Цель изобретения - повьошение точности остановки за счет предотвращения застревания электропривода до заданной точки остановки.
Постиёлёййая цель достигаётся тем, что в устройство для управления позиционным электроприводой, содержащее блок сравнения с подключенными к его входам задатчиком и датчиком положения, операционный усилитель, регулятор частоты вращения и блок задания частоты вращения, ведены два релейных элемента, реэистор, конденсатор и ключ, причем управляющие цепи релейных.элементов соединены с выходом блока сраёйёния, резистор, конденсатор и ключ порознь соответственно через замыкащий контакт, первый и второй разыкающие контакты первого релейного элемента включены в цепи обратной связи операционного усилителя, замыакнций контакт второго релейного элемента включен между выходом упоянуто о усилителя и регулятором астоты вращения, его размыкающий онтакт - между блоком задания частоы вращения и регулятором частоты ращения, а цепь управления ключа оединена с датчиком положения.
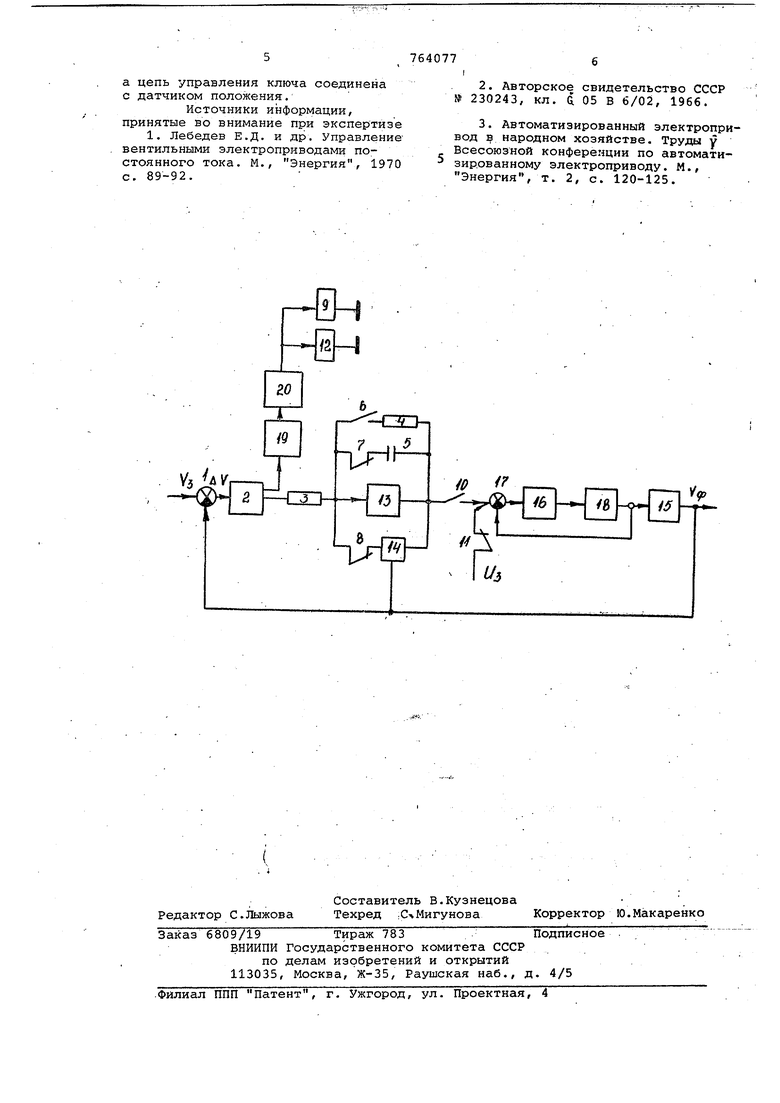
На чертеже представлена структурная схема устройства для управления позиционным электроприводом.
Устройство для управления позиционным электроприводом содержит блок 1,сравнения, цифроаналоговый преобразователь 2, резисторы 3 и 4, конденсатор 5, контакты 6-8 релейного элемента 9 и контакты 10 и 11 релейного элемента 12, операцио1 ный усилитель 13, в цепь обратной связи которого включен ключ 14, соединенный с датчиком 15 положения. Система управления содержит также регулятор 16 частоты вращения с сумматором 17 на входе, к которому подключен выход датчика частоты вращения электродвигателя 18. Релейные элементы 9 и 12 подключены, к преобразователю 2 через дешифратор 19 и усилитель 20.,
Ё режиме торможения от рабочей скорости, соответствующей сигналу заданного напряжения (Ue,) , контакт 10 релейного элемента 12 в результатё срабатыванйя рёлёЙного элёмента 12 при определённой вёШчйнё рассогласования (). равной разности заданного и фактического положения, замыкается.
Контакты релейногЬ элемента 9 перекидываются, размыкаются контакты 7 и 8, а контакт 6 залслкается. При этьм напряжение с преобраэрватёля 2/ в качестве которого применен цифроаналоговый преобразователь с яяней нрй характеристикой, через ре(эйстор 3 подаётея на операционный
усилитель 13, работающий в режиме повторителя.
Вбли,зи точки остановки, определяемой технологической особенностью рабочего механизма, отпадает релейный элемент 9, размыкается контакт 7 при закрытом, ключе 14, операционный усилитель 13 переходит в режим интегрирования.
Нарастающее напряжение на выхо:Де операционного усилителя 13 обуславливает рост напряжения на якоре электродвигателя 18.
При открытом ключе 14 происходит сброс до нуля напряжения на выходе операцйонного усилителя 13.
Ключ 14 закрывается при отсутсогвии импульсов от датчика 15 положения рабочего механизма и открываетс.я при появлении переднего фронта этих импульсов.
Выходным напряжением операционного усилителя 13, работающего в интегральном режиме, пилообразной формы определяется, скорость движения рабочего механизма. Ширина зубЦа пилы зависит от частоты импульсов датчика 15 положения рабочего механизма, что обеспечивает работу электродвигателя 18 до полной отработки задания (), определяквдего перемещение; механизма с
определенной скоростью До точной остановки.
При использовании операционного усилителя и ключа повышается точность, что в свою очередь способствует улучшению технологических показателей установки.
Формула изобретения
Устройство для управления позиционным электроприводом, содержащее блок сравнения с подключенными к еговходам задатчиком и датчиком
положения, операционный усилитель, регулятор частоты вращения и блок задания частоты вращения, отличающее ся тем, что, с целью повышения точности остановки, в него введены два релейных элемента, резистор, конденсатор и ключ, причем управляющие цепи релейных элементов соединены с выходом блока сравнения, резистор, конденсатор и ключ порознь соответственно через замыкающий контакт, первый и второй размыкающие контакты первого релейного элемента включены в цепи обратной связи операционного усилителя, замыкающий контакт втоRoro релейного элемента включен Между выходом упомянутого усилителя и регулятором частоты вращейия, его размыкающий контакт - между блоком задания частоты вращерия и регулятором частоты вращения.
а цепь управления ключа соединена с датчиком положения.
Источники информации, принятые во внимание при экспертизе 1. Лебедев Е.Д. и др. Управлениевентильными электроприводами постоянного тока. М., Энергия, 1970 с. 89-92.
2.Авторское свидетельство СССР № 230243, кл. d 05 В 6/02, 1966.
3.Автоматизированный электропривод народном хозяйстве. Труды у
Всесоюзной конференции по автоматизир.ованному электроприводу. М., Энергия, т. 2, с. 120-125.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления позиционным электроприводом | 1981 |
|
SU1053249A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1984 |
|
SU1328913A1 |
| Электропривод переменного тока | 1984 |
|
SU1164853A1 |
| Электропривод с адаптивным регулятором скорости | 1988 |
|
SU1541749A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Электропривод | 1987 |
|
SU1427542A1 |
