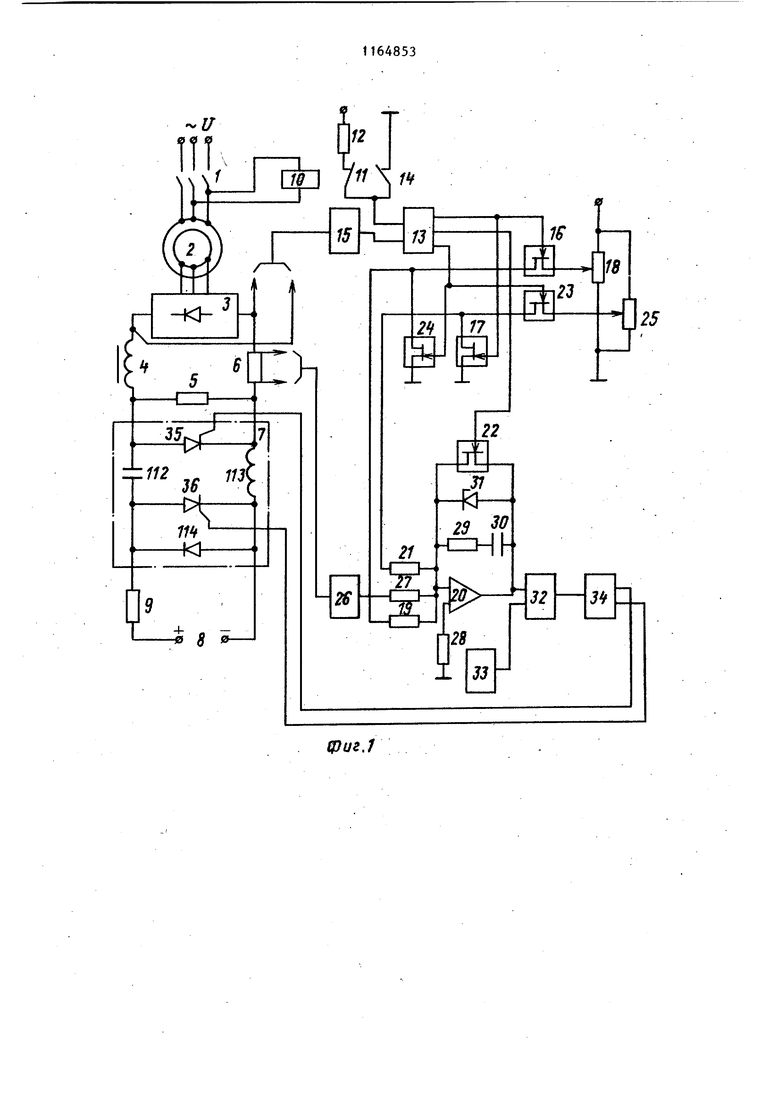
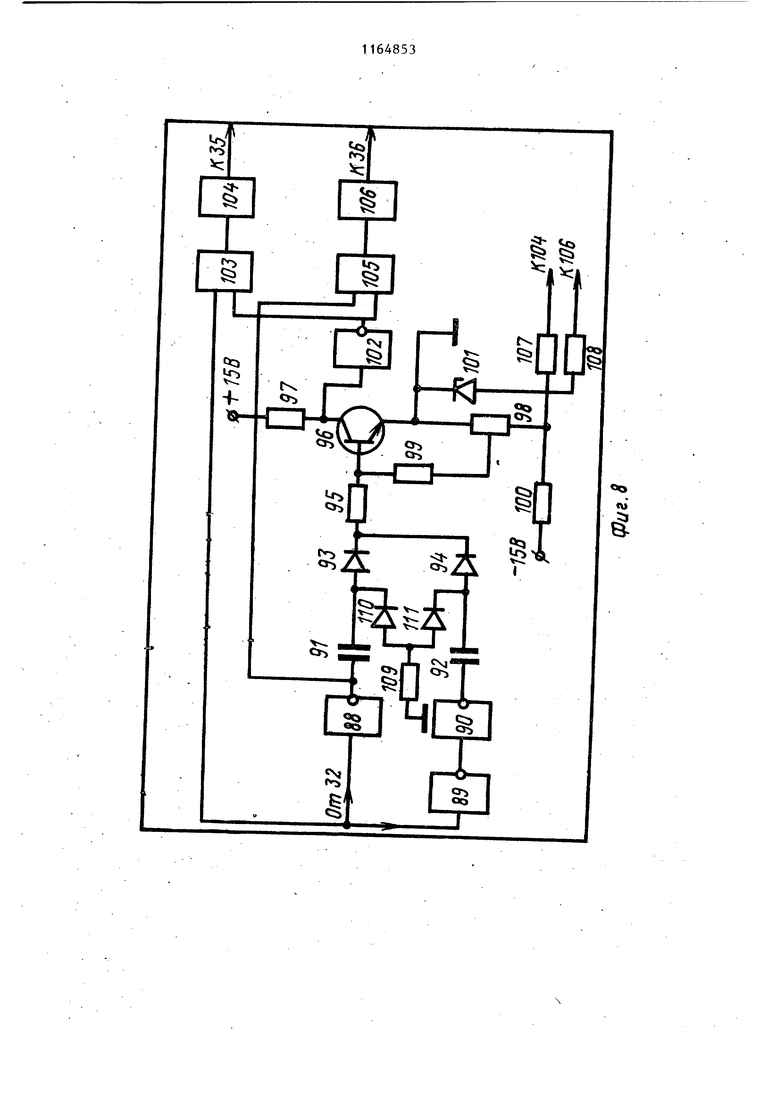
1,1 Изобретение относится к электротехнике и может быть использовано в электроприводах производственных механизмов при необходимости поддержания постоянного крутящего моме::та на валу, в частности в электропгиводах намоточного аппарата волочильного стана, особенно для намотки на шпулю тонкой проволоки. Цель изобретения - снижение динамических нагрузок и повышение за счет этого качества технологического процесса намотки. На фиг.1 приведена принципиальная электрическая схема устройства для управления асинхронным электроприводом намоточного аппарата волочильного стана; на фиг.2 - механические характеристики асинхронного электропривода; на фиг.З - принг.ипиальная схема датчика напряжения на фиг.4 принципиальная схема блока управления; на фиг,5 - блок-схема датчика тока; на фиг.6 - принципиальная схема включения компаратора; на фиг.7 принципиальная схема генератора пилообразного напряжения-, на фиг.З принципиальная схема формирователя импульсов управления тиристорами управляемого тиристорного коммутатора; на фиг.9 - принципиальная схема управляемого тиристорного коммутатора. Устройство для управления асинхронным двигателем с фазным ротором содержит коммутирующий аппарат 1 в цепи статора асинхронного двигателя 2 с фазным ротором, В цепь ротора включен вьтрямитель 3, выполнеиньш, например, по трехфазной мостовой схе ме Ларионова на диодах. На зажимы выпрямителя 3 через сглаживающий дроссель Л включен в качестве регули руемого добавочного сопротивления ре зистор 5. Шунт 6, включен последова тельно с резистором 5 на выходе выпрямителя 3. Параллельно резистору 5 присоединен силовой вход управляемого тиристорного коммутатора 7, к выходу которого подключен источник постоянного напряжения 8 через токоограничивающий резистор 9. Параллельно линейным зажимам статора асинхронного двигателя 2 включе на катушка электромагнитного реле 10,55 размыкагаций контакт 11 которого присоединен через резистор 12 к источнику постоянного напряжения и к первому 53 входу блока 13 управления. Замыкающий контакт 14 включен между общей точкой нулевого потенциала и первым входом блока 13 управления. Датчик 15 напряжения входом соединен с зажимами выхода выпрямителя 3. Выход датчика 15 напряжения соединен с вторым входом блока 13 управления, первый выход которого соединен с управляющими входами ключей 16 и 17. Ключ 16 включен между движком потенциометра 18 задания на пуск двигателя и резистором19, включенным на инвертирующий вход-пропорциональноинтегрального регулятора (ПИ-регулятора) 20. Ключ 17 включен между резистором 21, включенным на инвертирующий вход пи-регулятора 20 общей точкой нулевого потенциала. Второй выход блока 13 управления соединен с управляющим входом ключа 22, включенного параллельно цепи обратной связи пи-регулятора 20. Третий выход блока 13 управления соединен с управляющими входами ключей 23 и 24. Ключ 23 включен между движком потенциометра 25 задания на режим намотки проволоки и резистором 21, включенным на инвертирующий вход ПИ-регулятора 20. Ключ 24 включен между резистором 19, включенным на инвертирующий вход пи-регулятора 20, и общей точкой нулевого потенциала. Выходные клеммы шунта 6 присоединены к входу датчика 26 тока, выход которого соединен через резистор 27 с инвертирующим входом ПИ-регулятора 20. С этим же входом соединен через ключ 16 и резистор 19 движок потенциометра 18 и через ключ 23 и резистор 21 движок потенциометра 25. Неинвертирующий вход пи-регулятора 20 через резистор 28. соединен с общей точкой нулевого потенциала. В цепи обратной связи пи-регулятора 20 включены последовательно соедине.шые резистор 29 и конденсатор 30, параллельно которым подключен стабилитрон 31. Выход пи-регулятора 20 соединен с инвертируюпшм входом компаратора 32, неинвертирующий вход которого соединен с выходом генератора 33 пилообразного напряжения. Выход компаратора 32 подключен к входу формирователя 34 импульсов управления тиристорами, выходы которого соединены с управляющими электродами тиристоров 35 и 36 управляемого тиристорного коммутатора 7. На фиг.2 приведены механические характеристики ш(М) асинхронного электропривода (фиг.2), где по оси абсцисс откладьшается электромагнитный вращающий момент двигателя М, по оси ординат скорость вращения двигателя w. Механические характеристики 37 и 38 являются граничными при пуске электропривода, характерис тика 37 является начальной, а характеристика 38 - конечной. Все остальные характеристики реостатного управ ления пуском, соответствующие уменьшению сопротивления резистора 5, располагаются между характеристикой 37, когда сопротивление резистора 5 максимально при пускеj и ,между характеристикой 38, когда сопротивление резистора 5 ранно нулю. Механические характеристики 39 и 40 являют ся граничными при режиме намотки про волоки на шпулю. Характеристика 39 является начальной и соответствует началу намотки и минимальному сопротивлению резистора 5. Характеристика 40 является конечной, соответствует окончанию режима намотки и максималь ному сопротивлению резистора 5 при режиме намотки. При намотке и перехо де от характеристики 39 к характерис тике 40 все множество существующих характеристик занимает промежуточное положение.. Датчик 1.5 напряжения (фиг.З) содержит элемент сравнения напряжения на потенциометре 41, который соедине через вентиль 42 с выходом выпрямите ля 3 и с источником 43 напряжения за Дания на переключение с конечной характеристики при пуске 38 на начальную при режиме намотки 39 через вентиль 44 и резистор 45. Зажимы резистора 45 через вентиль 46 и резистор 47 соединены с управляющим входом оптронного ключа 48, который подключен к параметрическому стабилизатору напряжения, например, 3 В, состоящему из резистора 49 и стабилитрона 50, включенного параллельно с конден сатором 51, На фиг.4 приведена принципиальная схема блока 13 управления, который управляет работой бесконтактных ключей 16, 17, 22, 23 и 24 и позволяет автоматически выбирать необходимый режим работы электропривода, в том числе и режим намотки, и содержит преобразователь 52 напряжения низкого уровня в высокий, например с 5 до 15 В. Вход преобразователя 52 напряжения низкого уровня соединен с выходом датчика 15 напряжения, а выход с входом элемента НЕ 53. Выход элемента 53 включен на первьй вход элемента ИЛИ-НЕ 54, выход которого соединен с входом второго элемента ИЛИ-НЕ 55. На второй вход элемента 55 и на вход элемента НЕ 56 присоединены размыкающий контакт 11 и замыкающий контакт 14 электромагнитного реле 10. Выход элемента 55 соединен с вторым входом элемента 54, входом элемента НЕ 57 и входом преобразователя 58 напряжения высокого уровня в низкий, например с 15 до 5 В. Выход преобразователя 58 напряжения соединен с входами ключей 16 и 17. Выход элемента НЕ 56 соединен с входом преобразователя 59 напряжения высокого уровня в низкий. Выход преобразо вателя 59 напряжения соединен с управляющим входом ключа 22. Выход элемента 57 подан на вход третьего преобразователя 60 напряжения высокого уровня в низкий. Выход преобразователя 60 подан на управляющие входы ключей 23 и 24, Между выходами преобразователей 58, 59 и 60 напряжения и источником постоянного напряжения (+5В) включены резисторы 61, 62 и 63 для согласования выходов преобразователей 58, 59 и 60 напряжения и ключей 16, 17, 22, 23 и 24. Датчик 26 тока (фиг.5) содержит модулятор 64, вход которого соединен с шунтом 6, а выход присоединен к входу потенциального разделителя 65. Выход потенциального разделителя 65 присоединен к входу усилителя 66, выход которого соединен с входом демодулятора 67. Выход демодулятора 67 соединен с входом усилителя 68, выход которого образует выход датчика 26 и соединен с резистором 27 на инвертирующем входе ПИ-регулятора 20. Выход генератора 69 коммутирукяцего сигнала соединен с вторыми входами модулятора 64 и демодулятора 67 соответственно. Компаратор 32 (фиг.6) выполнен на операционном усилителе.70 с источником 71 питания. Во входных цепях компаратора 32 включены резисторы 12 и 73, на выходы - резисторы 74, 75 и ДИОД 76. Для коррекции работы операционного усилителя 70 служит конденсатор 77, подключенный на его корре тирующие входы. Генератор 33 пилообразного напря жения (фиг.7), предназначенный для получения опорного пилообразного на прйжения, например, с частотой ,500 Гц,, содержит операционный уснли тель 78 с источником 71 питания. Во входных цепях усилителя 78 включены резисторы 79 и 80, а в цепи обратной связи - однопереходной транзистор 81 через конденсатор 82 и резис тор 83. Потенциометр 84 и резистор 85 предназначены для изменения частоты выходного пилообразного напряжения. Для коррекции работы усилителя 78 и- согласования входа к его корректи рующему входу и выходу подключены соответственно конденсатор 86 и резистор 87. Формирователь 34 импульсов управления тиристорами управляемого тиристорного коммутатора 7 (фиг.8) содержит два инвертирующих элемента НЕ 88 и 89, входы которых соединены с выходом компаратора 32. Выход инвертирующего элемента НЕ 89 соединен с входом инвертирующего элемента 90 для более устойчивой работы формирователя импульсов управления. Выходы элементов 88 и 90 через конденсаторы 91 и 92 .соответственно, вентили 93 и 94 соединены с резистором 95 в цепи базы транзис тора 96, являющегося усилителем. В цепи коллектора транзистора 96 вклю чен резистор 97, в цепи эмиттер-база - потенциометр 98. Для смещения между базой и движком потенциометра 98 включен резистор 99. Потенциомет ,98 подключен к параметрическому стабилизатору напряжения, состоящему из резистора 100 и стабилитрона 101. Коллектор транзистора 96 соедине с входом инвертирующего элемента 102. Выходы компаратора 32 и элемен та 102. подключены к входам элемента И 103, выход которого подключен на вход усилителя 104 мощности. Выходы элементов 88 и 102 подклю чены к входам второго элемента И 105 выход которого подключен на вход второго усилителя 106 мощности. Для подачи отрицательного смещения на 1 36 базы усилителей 104 и 106 мощности служат резисторы 107 и 108. Между общей точкой нулевого потенциала и конденсаторами 91 и 92 через резистор 109 включены соответственно вентили 110 и 111. Выходы усилителей мощности 104 и 106 подключены к управляющим электродам тиристоров 35 и 36 управляемого тиристорнего коммутатора 7 (фиг.7), который содержит основной тиристор 35, подключенный параллельно резистору 5 в цепи ротора (фиг.1), и узел искусственной коммутации, который со.стоит из вспомогательного тиристора 36, подключенного анодом через коммутирукнций конденсатор 112 к аноду тиристора 35, а катодом через дроссель 113 - к катоду тиристора 35. Параллельно тиристору 36 в обратном направлении подключен диод 114. Устройство для управления асинхронным двигателем с фазным ротором работает следующим образом. При включении коммутирующего аппарата 1 (фиг.1) начинается разгон асинхронного двигателя 2 с фазным ротором с заданным и постоянным по величине пусковым моментом Mj const от начальной.механической характеристики 37 к конечной 38 (фиг.2)-. После включения коммутирующего аппарата 1 на выходе датчика 15 напряжения (фиг.1 и 3) вместо логической 1 появляется логический О, одновременно включается электромагнитное реле 10. При этом замыкается контакт 14 реле и размыкается контакт 11 (фиг.1). На обоих входах блока управления 13 появляются сигналы логического О (фиг.4). На первом выходе логического устройства 13 управления возникает единичный сигнал, на втором и третьем- нулевые. Единичным сигналом с первого выхода блока 13 замыкаются ключи 16 и 17 (фиг.1). С потенциометра 18 на инвертирующий вход пи-регулятора 20 через резистор 19 подан сигнал задания на пусковой момент асинхронного двигателя 2. Сигнал отрицательной обратной связи по выпрямленному току ротора снимается с шунта 6,усиливается датчиком 26 тока и подается на инвертирукнций вход ПИрегулятора 20 через резистор 27. Положение движка потенциометра 18 определяет величину пускового момента, с
которым происходит разгон асинхронного двигателя 2. Выбор величины пускового момента производится из условия исключения петлеобразования, обрывов проволоки и удовлетворительной укладки первых витков проволоки на шпулю без проскальзьшания.
Ключ 17 подключает резистор 21 на входе пи-регулятора 20 к общей точке Нулевые сигналы второго и третьего выходов блока 13 управления обеспечивают размыкание ключей 22, 23 и 24. Ключом 23 размыкается цепь задания а второго потенциометра 25, ключом 24 размыкается цепь соединения резистоipa 19 с общей точкой, и при размыкании ключа 22 включается цепь обратной связи пи-регулятора 20.
Напряжение управления с выхода пи-регулятора 20 поступает на инвертирующий вход компаратора 32, на другой вход которого подается опорное пилообразное напряжение от генератора 33. С выхода компаратора 32 (фиг.1 и 6) после вентиля 76 (фиг.6) периодический сигнал прямоугольной формы и положительной полярности поступает в схему формирователя 34 импульсов управления (фиг.1 и 8) тиристорами 35 и 36 (фиг.1 и 9) управляемого тиристорного коммутатора 7. Величина напряжения управления и определяет скважность работы тиристора 35 (фиг.9) и соответственно величину регулируемого сопротивления резистора 5 в цепи ротора.
При разгоне асинхронного двигателя 2 для поддержания постоянства выпрямленного тока ротора и момента уменьшается сопротивление в цепи ротора за счет увеличения скважности работы тиристора 35.
По окончании разгона привода до скорости, величина которой выбирается положением движка потенциометра 41 в схеме сравнения датчика 15 напряжения (фиг.1 и 3), напряжение на выходе выпрямителя 3 становится по величине меньше напряжения задания источника 43. На резисторе 45 (фиг.3 появляется напряжение, которое подается на вход оптронного ключа 48, в результате этого на выходе датчика 15 напряжения (фиг.1 и 3) появляется единичный сигнал, который поступает на второй вход логического устройства 13 управления (фиг.1 и 4). На первом выходе блока 13 вместо единичног
сигнала появляется нулевой сигнал, на втором выходе сохраняется нулевой сигнал, на третьем вместо нулевого появляется единичный сигнал (фиг.4). Нулевой сигнал с первого выхода блока 13 обеспечивает размыкание ключей 16 и 17, единичныйсигнал с третьего выхода блока 13 - замыкание ключей 23 и 24 (фиг.1 и 4). В результате от пи-регулятора 20 отключается потенциометр 18 и подключается к нему потенциометр 25 (фиг.1), тем самым изменяется задание ПИ-регулятору 20, вместо пускового момента поддерживается неизменным момент, необходимый для режима намотки. На вход ПИ-регулятора 20 через резистор 21 теперь подается напряжение задания с потенциометра 25 (фиг.1). Положение движка потенциометра 25 и определяет необходимую величину момента в режиме намотки проволоки на пщулю (фиг.1 и 2). В этом случае асинхронному двигателю 2 задаются механические характеристики: начальная 39 и соответствующая концу режима намотки 40 (фиг.2) В процессе режима намотки с увеличением диаметра паковки при неизменном моменте уменьшается скорость вращения двигателя и шпули за счет увеличения сопротивления в цепи ротора уменьшением скважности работы тиристора 35. Диапазон изменения скорости определяется наибольшим диаметром паковки, который обычно увеличивается в два раза, поэтому скорость вращения двигателя 2 и шпули уменьшается- при полной намотке шпули также в два раза.
1 При снижении скорости значение напряжения на выходе трехфазного выпрямителя 3 увеличивается и становится больше напряжения задания источника 43 датчика напряжения (фиг.З). На выходе датчика 15 напряжения появляется нулевой сигнал (фигоЗ и 4). Однако это не изменяет состояния выходов блока 13 управления до окончания режима намотки вследствие запоминания предьщущего состояния на двух элементах 54 и 55 (фиг.4).
По окончании намотки и выключении коммутирующего аппарата 1 двигатель останавливается на обоих входах блока 13 управления (фиг.1 и 4) появляются единичные сигналы. На первый вход единичный сигнал поступает через замкнувшийся размыкагаций контакт 11, и тем самым производится деблокировк (снятие) памяти. На второй вход единичный сигнал поступает с выхода датчика 15 напряжения (фиг.3). При этом на первом выходе блока 13 управления появляется единичный сигнал на включение клю чей 16 и 17 (фиг.1 и 4). На втором выходе также появляется единичный сигнал, который обеспечивает замыкание ключа 22 и соответственно цепи обратной связи ПИ-регулятора 20. Напряжение управления на выходе ПИ-регулятора 20 равно нулю, скважность работы тиристора 35 минимальна, а сопротивление резистора 5 в цепи ротора максимальна. На третьем выходе блока 13 управления появляется нулевой сигнал, которьй обеспечивает раз мыкание ключей 23 и 24, блок 13 управления находится в исходном состоя нии перед очередным включением. Управляемьш тиристорный коммутато 7 (фиг.1 и 9) работает следующим образом. При подаче управлякмцего импульса с выхода усилителя 106 мощности (фиг.8) на тиристор 36 коммутирующий конденсатор 112 заряжается по контуру: выпрямитель 3 - дроссель 4 конденсатор 112 - тиристор 36 дроссель 113 - выпрямитель 3. Выпрям ленный ток ротора замыкается через резистор 5. Затем подается импульс управления с выхода усилителя 104 мощности (фиг.8) на тиристор 35 (фиг.9). Тиристор 35 открывается и закорачиваетрезистор 5 (фиг.1). Ток ротора начинает нарастать, по зкспоненциальному закону вследствие наличия в цепи индуктивностисглаживающего дросселя 4. Одновременно происходит колебательный перезаряд коммутирующего конденсатора 112 по контуру: тиристор 35 - дроссель 113 - диод 114. При последующей подаче управляющего импульса на тиристор 36 и его открывании напряжение коммутирующего конденсатора 112 прикладывается в обратном направлении к тиристору 35, обеспечивая тем самым его закрывание. В цепь выпрямленного тока ротора вводится резистор 5, и ток ротора уменьшается. Ко1-1мутирующий конденсатор 112 снова перезаря)(сается, и далее процессы повторяются в каждом из последующих режимов. Возможность управлять процессом пуска и намотки за счет поддержания постоянства необходимых и выбираемых заранее для каждого сорта проволоки пускового момента, момента режима намотки и уменьшающегося с ростом диаметра паковки натяжения значительно уменьшает осевые усилия от запасаемой в паковке энергии упругого растяжения проволоки. Этим устраняется причина возникновения динамических перегрузок, приводящих к деформации бортов пуль и опорных подшипников, за счет его повьшается качество технологиеского процесса намотки проволоки.
u



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1983 |
|
SU1171943A1 |
| Устройство для регулирования натяжения при намотке длинномерного материала | 1988 |
|
SU1627488A1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| Асинхронный вентильный каскад | 1985 |
|
SU1356173A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| Электропривод переменного тока | 1989 |
|
SU1753574A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1985 |
|
SU1376208A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ АППАРАТУРЫ РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ | 1986 |
|
RU1478884C |
| Устройство для компенсации реактивной мощности многомостового вентильного преобразователя | 1982 |
|
SU1069065A1 |




ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА, содержащий асинхронный двигатель с фазньи ротором, в роторную цепь которого включен выпрямитель, с выходом которого через сглаживающий дроссель связан резистор, параллельно которому силовым входом подключен управляемый тиристорный коммутатор, выход которого связан с источником постоянного напряжения, управляющий вход управляемого тиристорного коммутатора подключен к выходу формирователя импульсов управления тиристорами, отличающийся Тем, что, с целью снижения динамических нагрузок, в него введены датчик тока, входом связанный с выходом выпрямителя, датчик напряжения, связанньй с выходом выпрямителя, блок управления с двумя входами и тремя выходами, пять ключей с управляющими входами, два потенциометра, соединенные неподвижными вьшодами взаимнопараллельно и подключенные между выводом источника постоянного напряжения и общей точкой нулевого потенциала, пропорционально-интегральный ре- гул1ятор с тремя входами, генератор пилообразного напряжения, компаратор с двумя входами, выходом связанный с входом формирователя импульсов управления тиристорами, электромагнитное реле с замыкакяцим и размыкающим кон. тактами, подвижные выводы которых соединены между собой и с первым входом блока управления, неподвижный вьшод размьжающего контакта через резистор соединен с соответствующим вьшодом источника постоянного напряжения, неподвижный вывод замыкающего контакта соединен с общей точкой нулевого потенциала, катушка этого реле подключена между диумя фазными выводами обмотки статора асинхронного двигателя, выход датчика напряжения соединен с вторым входом блока управления, первый выход которого соединен с управляющими входами первого и второго ключей соответственно, второй выход блока управления соединен с управляющим входом третьего ключа, подключенного параллельно цепи обратоь ной связи пропорционально-интеграль 4 00 ного регулятора, выход которого соединен с одним из входов компаратора, сл с другим входом которого соединен со выход генератора пилообразного напряжения, третий выход блока управления соединен с управляющими входами четвертого и пятого ключей соответственно, выход датчика тока соединен с одним из входов пропорционально-интегрального регулятора, другие два входа которого через первый и четвертый ключи связаны с выводами движков двух потенциометров соответственно, а через второй и пятый ключи соединены с общей точкой нулевого потенциала.
QJus.f
на(
%w
t ОтЗ
3S
фиг. г
0ml
t/«.5
K27
12
От 20 ОшЗЗ
16
К3
7 75
фиг.6
фиг. 7
фиг. 9
| Способ регулирования скорости асинхронного двигателя | 1976 |
|
SU752724A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU780141A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
