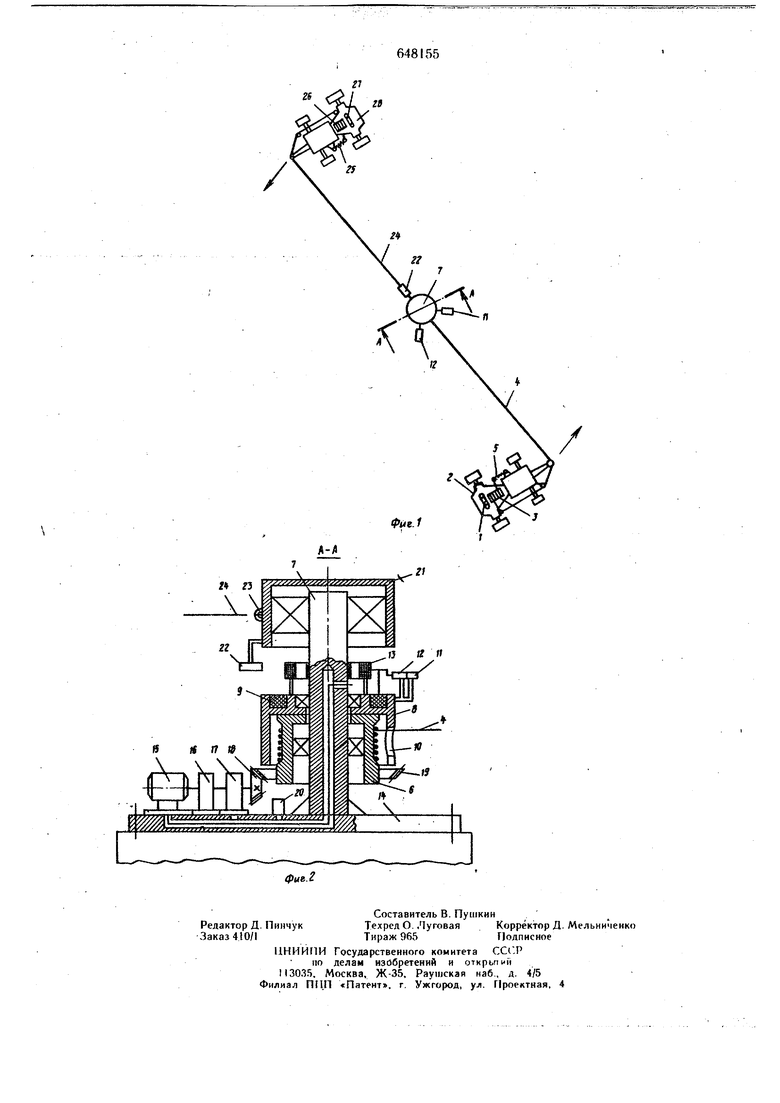
обмотки 9 электромагнита, а также вертикальная прорезь 10 для выхода троса 4. На кожухе закреплены датчики положения объектов: опережения 11 и отставания 12, а также подвижная часть 13 токосъемника, соединенная электрически с обмотками Ч электромагнита и датчиками П и 12. На плите 14 уложенной на полигоне, смонтирован реверсивный шаговый электродвигатель 15, соединенный через многоступенчатый редуктор 16 и электроуправляемую муфту 17 с ведущей шестерней 18, находящейся в зацеплении с ведомой шестерней 19, закрепленной на барабане, а. также управляющий блок 20, электрически связанный с реверсивным шаговым электродвигателем, электроуправляемой муфтой, токосъемником и датчиками И и 12. На якоре 7 шарнирно установлена втулка 21, на которой з;акр,еплен датчик 22 текущего положения объекта, расположенный между датчиками опережения и отставания с возможностью взаимодействия с ними. На втулке имеется проушина 23, в которой закреплен дополнительный трос 24, соединенный через систему блоков и упругий элемент 25 со шкивом 26, установленным на рулевом валу 27 другогоиспытываемого. трактора 28. „„ В исходном состоянии реверсивный шаговый электродвигатель 15 и Электроуправ-. ляемая муфта 17 обесточены, обмотки 9 электромагнита находятся под напряжением. В этом случае барабан 6 своей торцовой поверхностью прижат к кожуху 8 и вращается с ним как одно целое. Датчик 22 текущего положения находится между датчиками 11 и 12 опережения н отставания. Втулка 21 вращается на якоре 7. При проведении на одном полигоне испытаний одновременно двух тракторов скорости их двнженНя неизбежно будут различаться. В случае, если испытываемый трактор 2 будет двигаться с большей скоростью, чем трактор 28, произойдет взаимодейстйие датчика опережения П, установленного на кожухе 8, и датчика положения 22, установленного на втулке 21. В результате в управляющий блок 20 поступит командный сигнал, под действием которого обмотки 9 электромагннта будут обесточены, электроуправлЯемая муфта 17 обеспечит жесткое соединение выходного вала редуктора 16 с валом ведущей шестерни 18, а реверсивный электродвигатель 15 повернется на один шаг. Это приведет к сматыванию троса 4 с барабана 6, удалению трактора 2 на некоторое расстояние от якоря 7 и уменьшению его угловой скорости движения вокруг якоря. В результате датчик 22 выйдет из зоны взаимодействия с датчиком опереження 11, командный исчезнет, реверсивный электродвигатель 15 и электроуправляемая муфта 17 будут обесточены, а обмотки 9 электромагнита окажутся под напряжением. Барабан 6 своей торцовой поверхностью будет прижат к кожуху 8. Следовательно при увеличении окружной, скорости двгижения трактора 2 расстояние его от якоря 7 будет увеличиваться, что приведет к уменьшению его угловой скорости движения относительно якоря 7 и предотвращению столкновения тракторов. Аналогично при уменьшении окружной скорости трактора 2 произойдет взаимодействие датчика, отставания 12, установленного на кожухе 8, и датчика положения 22, установленного на втулке 21. В результате реверсивный шаговый двигатель 15 повернет барабан 6 на определенный угол в противоположную сторону. Длина троса 4 уменьшится, а угловая скорость движения трактоР 2 относительно якоря 7 увеличится, Таким образом, при сближении испытываемых тракторов будет автоматически изменяться длина троса 4, устраняя тем самым возможность столкновения тракторов. Величина угла поворота барабана 6 при отработке командного сигнала может регулироваться изменением шага электродвигателя 15 или передаточного числа редуктораШФормула изобретения . , устройство для автоматического вожде д тракторов при испытаниях на поли оне, включающее блок управления, подключенный к шаговому двигателю, и тросовую связь рулевого привода одного из тракторов с якорем, установленным в центре полигона, отлича ощееся тем, что, с целью исключения наезда при одновременном ис- пытании нескольких тракторов, оно имеет датчики положения объектов, а на якоре шарнирно установлены втулка и барабан с кожухом, в пазах которого размец1ены электромагниты, прн этом втулка через дополннтельный трос связана с рулевым приводом другого трактора, а бар.абан кинематически связан через электроуправляемую муфту с шаговым двигателем. 2. Устройство по п. 1, отличающееся тем, что датчнки положения объектов за-, креплены на втулке и кожухе барабана и подключенык блоку управления, Источники информации, принятые во вннмание при экспертизе 1. Авторское свидетельство СССР № 202605, кл. А 01 В 69/04, 1966. 2. Авторское свидетельство СССР № 246175, кл. А 01 В 69/04, 12.01.66.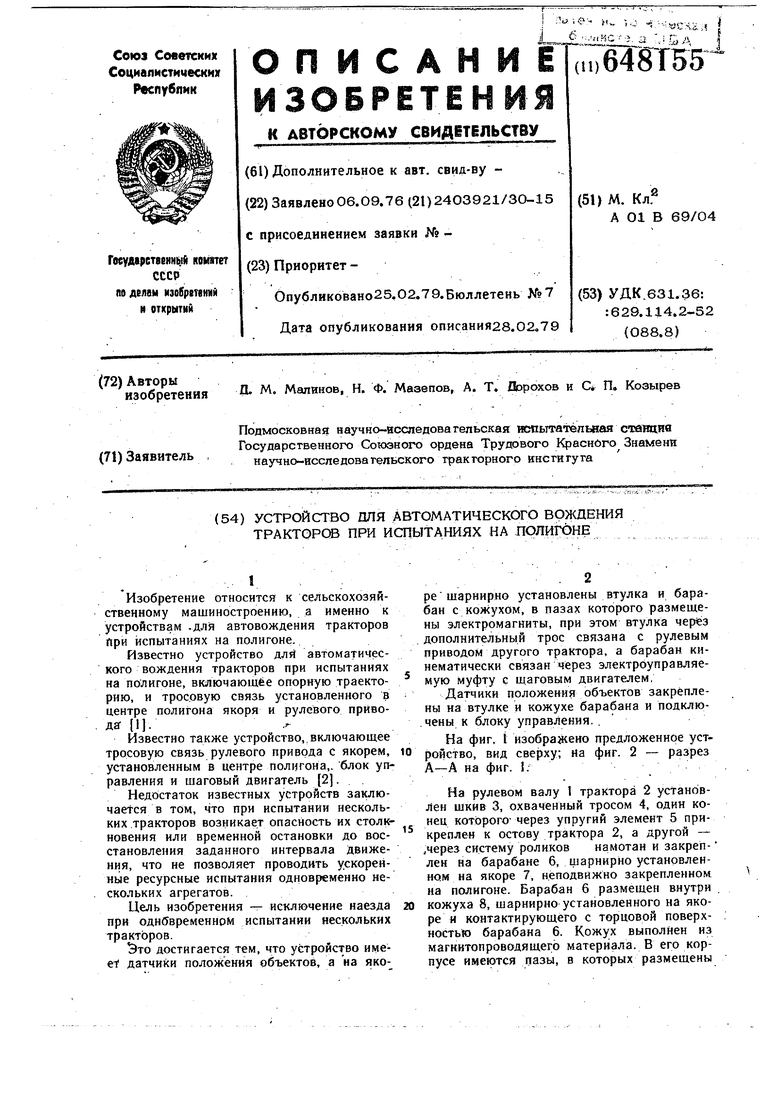
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения тракторов при испытании на треке | 1981 |
|
SU957781A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРАПО КРУГУ | 1969 |
|
SU246175A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2021924C1 |
| Устройство для загрузки трактора при испытаниях на полигоне | 1984 |
|
SU1173233A1 |
| ФОТООПТИЧЕСКИЙ ДАТЧИК ДЛЯ АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ЛЮБИЛЬКЫХ МАШИН | 1969 |
|
SU235436A1 |
| Противоугонное устройство транспортного средства | 1987 |
|
SU1516399A2 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1964 |
|
SU166226A1 |
| Устройство для ресурсных испытаний тракторов на полигоне | 1980 |
|
SU875238A1 |
| Устройство для контроля движения транспортного средства | 1986 |
|
SU1390621A1 |