1
Изобретение относится к судостроению, в частности к плавучим грузоподъемным станциям.
Известна плавучая грузоподъемная станция, включакчцая в себя горизонтальные емкости, балластные емкости и грузоподъемное оборудование l .
Однако такая станция имеет огра- Q ничейные области применения и диапазон глубин использования.
Цель изобретения - расширение области применения и увеличение диапазона глубин использования плавучей 5 грузоподъемной станции.
Для этого плавучая грузоподъемная станция снабжена цилиндрическими сборочно-подъемной камерой с горизонтальными полуосями и двумя транспорт- 20 ными камерами со стыковочным и захватным устройствами, при этом сборочноподъемная камера установлена между горизонтальными емкостями станции и связана с ними посредством горизон- 25 тальных полуосей с возможностью поворота в вертикальной-плоскости,а транспортные камеры связаны со сборочноподъемной камерой посредством стыковочного и захватного устройства. 30
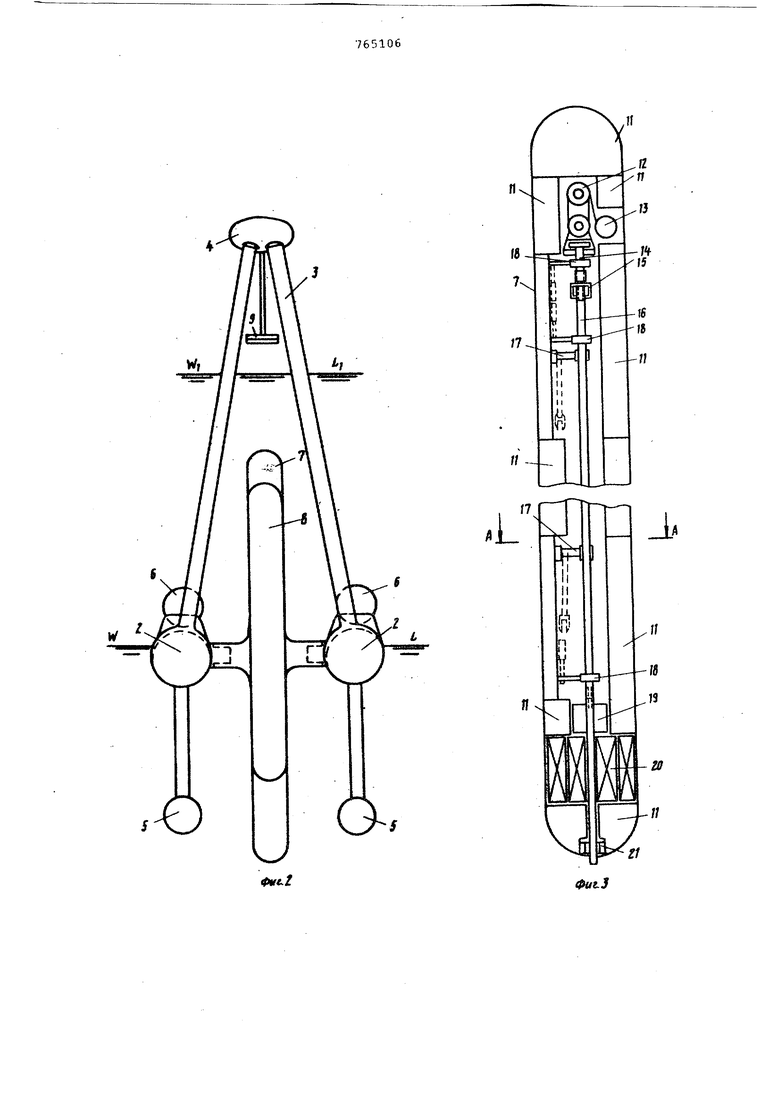
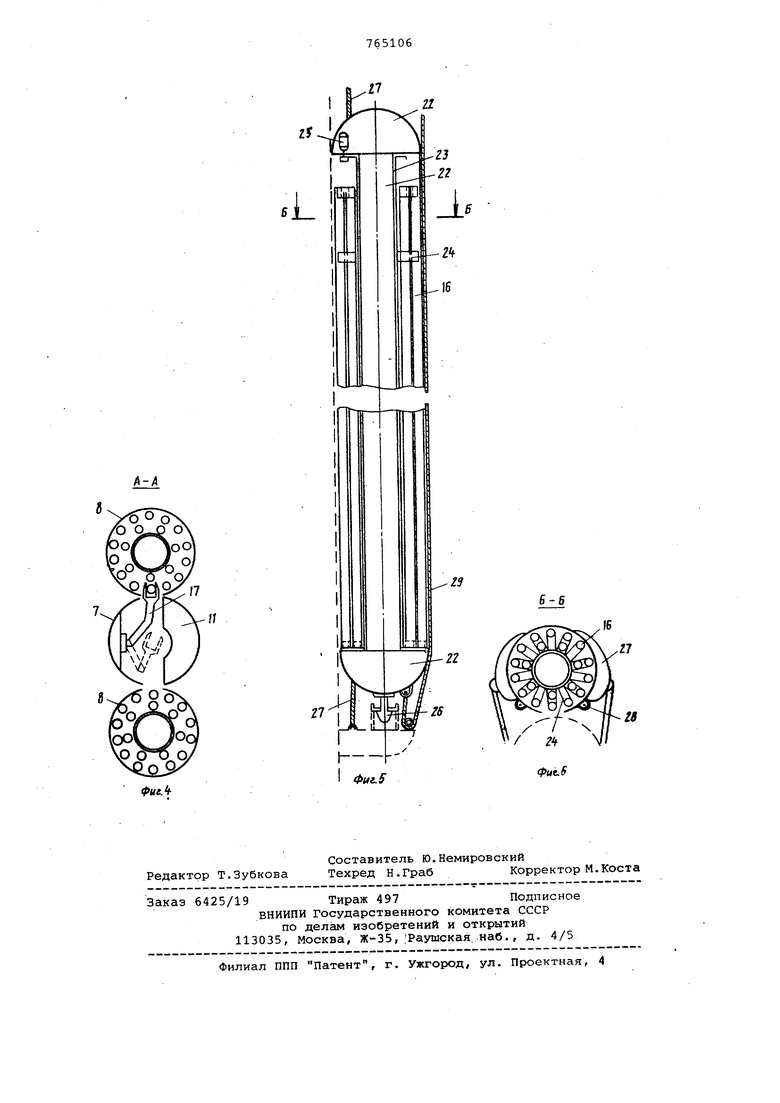
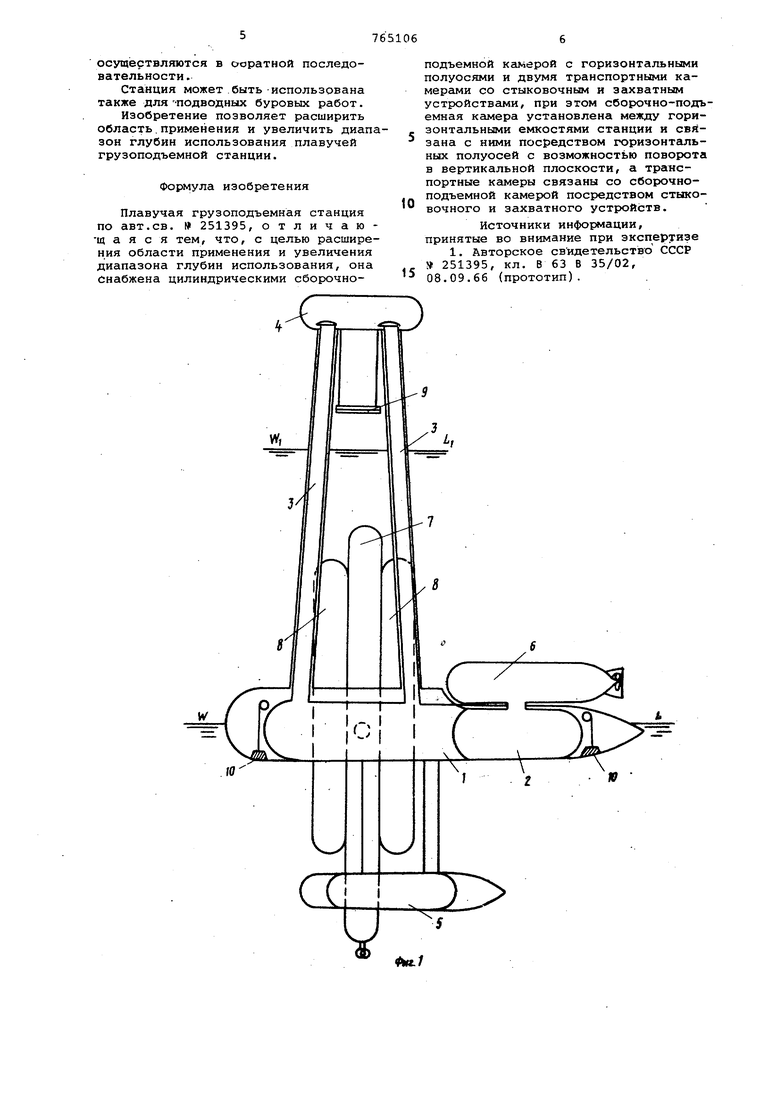
На фиг. 1 схематически изображено предлагаемое устройство, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - сборочно-подъемная камера, разрез; на фиг. 4 - сечеИие А-А на фиг . 3; на фиг. 5 - транспортная камера, разрез; на фиг. 6 - сечение Б-Б на фиг. 5,
Плавучая грузоподъемная станция включает в себя две горизонтальные параллельные друг другу емкости 1, в которых заключен основной плавучий объем станции. В них могут быть размещены, жилые отсеки., а также декомпрессионные камеры 2 для водолазов. OJc:тaльнoй плавучий объем заключен к четырех вертикальных или наклонных колоннах 3. На колоннах 3 сверху устанавливается.грузовая пло(цадка с лебедкой. В данном варианте она заменена верхней камерой 4.
Отстойчивость станции обеспечивается бёшластной емкостью 5, имеющей уравнительную цистерну. Балластная емкость подвешена на выдвижных вертикальных стойках и может быть поднята под горизонтальные емкости после продувания уравнительной цистерны для уменьшения осадки станции
при вводе ее в базу. Для доставки водолазов к месту работ предусмотрены самоходные транспортные аппараты 6.
Между горизонтальными емкостями 1 станции размещен необитаемый сборочно-подъемный комплекс, состоящий из сборочно-подъемной камеры 7 и двух транспортных камер 8. Кроме того, на станции предусмотрены площадка для подъема личного состава с поверхности (например, сплав средства) в верхнюю камеру 9 и подводные якори 10.
Основным соединительным звеном между поднимаемым объектом и грузоподъемным средством являются стальны пустотелые, заглушенные по концам трубы (штанги), вес которых частично компенсируется их плавучестью. Штанги собираются в подъемную линию в сборочно-подъемном комплексе. Он состоит из сборочно-подъемной камеры и двух транспортных камер.
Сборочно-подъемная камера 7 представляет собой вертикальный цилиндр со сферическими, донышками. Часть объема камеры занимают уравнительные цистерны 11, с помощью которых компенсируется вес самой кеилеры и находящегося на ней оборудовЁгния. При этом должен быть скомпенсирован вес верхней (выше оси) и нижней (ниже оси) частей камеры так, чтобы при ее повороте относительно оси дифферентовка платформы не изменялась.
В верхней части камеры расположен механизм спуска и подъема, состоящий из талей 12 и лебедки 13, либо из гидроприводов.
Тали удерживают верхнюю головку 14, лежащую своими заплечиками на подшипниках и имеющую возможность свободно вращаться.
Внутри камеры расположены манипуляторные устройства,обеспечивающие сборку и разборку подъемной линии штанг. К ним относятся:две П-образны балочки 15 с подвижными каретками, снабженными захватами. Эти балочки воспринимают вес перемещаемой штанги 16 (из транспортной камеры на подъемную линию при ее сборке или обратно при разборка); два манипулятора 17 поперечного смещения штанги; три манипулятора 18 центровки и вращения штанги и верхней головки.
В нижней части камеры расположены зажим-стопор 19 для удержания подъемной линии при присоединении или отсоединении штанг, привод вращения подъемной линии 20, а также нижний подшипник 21.
Сборочно-подъемная камера имеет поворотное устройство, опирающееся на полуоси, прикрепленные с внутренней стороны к корпусу горизонтальных емкостей платформы. Электропитание
на нее подается со станции по кабелю Управление работой всех механизмов производится автоматической системой по программе.
Транспортная камера 8 представляет собой также вертикальный цилиндр со сферическими донышками. Внутри ее корпуса выделены уравнительные цистерны 22, которые придают снаряженной камере положительную плавучесть.
Внутри камеры размещена поворотная кассета 23 со штангами 16. В кассете положение штанг фиксируется зажимами 24. Для вращения кассеты со штангами каждая камера имеет привод 25. Транспортная камера соединяется со сборочно-подъемной камерой с помощью стыковочного узла 26 в нижней части и захватов 27 в верхней части. Эти устройства обеспечивают достаточно простую замену транспортных камер в подводном положении.
Для установки камеры на свое место на ее корпусе имеются специальные обушки, через которые пропускаются направляющие тросы 28. Кроме того, имеется тросподтягивания 29, пропущенный через бдок на выступе сборочноподъемной камеры и закрепленный за рым на нижней части транспортной камеры с помощью карабина.
Для перемещения штанг из транспортной камеры в сборочно-подъемную и обратно имеются прямоугольные вертикальные вырезы в корпусе транспортной камеры и в корпусе сборочно-подъемной камеры. Оба выреза в присоединенном положении камер совмещены.
Электропитание на транспортную камеру подается со станции по кабелю, либо через специальные.клеммы на .корпусе сборочно-подъемной камеры.
Плавучая грузоподъемная база работает следующим образом. К месту работ станцию буксируют в полупогруженном состоянии, при этом сборочно-подъемному комплексу путем соответствующей балластировки придает горизонтальное положение. На месте работ последний переводят в вертикальное положение, а станция устанавливается на якоря 10. Спускаемое на грунт оборудование или захват для подъема объекта присоединяются к стыковочному узлу, имеющемусянанижнем конце первой штанги 16.
Сборка штанг 16 в подъемную линию осуществляется в сборочно-подъемной камере 7, куда они подаются манипуляторг ми из транспортных камер 8. Спуск подъемной линии с грузом, закрепленным на нижнем конце первой штанги, на грунт осуществляется при помощи механизма спуска-подъема, установленного в камере 7.
Подъем объектов со дна моря, демонтаж подъемной линии и складирование штанг 16 в транспортных камёргис
осуществляются в ооратной последовательности.
Станция может.быть-использована также для -подводных буровых работ.
Изобретение позволяет расширить область.применения и увеличить диапазон глубин использования плавучей грузоподъемной станции.
Формула изобретения
Плавучая грузоподъемная станция по авт.св. № 251395, отличающ а я с я тем, что, с целью расширения области применения и увеличения диапазона глубин использования, она снабжена цилиндрическими сборочноподъемной кг1мерой с горизонтальными полуосями и двумя транспортными камерами со стыковочным и захватным устройствами, при этом сборочно-подъемная камера установлена между горизонтальными емкостями станции и связана с ними посредством горизонтальных полуосей с возможностью поворота в вертикальной плоскости, а транспортные камеры связаны со сборочноподъемной камерой посредством стыковочного и захватного устройств.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 251395, кл. В 63 В 35/02, 08.09.66 (прототип).
:L
| название | год | авторы | номер документа |
|---|---|---|---|
| Подводный буровой станок | 1980 |
|
SU981558A1 |
| СУДНО И ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2001 |
|
RU2217342C2 |
| ПЛАВУЧЕЕ СРЕДСТВО ДЛЯ ВЫПОЛНЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ | 2011 |
|
RU2459739C1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2011 |
|
RU2518683C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ НЕГАБАРИТНЫХ ПОДВОДНЫХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500569C2 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| Судно для подъема затонувших объектов | 1981 |
|
SU1063705A1 |