(54) АВТОПОЕЗД
1
Изобретение относится к транспорту, а именно к автопоездам.
Известен автопоезд, состоящий из нескольких самоходных транспортных средств, соединенных между собой тягами 1.
Недостатком его является низкая маневрейность, обусловленная невозможностью обеспечения движения ведомого транспортного средства по колее ведущего при повороте.
Известен автопоезд, состоящий из соединенных между собой тягами самоходных транспортных средств, содержащий системы воздействия на органы управления последними 2.
Недостатком известного автопоезда является недостаточная маневренность, обусловленная невозможностью раздельного воздействия на рулевое управление ведущего и ведомого транспортного средства.
Цель изобретения - повышение маневренности путем обеспечения раздельного воздействия на органы управления ведущего и ведомого из каждой пары транспортных средств.
Это достигается тем, что каждая система воздействия на органы управления выполнена в виде жестко закрепленных на рамах транспортных средств обоим, в которых шарнирно установлены вертикальные валы с щарнирно установленными на них втулками, и щкивов, щарнирно установленных в стака, пах, жестко соединенных с концами упомянутых тяг и с размещенными внутри двумя горизонтальными осями, прикрепленными к упомянутым втулкам, причем вертикальные валы снабжены барабанами, а их верхние концы карданными передачами соединены
10 со шкивами, соединенными между собой тросом, при этом барабан, установленный на ведущем транспортном средстве, снабжен тормозом, управляемым пневмоцилиндром, и кинематически соединен с приводным двигателем.
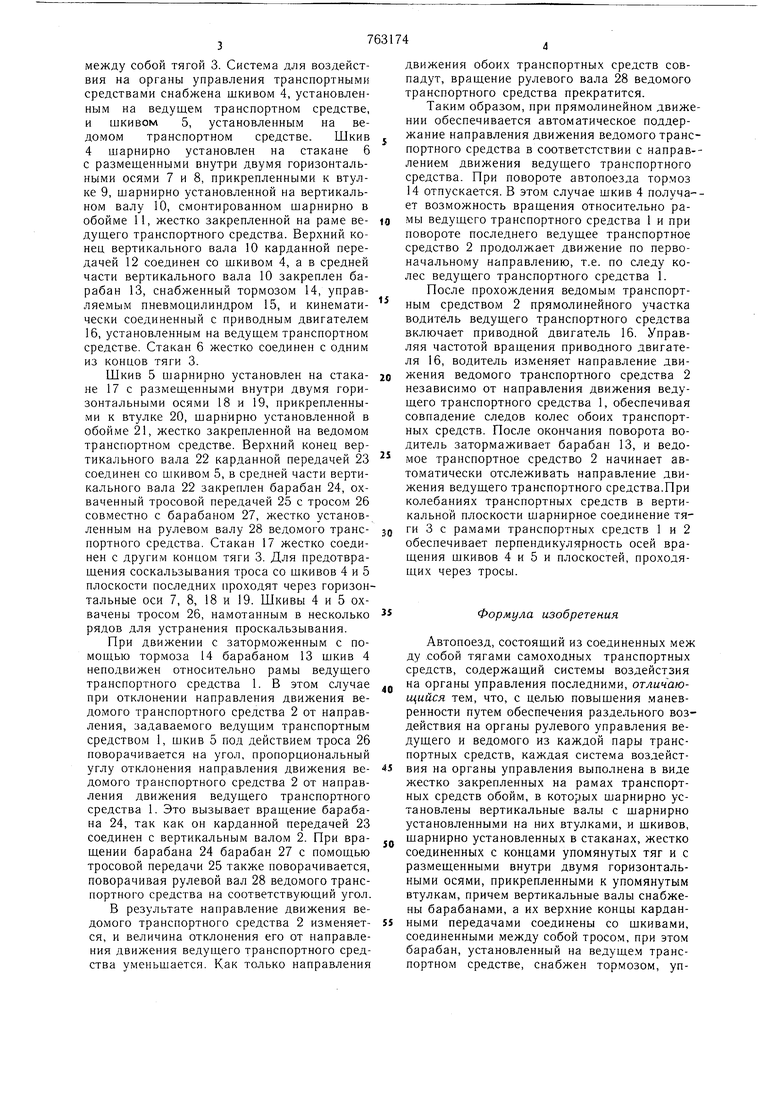
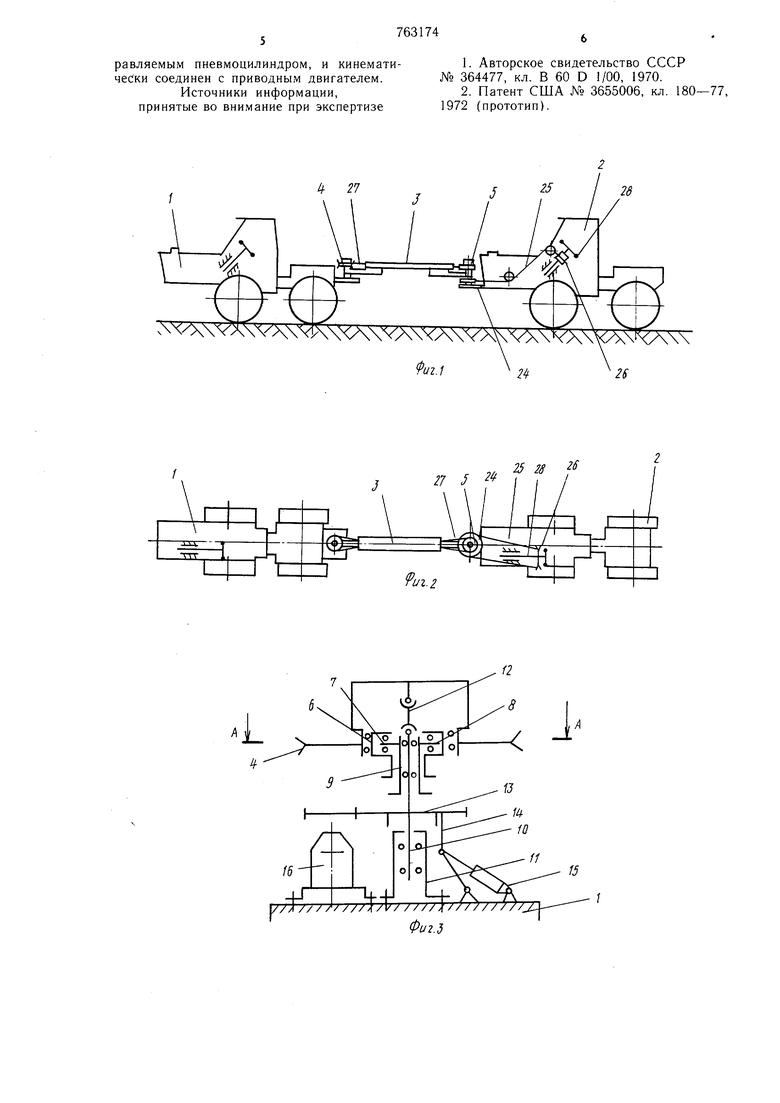
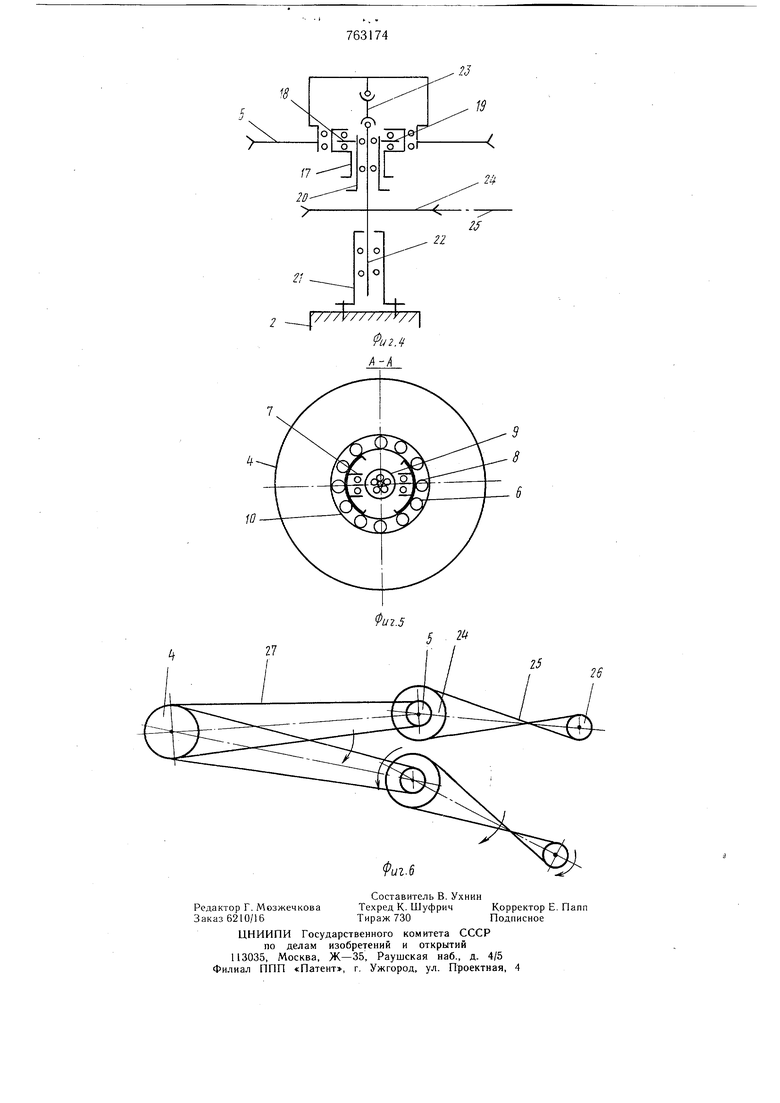
На фиг. 1 изображен автопоезд, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - вертикальный вал, установленный на ведущем транспортном средстве, общий вид; на фиг. 4 - то же, на ведомом транспортном средстве; на фиг. 5 - разрез А-А на фиг. 3; на фиг. 6 - кинематическая схема тросовой передачи.
Автопоезд состоит из ведущего 1 и ведомого 2 транспортного средства, соединенных между собой тягой 3. Система для воздействия на органы управления транспортными средствами снабжена шкивом 4, установленным на ведущем транспортном средстве, и шкивом 5, установленным на ведомом транспортном средстве. Шкив 4 шарнирно установлен на стакане 6 с размешенными внутри двумя горизонтальными осями 7 и 8, прикрепленными к втулке 9, шарнирно установленной на вертикальном валу 10, смонтированном шарнирно в обойме 11, жестко закрепленной на раме ведушего транспортного средства. Верхний конец вертикального вала 10 карданной передачей 12 соединен со шкивом 4, а в средней части вертикального вала 10 закреплен барабан 13, снабженный тормозом 14, управляемым пневмоцилиндром 15, и кинематически соединенный с приводным двигателем 16, установленным на ведушем транспортном средстве. Стакан 6 жестко соединен с одним из концов тяги 3. Шкив 5 шарнирно установлен на стакане 17 с размешенными внутри двумя горизонтальными осями 18 и 19, прикрепленными к втулке 20, шарнирно установленной в обойме 21, жестко закрепленной на ведомом транспортном средстве. Верхний конец вертикального вала 22 карданной передачей 23 соединен со шкивом 5, в средней части вертикального вала 22 закреплен барабан 24, охваченный тросовой передачей 25 с тросом 26 совместно с барабаном 27, жестко установленным на рулевом валу 28 ведомого транспортного средства. Стакан 17 жестко соединен с другим концом тяги 3. Для Предотвращения соскальзывания троса со шкивов 4 и 5 плоскости последних проходят через горизонтальные оси 7, 8, 18 и 19. Шкивы 4 и 5 охвачены тросом 26, намотанным в несколько рядов для устранения проскальзывания. При движении с заторможенным с помошью тормоза 14 барабаном 13 щкив 4 неподвижен относительно рамы ведущего транспортного средства 1. В этом случае при отклонении направления движения ведомого транспортного средства 2 от направления, задаваемого ведущим транспортным средством 1, шкив 5 под действием троса 26 поворачивается на угол, пропорциональный углу отклонения направления движения ведомого транспортного средства 2 от направления движения ведущего транспортного средства 1. Это вызывает вращение барабана 24, так как он карданной передачей 23 соединен с вертикальным валом 2. При вращении барабана 24 барабан 27 с помощью тросовой передачи 25 также поворачивается, поворачивая рулевой вал 28 ведомого транспортного средства на соответствующий угол. В результате направление движения ведомого транспортного средства 2 изменяется, и величина отклонения его от направления движения ведущего транспортного средства уменьшается. Как только направления движения обоих транспортных средств совпадут, вращение рулевого вала 28 ведомого транспортного средства прекратится. Таким образом, при прямолинейном движении обеспечивается автоматическое поддержание направления движения ведомого транспортного средства в соответстствии с направ-лением движения ведущего транспортного средства. При повороте автопоезда тормоз 14 отпускается. В этом случае шкив 4 получа-ет возможность вращения относительно рамы ведущего транспортного средства 1 и при повороте последнего ведущее транспортное средство 2 продолжает движение по первоначальному направлению, т.е. по следу колес ведущего транспортного средства 1. После прохождения ведомым транспортным средством 2 прямолинейного участка водитель ведущего транспортного средства включает приводной двигатель 16. Управляя частотой вращения приводного двигателя 16, водитель изменяет направление движения ведомого транспортного средства 2 независимо от направления движения ведущего транспортного средства 1, обеспечивая совпадение следов колес обоих транспортных средств. После окончания поворота водитель затормаживает барабан 13, и ведомое транспортное средство 2 начинает автоматически отслеживать направление движения ведущего транспортного средства.При колебаниях транспортных средств в вертикальной плоскости шарнирное соединение тяги 3 с рамами транспортных средств 1 и 2 обеспечивает перпендикулярность осей вращения шкивов 4 и 5 и плоскостей, проходящих через тросы. Формула изобретения Автопоезд, состоящий из соединенных меж ду .собой тягами самоходных транспортных средств, содержащий системы воздейстзия на органы управления последними, отличающийся тем, что, с целью повыщения .маневренности путем обеспечения раздельного воздействия на органы рулевого управления ведущего и ведомого из каждой пары транспортных средств, каждая система воздействия на органы управления выполнена в виде жестко закрепленных на рамах транспортных средств обойм, в которых шарнирно установлены вертикальные валы с шарнирно установленными на них втулками, и шкивов, шарнирно установленных в стаканах, жестко соединенных с концами упомянутых тяг и с размещенными внутри двумя горизонтальными осями, прикрепленными к упомянутым втулкам, причем вертикальные валы снабжены барабанами, а их верхние концы карданными передачами соединены со шкивами, соединенными между собой тросом, при этом барабан, установленный на ведуще.м транспортном средстве, снабжен тормозом, управляемым пневмоцилиндром, и кинематически соединен с приводным двигателем.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 364477, кл. В 60 D 1/00, 1970.
2.Патент США № 3655006, кл. 180-77, 1972 (прототип).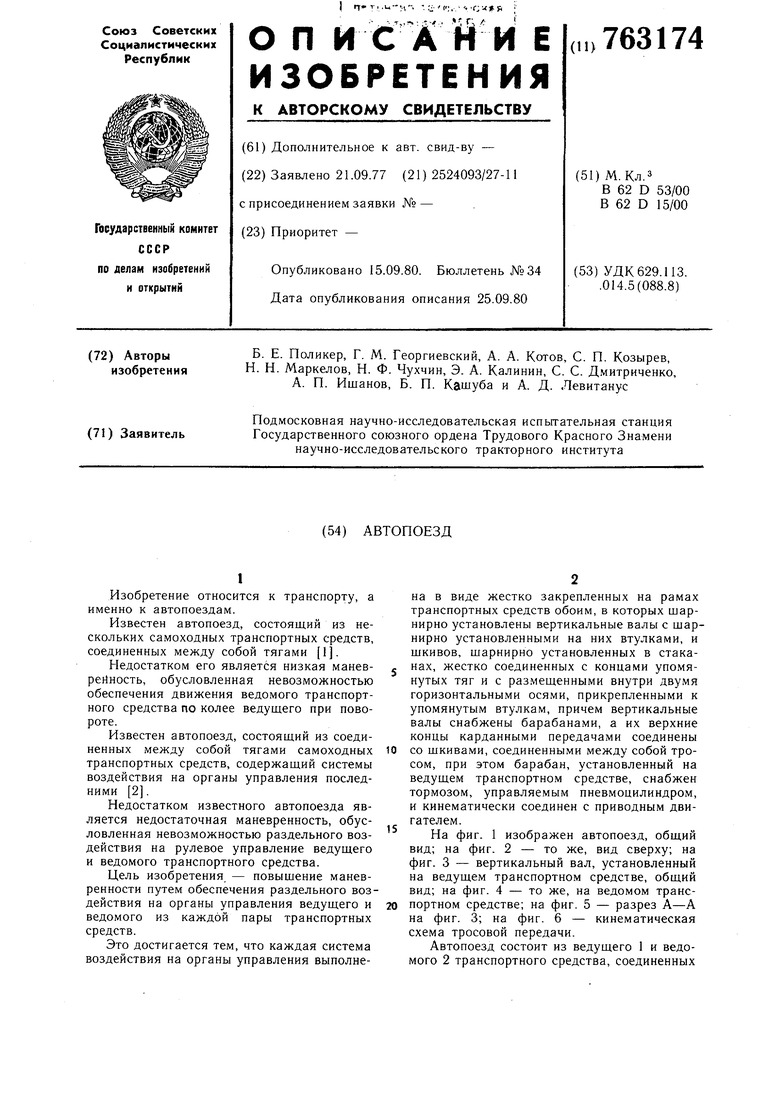
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРНАЯ ПОДВЕСКА | 2008 |
|
RU2385236C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| Веломобиль | 1990 |
|
SU1838171A3 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1976 |
|
SU671767A1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 2008 |
|
RU2379211C1 |
| Устройство для автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU648155A1 |
| ВЕЛОСИПЕД | 1992 |
|
RU2061614C1 |
. 25 28 27 J 2 2S I
