1
Изобретение относится к подъемнь устройствам, и может быть использовано преимущественно для управления реверсивным электродвигателем строительного подъемника.
Известны электрические схемы автоматического управления лифтами с перекидными датчиками положения.
Такие схемы предусматривают пуск лифта посредством кнопок, установленных на этажах или смонтированных на панели в кабине лифта, а автоматический выбор направления движения кабины и остановку ее на требуемом этаже с помощью перекидных этажных переключателей, размещенных в шахте на каждом этаже .l .
Недостатком таких схем является установка в шахте на каждом этаже этажных перек.гаочателей, что создает неудобство обслуживания.
Известно устройство для реверсивным электродвигателем строительного подъемника, содержащее ходовой винт, кинематически связанный через вал нижнего отклоняющего блока и канатный барабан с элактродвигателем, переключающие упоры, установленные на- ходовом винте на .расстояниях, пропорциональных расстояниям между остановками платформы, и взаимодействующие с путевыми выключателями промежуточных установок, распо.г1оженными у ходового винта и 5 снабженными угловыми рычагами с роликами прямого и обратного хода электродвигателя и кнопками управления.
10 Недостаком такйго устройства является сложность управления электродвигателем подъемника.
Целью изобретения является упрощецке управления электродвигателем 5 подъемника.
Поставленная цель достигается тем, что контакты пуска и остановки каждого путевого выключателя,электрически связаны с контактами кнопок управления двух смежных остановок и катушками магнитного пускателя реверсивного электродвигателя.
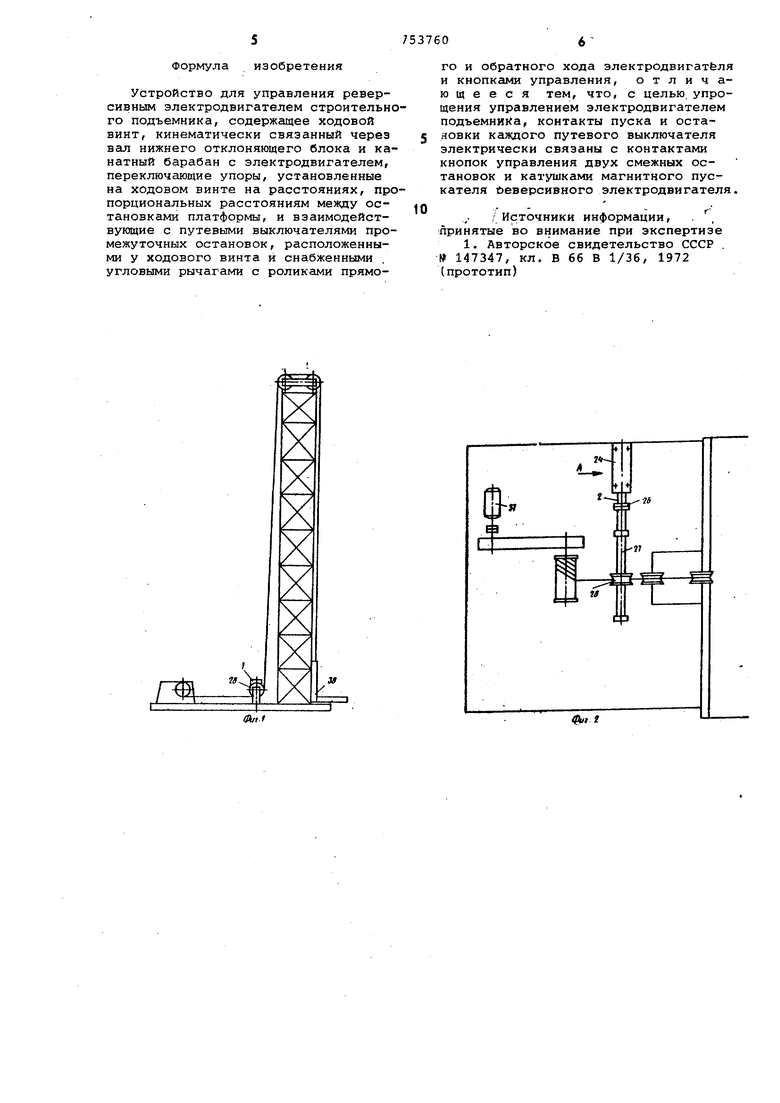
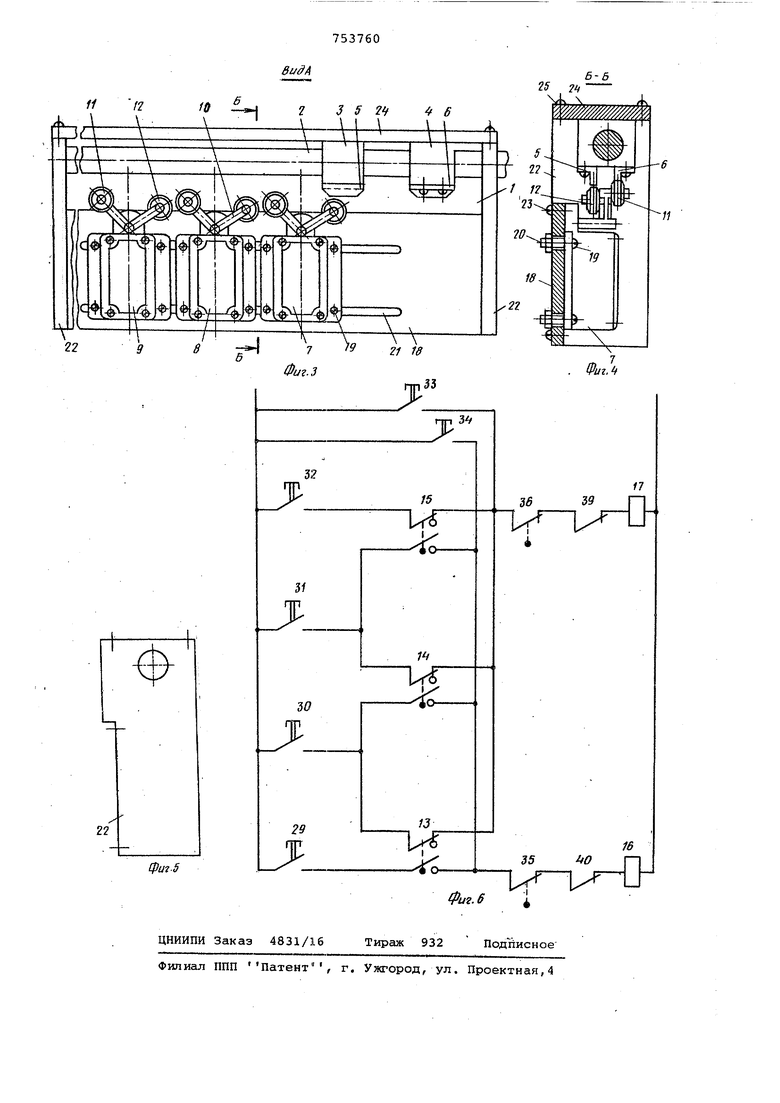
На фиг. 1 схематически изображен строительный подъемникf на фиг. 2 25 то же, вид сверху; на фиг. 3 - позиционно-согласующее устройство, вид А фиг. 2; на фиг. 4 поперечный разрез Б-Б фиг. 3} нл фиг. 5 - торцовая стенка; на фиг. 6 - принципиальная ЗЦ электрическая схема устройства.
Устройство для управления реверивным электродвигателем строителього подъемника содержит позиционноогласующее устройство 1, состоящее з ходового винта 2, гаек 3 и 4 с ереключающими упорами 5 и б соотетственно.
Вдоль винта 2 размещены путевые выключатели 7-9, снабженные угловыи рычагами 10 с роликами 11 прямого хода и 12 обратного хода.
Путевые выключатели 7-9 имеют по два механически связанных контакта 13-15 соответственно, и каждый из двух контактов в одном положении рычага 10 замкнут, а в другом положении разомкнут.
: Ролики 11, установленные на одной ступени рычагов 10, взаимодействуют с переключающим упором б и, замыкая контакты 13-15, включенные в цепь катушки 16 одного направления реверсивного магнитного пускателя, подготавливают эту цепь к включению подъемника вниз, а ролики 12, установленные на другой ступени рычагов 10, взаимодействуют с переключанядим упором 5 и, за1мыхая контакты 13-15, включенные в цепь катушки 17 другого направления, подготавливают цепь катушки 17 к включению подъемника вверх.
Выключатели 7-9 крепятся к планке 18 с помощью винтов 19 и гаек 20. Планка 18 имеет прорези 21, которые служат для изменения расстояния между путевыми выключателями 7-9, крепится к торцовым стенкам 22 с помощью винтов 23.
Планка 24, удержи в аклдая от проворачивания гайки 3 и 4, крепится к торцовым стенкам 22 посредством винтов 25.
Винт 2 кинематически связан с электроприводом через муфту 26 и может вращаться при вращении вала 27 нижнего отклоняющего ролика 28 грузовогО каната подъемника.
Кнопки управления 29-32 служат для адресования платформы подъемника на этажи.
Кнопки управления 33 и 34 предназначены для управления подъемником в случае необходимости работать б€;з позиционно-согласующего устройства 1. .
Конечные выключатели 35 и 36 предназначены для отключения электропривода 37 подъемника при переходе его платформы 38 через крайние рабочие положения и могут быть установлены как в позиционно-согласующем .устройстве, так и вне его.
В электрической цепи устройства .имеются блок-контакты 39, катущки 40 реверсивного магнитного пускатбгля. Путевые выключатели 7-9 устанавливаются на расстояниях, пропор
циональных расстояниям между оста HOBKaivm подъемника.
Устройство работает следующим образом.
Если, например, платформа подъ- емника находится в нижнем крайнем рабочем положении, т.е. на первом этаже, то рычаги 10 путевых выключателей 7-9 занимают положение, созданное после взаимодействия роликов 12 с переключающим упором 5 гайки 3, цепь катушки 17 реверсивного магнитного пускателя контактами 1315 подготовлена к выключению подъемника вверх, и гайки 3 и 4 находятся в одном из крайних положений, S соответствующем нижнему положению платформы подъемника.
Для адресования из этого положения платформы подъемника, например на третий этаж, нажимают на кнопку 0 управления 31.
При этом через контакты кнопки управления 31, замкнутые контакты 14 путевого выключателя 8, контакты выключателя 36, блок-контакты 39 с образуется цепь катушки 17 реверсивного магнитного пускателя, в результате чего срабатываегт магнитный пускатель, и включается электропривод подъемника для подъема платформы.
При подъеме платформы переключающие упоры 5 и 6 начинают перемещаться в сторону выключателя 9.
При движении переключающий упор 6 взаимодействует с роликом 11 путевого выключателя 7 и, проходя ми5 МО второго этажа, переключает его.
В результате этого контакты 13 в цепи катушки 17 размыкаются, а в цепи катушки 16 замы:каются.
При дальнейщем движении платфор0 мьа подъемника переключающий упор 6 в момент достижения платформой третьего этажа воздействует на ролик 11 путевого выключателя 8, и его конг такты 14 в цепи катушки 17 размыкаются, катушка 17 обесточивается, и платформа подъемника останавливается на третьем этаже.
i eгyлиpoвaниe точности остановки платформы в зависимости от расстояния между остановками произ-водится путем изменения расстояний между путевыми выключателями 7-9, а также изменением расстояния между переключающими упорами 5 и 6.
Введение в цепи кнопок управлеНИН двух.смежных остановок контактов пуска и остановки каждого путевого выключателя позволило использовать серийно изготовляемые отёчественной промышленностью путевые выключатели с угловы:ми рычагами, вследствие чего от;пала надобность в применении специального механизма сложной конструкции для удержания
переключателя в среднем положении.
Формула изобретения
Устройство для управления реверсивным электродвигателем строительного подъемника, содержащее ходовой винт, кинематически связанный через вал нижнего отклоняющего блока и канатный барабан с электродвигателем, переключающие упоры, установленные на ходовом винте на расстояниях, пропорциональных расстояниям между остановками платформы, и взаимодействующие с путевыми выключателями промежуточных остановок, расположенными у ходового винта и снабженными угловыми рычагами с роликами прямого и обратного хода электродвигателя и кнопками управления, отличающееся тем, что, с целью, упрощения управлением электродвигателем подъемника, контакты пуска и остановки каждого путевого выключателя электрически связаны с контактами кнопок управления двух смежных остановок и катушками магнитного пускателя Реверсивного электродвигателя.
г
/ Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР . 147347, кл. В 66 В 1/36, 1972 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Адресователь для управления строительных подъемников | 1972 |
|
SU447347A1 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1983 |
|
SU1175848A1 |
| Устройство для управления малогрузовым лифтом | 1986 |
|
SU1502450A1 |
| Адресователь грузового подъемника | 1982 |
|
SU1049397A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАРАЖНЫМ ПОДЪЕМНИКОМ | 1993 |
|
RU2080282C1 |
| ВЫЗЫВНАЯ СИГНАЛИЗАЦИЯ ПОДЪЕМНИКОВ | 1973 |
|
SU368164A1 |
| Адресователь грузового подъемника | 1983 |
|
SU1137048A1 |
| Адресовательстроительного подъемника | 1976 |
|
SU597623A1 |
| Приспособление к механизму для открывания рудничных вентиляционных дверей | 1937 |
|
SU57993A1 |
| Устройство для автоматического управления ширильной машиной отделочного агрегата | 1950 |
|
SU93839A1 |
Фиг1
3639
