Изобретение относится к электротехнике и может быть использовано в любых отраслях промышленности, где применяются позиционные или следящие электроприводы с точной остановкой механизма в заданной точке, в частности в системах позиционного управления механизмами прокатных станов. Известно устройство для. управления позиционным электроприводом с регулятором положения, имеющим параболическую характеристику и регулято ром частоты вращения, которое применяется для точной остановки электропривода Cl . Недостатком этого устройства явля ется наличие статической ошибки Л 5 по положению, величина .которой определяется параметрами системы управления .электроприводом и зависит от статического момента механизма. Статическая ошибка во многих случаях превышает заданную точность отработки перемещений. Кроме того, для многих механизмов, в частности для механизмов прокатных станов, статический моме.нт в основном определяется моментом сил трения -и резко (в 2,5 раза) возрастает при уменьшении скорости перемещения механизма. Поэтому при.работе вблизи точки оста.нова статическая ошибка увеличивается. Наиболее близким к изобретению являетс-я устройство для управления позиционным электроприводом, содержащее последовательно включенные бло сравнения с подключенными к его входам задатчиком и датчиком, положения .цифро-аналоговый преобразователь, операционный усилитель и регулятор частоты вращения с подключенным к его входу датчиком частоты вращения .а также блок задания частоты вращени и два релейных элемента, управляквдий вход одного из которых через дешифра тор и усилитель подключен к выходу цифро-аналогового преобразоватвля, при этом замыкающий контакт первого релейного элемента включен между выходом операционного усилителя и регулятором, частоты вращения, а Размыкающий контакт одним своим выводом соединен с входом регулятора частоты вращения 23. Устройство также не обеспечивает требуемой точности остановки рабочего механизма в заданной точке при изменениях статического момента механизма, поскольку вблизи точки остановки рабочего механизма после отклонения релейного элемента и .пере вода операционного усилителя в режим интегрирования происходит периодическое размыкание контура регулирования положения с частотой поступления импульсов от датчика положения вследствие шунтирования выхода опера ционного усилителя ключом. При вариациях статического момента леханизма, в частности при его увеличении,, и соответствующем изменении интенсивности торможения возможна остановка механизма на интервале, разомкнутого состояния контура. Зто состояние соответствует статическому равновесию системы, в котором она может д;олго находиться. Недостатки проявляются в работе системы и при отработке задаваемых перемещений гф1нимальной величины (единицы импульсов)при начале движения из состояния покоя/, т.е. сис.тема застревает на интервале разомкнутого состояния контура положения, не обеспечивая отработки рассогласования по положению до нуля, и, соответственно, требуемой точности остановки. Цель изобретения - повышение точности остановки электропривода. Цель достигается тем, что в устройстве для управления позиционным электроприводом, содержащем последовательно включенные блок сравнения с подключенными к его входам задатчиком и-датчиком положения, цифро-аналоговый преобразователь, операционный усилитель и регулятор частоты рращения с подключенным к его входу датчиком частоты вращения, а также блок задания частоты вращения и два релейных элемента, управляющий вход одного из которых через дешифратор и усилитель подключен к выходу цифро-аналогового преобразователя, при этом замыкающий контакт первого релейного элемента включен между выходом операционного усилителя и . регулятором частоты вращения, а размыкающий контакт одним своим выводом соединен с входом регулятора частоты вращения, второй релейный элемент снабжен размыкающим контак,том, ,а его управляющая цепь соединена с выходом датчика частоты вращения, а размыкающий контакт второго релейного элемента включен Между блоком задания частоты вращения и вторым выводом разглыкающего контакта первого релейного элём,ента, причем операционный усилитель выполнен с параболической характеристикой. . На чертеже изображена структурная схема устройства. Устройство содержит последовательно :включенные блок 1 сравнения с подключенныг эд к его входам задатчиком 2 и датчиком 3 п.оложения, цифро-аналоговый преобразователь 4, операционный усилитель 5 и регулятор б частоты вращения с подключенными к его входу датчиком 7 частоты вращения (узел 8 сравнения регулятора скорости показан вне регулятора), а также блок 9 задания частоты вращения и : релейные элементы 10 и 11. Управляю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Устройство для управления позиционным электроприводом | 1978 |
|
SU764077A1 |
| Устройство для управления позиционным электроприводом | 1985 |
|
SU1270857A1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Автоматизированный электропривод электромеханического центробежного вибромодуля | 1983 |
|
SU1124233A1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Электропривод нажимного устройства прокатного стана | 1977 |
|
SU671891A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Позиционный электропривод | 1984 |
|
SU1228210A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЗИЦИОННЫМ ЭЛЕКТРОПРИВОДОМ, содержгицее последовательно включенные блок сравнения с подключенными к его .входам эадатчиком и датчиком положения, цифро-аналоговый преобраэователь, опера:ционный усилитель и регулятор частоты вращения с подключенным к его входу датчиком частоты вращения, а также блок задания частоты врс1щения и два релейных элемента, управляющий вход одного из которых через дешифратор и усилитель подключен к выходу цифро-аналогового преобразователя, при этом замыкающий контакт первого релейного элемента включен между выходом операционного усилителя и регулятором, частоты вращения, а размыкающий контакт одним своим выводом соединен с входом регулятора частоты вращения, о тличающеес я тем, что, с целью повышения точности остановки электропривода, второй релейный элемент снабжен размыкающим контактом, а его управляющая цепь соединена с выходом датчика частоты вращения, а размы- . § канхций контакт второго релейного элемента включен между блоком заданйяГЛ частоты вращения и вторым выводом .j размыкающего контакта первого релей- JCI ного элемента, причем операционный I .усилитель выполнен с параболической 2 характеристикой.: СП со ьо NI со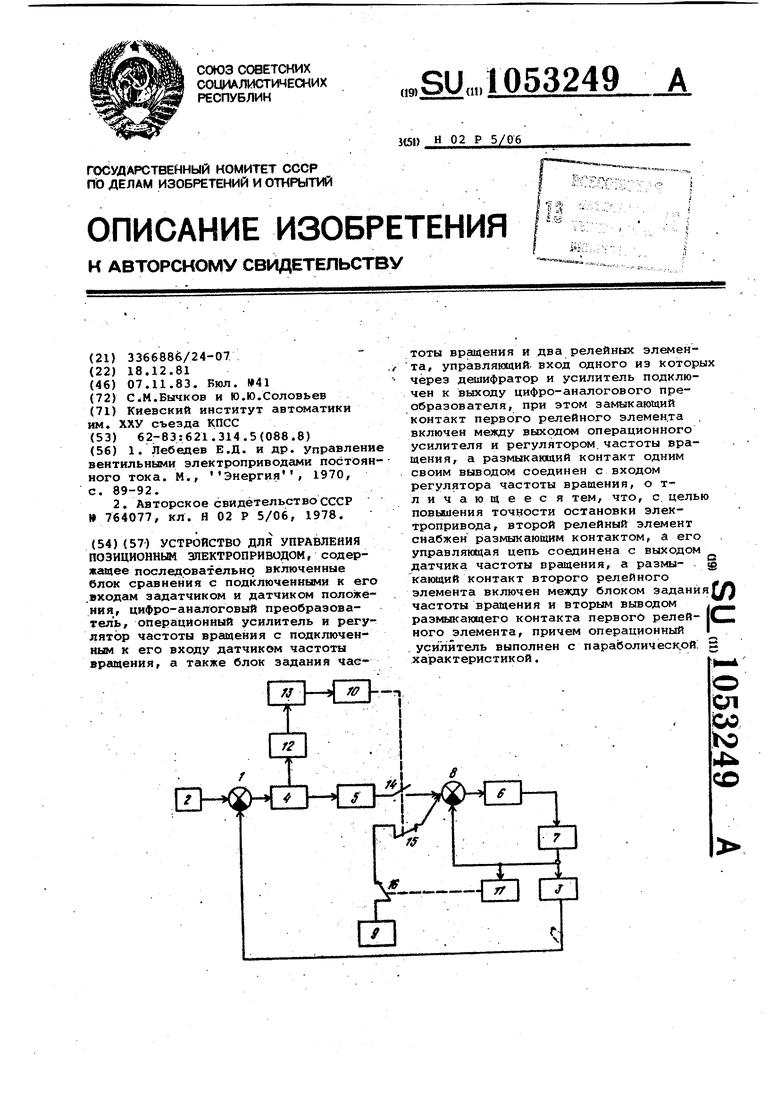
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лебедев Б.Д | |||
| и др | |||
| управление вентильными электроприводами постояв-ного тока | |||
| М., Энергия, 1970, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления позиционным электроприводом | 1978 |
|
SU764077A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
