг. 9; на фиг. 12 - разрез Г-Г на фиг. 9; на фиг. 13 - разрез Д-Д на фиг. 12; на фиг. 14 - разрез Е-Е на фиг. 12; на фиг. 15 - узел V на фиг. 13; на фиг. 16 - разрез Ж-Ж на фиг. 15; на фиг. 17 - блок-схема функциональных связей конструктивных элементов данного устройства.
Устройство, изображенное на фиг. 1 - 17, включает отсек 1 полезной нагрузки (шахту), при этом в зависимости от целевого назначения ЛА таких отсеков может быть несколько (см. фиг. 4-8). В отсеках 1 полезной нагрузки устанавливаются подвижные платформы 2, на которых установлены сами объекты 3 (вторые ступени МВКС-У, баллистические или крылатые ракеты и др. ).
В зависимости от компоновочной схемы объектов 3 они могут не закрываться сверху створками 4 (см. фиг. 1 и 2) или закрываться (см. фиг. 3-8), но открываться перед пуском ракет. Подвижные платформы выходят на исходные позиции для пуска с них ракет.
Описание данного устройства приведено на примере МВКС+У (см. фиг. 9-17), где в шахте 1 установлена платформа 2, на которой производится установка и крепление различных вариантов космических объектов 3 (вторых ступеней с полезной нагрузкой), при этом позиция (например, 1а-1а, 1б-1б, 1в-1в), старт для всех вариантов объектов производится с единой стартовой позиции II-II (см. фиг. 9).
Шахта 1 выполнена в центральной части первой ступени, где профиль корпуса-крыла имеет максимальную и постоянную толщину. Внешним диаметром шахты является силовое кольцо 5 (см. фиг. 9 и 10), которое включает соответственно внутреннюю силовую стенку 6 и внешнюю 7, которые соединены между собой элементами жесткости 8, например, ферменного типа. Снизу шахта закрыта герметичным днищем 9 высокой жесткости, которое крепится по контуру к силовому кольцу 5. В шахту 1 сверху заводится платформа 2, которая устанавливается в шахте в одно из положений (позиций), соответствующих вариант второй ступени (см. фиг. 9). Внутренняя поверхность платформы 2 связана с внутренней поверхностью днища 9 корпуса-крыла первой ступени посредством гибкой герметичной кольцевой стенки 10, которая закреплена на обеих указанных поверхностях, например, посредством клея (см. фиг. 9 и 10, фиг. 12-14), в результате чего образована замкнутая герметичная цилиндрическая камера 11, на днище которой установлены емкости 12 со сжатым воздухом (например, стандартные сферические баллоны с соленоид-редукционными клапанами 13, связанными с блоком БЦВМ 14 (см. фиг. 1 и 17), которые открывают (закрывают) выход сжатого воздуха из емкостей 12 и понижают давление воздуха до расчетного.
Соленоид-pедукционные клапаны соединены воздухопроводами 15 с кольцевым ресивером 16, где происходит предварительное расширение сжатого воздуха и сглаживание пульсаций давления и откуда воздух выходит во внутреннюю полость камеры 11 через калиброванные насадки 17 ресивера, создавая в соответствии с заданной программой расчетное избыточное давление под днищем платформы 2. Для поддержания программного перепада давлений на платформе 2 внутри камеры 11 установлены программные автоматы 18 давления с клапанами 19 перепуска воздуха (избыточного давления воздуха) в атмосферу (см. фиг. 10). Соленоид-редукционные клапаны 13 связаны между собой коммуникациями 20. С этой же целью (повышение надежности в эксплуатации) программные автоматы 18 давления связаны между собой коммуникациями 21. Коммуникации 20 и 21 связаны магистральным коммуниководом 22 с блоком БЦВМ 14, осуществляющим управление устройством (см. фиг. 1, 10, 17). Для контроля траектории движения (подъема - спуска) платформы 2, чтобы параметры траектории движения платформы не выходили за пределы допустимых, на ее внутренней стороне, под платформой, установлены датчики 23 ускорения и датчики 24 давления сжатого газа, а датчики 25 давления атмосферы установлены над платформой. Датчики 23,24 и 25 закоммутированы с магистральным коммуниководом 22, а через него - с блоком БЦВМ 14 (см. фиг. 10, 13 и 17).
В центре днища камеры 11 выполнен герметичный эксплуатационный люк 26, через который осуществляется доступ внутрь камеры 11 для проверки и осмотра оборудования и аппаратуры, входящих в состав устройства (см. фиг. 10).
С внешней стороны платформа 2 имеет ровную поверхность, где устанавливаются, центрируются и закрепляются с помощью унифицированных замков 27 различные варианты вторых ступеней.
Внутренняя поверхность платформы 2 для повышения ее прочности и жесткости имеет радиальные и кольцевые ребра жесткости 28 и 29 (см. фиг. 12-14).
Для фиксации платформы 2 в шахте 1 в соответствии с программным вариантом второй ступени платформа имеет силовые элементы 30, расположенные по осям Х и Z первой ступени МВКС-У, на концах которых установлены и закреплены элементы механизмов замков фиксации положения платформы 31. Ролики кареток этих замков движутся по направляющим 32, выполненным на внутренней силовой стенке 6 шахты 1 (см. фиг. 9 и 12).
Направляющие 32 имеют в центре плате, поверхность которого не выходит за пределы внутренней поверхности шахты и на котором в соответствии с программными позициями установлены замки механизма фиксации подвижной платформы 33, а по бокам плато выполнены пазы 34, по которым движутся ролики 35 кареток элементов механизма замков 31 (см. фиг. 9-16).
В целях своевременного и надежного срабатывания механизма замков фиксации подвижной платформы каретки роликов, поджимаемые пружинами, двигаясь по направляющим пазам, замыкают электроконтакты 36, что является сигналом для постановки подвижной платформы в этой позиции на замки, при этом каждой позиции подвижной платформы соответствует своя пара электроконтактов 36, Замки механизма фиксации платформы 33 закоммутированы с демпферами-ограничителями верхнего хода платформы 37, подвижные части которых 38 снимают существенную часть инерционной нагрузки, смягчают ее за счет аммортизации и воспринимают ее совместно с замками 33 на себя, замыкая усилия в конструкции на силовое кольцо 5 и ограничивая дальнейший ход платформы вверх, при этом штоки 39 замков 33 входят в гнезда 40 элементов замков 31, установленных на подвижной платформе 2, фиксируя таким образом соответствующее положение платформы (см. фиг. 10-16).
Спуск платформы из крайнего верхнего положения в нижнее исходное положение производится на земле при установке нового (следующего) варианта второй ступени, что осуществляется автоматически при включении на пульте блока БЦВМ 14, в кабине первой ступени МВКС-У, этого варианта.
Работа устройства характеризуется совокупностью следующих операций.
1. Включение блока БЦВМ 14, в состав которого входят:
подблок БЦВМ-а запоминания, хранения и выдачи исходных данных;
подблок БЦВМ-б с заложенным в нем алгоритмом расчета программы управления приводом подвижной платформы;
подблок БЦВМ-в перевода расчетных данных программы управления приводом подвижной платформы, поступающих из подблока БЦВМ-б в электроимпульсный код управления.
2. Включение на пульте управления варианта исходных данных объекта, установленного на платформе 2, при этом происходят:
ввод в память блока БЦВМ-а значения веса подвижной платформы со второй ступенью (варианта загрузки);
ввод в память блока БЦВМ-а по каналу системы управления составляющих перегрузки центра масс МВКС-У, которые входят в алгоритм расчета программы движения подвижной платформы;
ввод в память блока БЦВМ-а значения параметра полета (например, скорости полета), при достижении которого срабатывает механизм привода данного устройства;
включение датчиков ускорения движения подвижной платформы 23, датчиков давления газа под платформой 24 и датчиков давления атмосферы 25;
включение сигнализации положения замков механизма фиксации подвижной платформы.
При достижении заданного значения параметра полета выполняется следующая совокупность операций:
включаются соленоид-редукционные клапаны 13, которые понижают давление сжатого газа и открывают ему память по воздухопроводам 15 из емкостей со сжатым газом (баллонов) 12 в ресивер 16, откуда через равномерно установленные калиброванные насадки 17 сжатый газ выходит в замкнутую герметичную камеру 11 (под платформу);
включаются программные автоматы 18 давления, поддерживающие в замкнутой герметичной камере 11 заданное давление;
по показаниям датчиков 24 давления газа под платформой, датчиков 25 давления атмосферы над платформой и датчиков 23 ускорения платформы, закоммутированных обратной связью с блоком БКВМ, производится корректировка параметров траектории движения платформы путем регулирования расхода сжатого газа через ресивер и его давления в замкнутой герметичной камере;
в расчетный момент при подходе подвижной платформы к исходной (заданной) позиции, когда ролики 35 кареток механизма замков 31, установленных на платформе 2, набегают на электроконтакты 36, установленные в пазах направляющих 32, и замыкают их, подается команда на срабатывание замков механизма фиксации подвижной платформы 33 и связанных с ними демпферов-ограничителей верхнего хода платформы 37 в этом положении;
когда подвижная платформа встанет на замки в заданном положении, электросигнал об этот подается на пульт управления.
Выбранная конструктивная схема устройства обеспечивает ему следующие преимущества:
равномерное нагружение подвижной платформы аэродинамическими и массово-инерционными силами позволяет разработать легкую по весу и жесткую конструкцию платформы;
развитая поверхность подвижной платформы с образованием под ней замкнутой герметичной камеры позволяет использовать для привода платформы малые рабочие давления в камере (0,05-0,07 кг/см2) и небольшие расхода сжатого газа, что приводит к существенному снижению веса платформы и привода и улучшает условия эксплуатации устройства;
простота конструкции привода и подвижной платформы и отсутствие сложных, громоздких и тяжелых механизмов (в отличие от гидравлических, электромеханических и других приводов) обеспечивает высокую надежность устройства в эксплуатации;
несущая поверхность подвижной платформы с равномерным распределением поля давления по ее поверхности позволяет эффективно использовать ее высокие несущие свойства для установки на ней уникальных по весу и габаритам различных объектов авиационной, ракетной и космической техники;
эффективное использование в устройстве принципов автоматического регулирования основных параметров рабочего тела в замкнутой камере (давления и расхода сжатого газа) позволяет оптимизировать параметры траектории движения подвижной платформы (ускорение, скорость, время подъема в исходную позицию), а это снижает до минимума нагрузки на замки фиксации подвижной платформы, снижает вес привода и повышает надежность и универсальность применения устройства. (56) Техническая информация ОНТИ ЦАГИ N 4, 5, 1978.
Военный вестник, 1978, N 3, с. 120-122.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоразовая воздушно-космическая система | 1978 |
|
SU811679A1 |
| МНОГОРАЗОВАЯ ВОЗДУШНО-КОСМИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2164882C1 |
| СПОСОБ САМОНАВЕДЕНИЯ КРЫЛАТОЙ РАКЕТЫ | 2019 |
|
RU2723783C1 |
| СТАРТОВЫЙ КОМПЛЕКС ДЛЯ ПРЕДСТАРТОВОЙ ПОДГОТОВКИ И ПУСКА РАКЕТЫ-НОСИТЕЛЯ | 2022 |
|
RU2788838C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2008 |
|
RU2368542C1 |
| РАКЕТНО-СТАРТОВЫЙ КОМПЛЕКС С РАКЕТНО-КАТАПУЛЬТНЫМ АППАРАТОМ ДЛЯ ПОЛЕТОВ НА ЛУНУ И ОБРАТНО | 2020 |
|
RU2743061C1 |
| Способ и устройство для многократного вывода в космос и возвращения негабаритного груза и способ использования негабаритного груза на других планетах | 2012 |
|
RU2627902C2 |
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
| Многоразовая космическая система и способ ее управления | 2019 |
|
RU2717406C1 |
| СПОСОБ УДАЛЕНИЯ ОДНОГО ОБЪЕКТА ИЗ ДРУГОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2376207C2 |