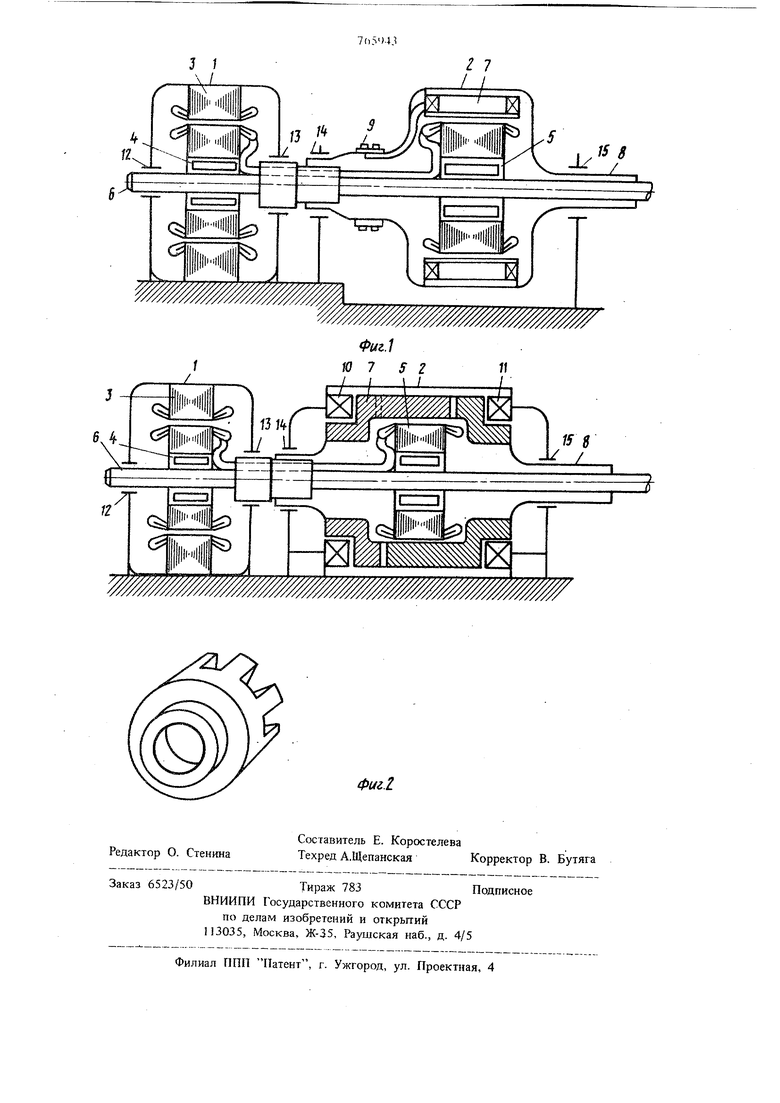
Электропривод стстоит из двух члектрических MaiJinH переменного тока: синхронной машины 1 и синхронной машингл 2. Статор 3 вь полнен с обычной многофазной обмоткой, при работе привода подключаемой к питающей сети перемешюго тока. Роторные пакетъ 4 и .5 установлены на внутрегшем валу 6 и снабжены многофазными обмотками обычного типа, которые непосредственно (без помощи скользящего контакта соединены между собой с изменением порядка следования фаз. Роторный |пакет 5 обхвачен внeuл им ротором 7 с полым валом 8. В электроприводе на фиг. 1 внешний ротор 7 выполнен в виде полого цилиндра, на внутренней полости которого смонтированы явновыраженные полюса, возбуждаемые катушками постоянного тока через скользящий контакт
Электропривод, конструктивная схема которого изображена на фиг. 2, является полностью бесконтактным. Внешний ротор 7 в нем выполнен в виде системь когтеобразных полюсов, возбуждаемых через воздушный зазор аксиальными катушками 10 и И постоянного тока. В аксонометрии .показана конструкция половины внешнего ротора 7 с когтеобразными по.гдасами. В конструкцли обоих электроприводов внутренний вал 6 установлен в подшипниках 12, 13 и в третьем, не показанном на чертежах и расположенном за концом полого вала 8. Внешний ротор синхронных частей электроприводов установлен в подшипниках 14 и 5.
Включаемая на питающую; сеть переменного тока асинхронная маш1ша под действием нагрузки виртреннего вала 6 и включенного в его роторную цепь комплексного электрического сопротивления, которое представляет собой нагружьнная синхронная машина 2, вращается с больimiM скольжением. В отличие от режимов, больших скольжений обычных асинхроннйк маиюн ток правильно спроектирова1шой асинхронной машины в этих режимах не превьзшает его номинальной величины.
Из-за изменения порядка следования фаз при электрическом соединении обмоток роторного пакета 4 асинхронной и роторного пакета 5 синхронной машин скорость враще}шя электромагнитного поля относительна роторного пакета 5 вышттается из скорости вращения внутреннего вала б и роторных пакетов 4 и 5. Обычным режимом работы электропривода является превышение скорости вращения электромдпштной волны отноотгельно роторного пакета 5 над механической скоростью внутреннего вала 6 При таком соотношении скоростей резу.г1ыирующее вращение электромагнитного поля в пространстве и возбужденных постоянным током внешних роторов 7 с их полыми валами 8 на фиг. 1 и 2 Является встречным по отношению к вращению внутреннего вала 6. Это обеспечивается при проектировании электропривода за счет выбора соотношения параметров обеих машин и нагрузок коаксиа;гьных валов 8 и 6. В случае работы электропривода на систему соocHbix гребных винтов встречного вращения соотношение нагрузок валов определяется геометрией гребных винтов.
Рассмотрим один из вариантов проектирования предлагаемого электропривода на числовом примере. Пусть требуется обеспечить привод двух соосных винтов, вращающихся встречно со скоростью 250 об/мин. Такая задача может быть решена описанным электроприводом, состоящим из машин с С11нхро1шой скоростью 750 об/мин, каждая, т.е. восьмиполюсных при питании напряжением частотой 50 Гц.
Номинальный режим агрегата соответствует скольжению асинхронной машины 1 равному 2/3 В этом случае внутренний вал 6 вращается со скоростью 1/3 синхронной, т.е. 250 об/мин., электроматитное поле относительно роторного пакета 5 вращается в противоположную сторон со скоростью 500 об/мин, а результирующая его скорость в пространстве и скорость внещнего ротора 7 и полого вала 8 равна также 250 об/мин (500-250), но в направлении, противоположном тому, в каком вращается внут рениий вал 6 со своими роторными пакетами.
Необходимо иметь в виду, что вращающий момент механической реакции внешнего ротора 7 на роторный пакет 5 является полезным, складывается с моментом, развиваемым асннхрошюй машиной 1, и работает на нагрузку внутреннего вала 6. В слзчае привода соосных гребных винтов это обстоятельство приводит к необходимости применения в системе винтов с неодинаковым шагом, производительностью и уснлк;1ми упора. Стремление к уменьшению различий этих показателей винтов в системе прводит к необходимости использования в электроприводе малополюсной асинхронной части и многополюсной синхронной. Если в рассмотренном числовом примере трекратное снижение полюсности машин-в электроприводе обеспечивает уменьшение поперечных его измерений более чем в два раза, то в последнем случае достигается многократное снижение полюсности асинхронной части электропривода и лишь двойное - синхронной части. Это значит, что имеется возможность создать электропривод грибообразной формы с предеФно уменьшенным диаметром асинхронной част и с диаметром синхронной части, на 40-45% меньшим, чем в слуше использования неагрегатированных двигателей традиционной конструкции на те же мощности и номиналы скоростей вращения. Электроприводы грибообразной формы применително к оборудованию систем соосных гребных винтов компактно вписываются в кормовые оконечности судоных корпусов. Предложенньш электропривод может применяться в оборудовании как известных соосных механизмов встречного вращения в различных областях техники, например в самолетостроении в аэродинамических исследованиях, так и механизмов, которь е могут быть создань в будущем. Эффект уменьшения полюсности махшш в предложенном их агрегатировании применительно к. приводу воздушных винтов, являюищхся высокооборотными, делает целесообразным выполнение злектромеханических передач повышенной частоты в подвижных объектах, например в транспортных средствах на воздушной подушке. Электромеханические передачи повышенной частоты обладают уменьшенным весом, менее металлоемки. Однако основным назначением предлагаемого устройства является оборудованне им системы соосных гребнь х винтов встречного враш;ения. Применение изобретения в судостроении может обеспечить высокую компактность гребной установки, снижение веса и стоимости-средств злектродвижения судов. Кроме того, предлагаемое устройство в результате соответствующих конструкторских проработок может оказаться наиболее целесообразным из всех известных средств привода системы соосных гребных винтов встречного вращения. Компактность предлагаемого электропривода позволяет минимизировать длину обоих коаксиальных валов в системе соосных гребных винтов встречного вращения. Это создает предпосылки для полного устранения прогиба внутреннего вала и коренного повышения надежное ти его работы. Внедрение систем соосных гребньЕХ встречного вращения в сочетании с предлагаемым электроприводом позволяет решить в судостроении ряд задач конструкторского плана Сюда относятся возможность отказа при проекТ1фовани11 и строительстве судов от применения зубчатых редукторов или изготавливаемых в основном зарубежными фирмами громоздких малооборотных дизелей; сокращение протяженности валопроводов и, как следствие, многократное уменьшение количества их опор, сальниковых устройств, фланцевых и муфтовых соединений; достижение более ращюналького использования трюмных помещений судовых корпусов; обеспечение решения специальных задач при строительстве судов. Благодаря внедрению в судостроении систем соосных гребных винтов использование изобретения обеспечивает повышение экономичности гребных установок, приводит к существенной экономии топлива при эксплуатации судов. Формула изобретения Электропривод соосных механизмов встречного вращения преимущественно малооборотных соосных гребных винтов, содержащий асинхрон1 ую и синхронную ма1Ш{ны, фазная обмотка первой из которых и якорная обмотка второй злектрически соединены между собой и расположены на общем валу, относительно котсфого с возможностью вращения установлен индуктор Сйнхр«1ной машины, а первичная обмотка статора асинхронной маишны подключена к источнику питания, отличающийс я тем, что, с нелью уменьшения массы и поперечных размеров электропривода, указанные фазная и якорная обмотки соединены с изменением порядка следования фаз. Источники информащт, принятые во внимание при экспертизе 1.Рихтер Р. Электрические машины.М.-Л., ГЭИ, 1939, т. IV, с. 60. 2.Авторское свидетельство СССР N 34074, кл. Н 02 Р 7/78, 1932 (прототип).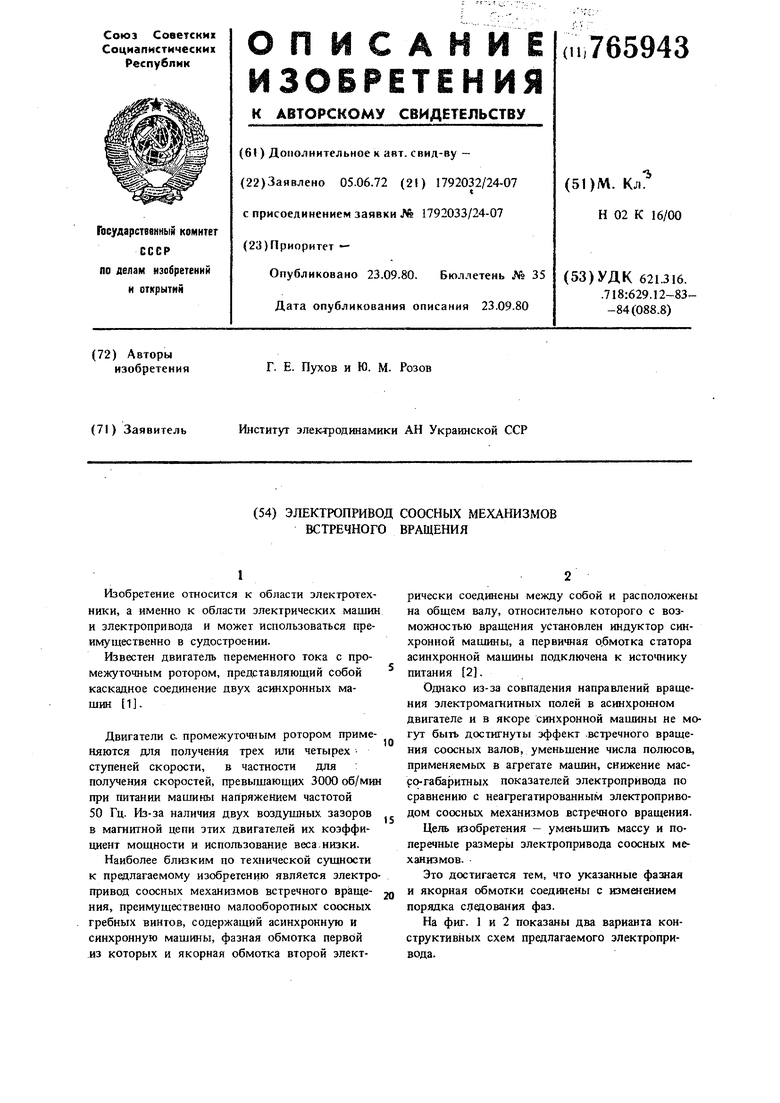

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕМЕННОМ ТОКЕ | 2012 |
|
RU2509002C2 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437201C1 |
| Гребная электрическая установка | 1983 |
|
SU1105391A1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ БЕСКОНТАКТНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437202C1 |
| Сверхпроводниковая индукторная электрическая машина с комбинированным возбуждением | 2018 |
|
RU2696090C2 |
| Двухпакетная индукторная электрическая машина с комбинированным возбуждением (варианты) | 2018 |
|
RU2696273C1 |
| ДВУХДВИГАТЕЛЬНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1969 |
|
SU235184A1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
| Электропривод соосных механизмов встречного вращения | 1989 |
|
SU1677799A1 |
| ЭЛЕКТРОПРИВОД | 1970 |
|
SU262258A1 |