,.,....1 Изобретение относится к исполнительным устройствам систем автомати ческого регулирования и может быть использовано в химической, нефтехимической и нефтеперерабатывающей про-5 мышленности для контроля нормального, функционирования пневматических поршневых и мембранных исполнительных механизмов, управляющих работой регулирующих органов.10
Известный способ проверки нормальной работы аналогового исполнитель-. ного механизма заключается в подаче на его вход воздействия и в последующем наблюдении реакции по выходному 15 параметру Щ.
Из известных способов контроля . работы аналоговых пневматических исполнительных механизмов наиболее близок к описываемому способ контро- 20 ля путем подачи входного периодического сигнала 2 .
Недостатком этого способа является то, что он не обеспечивает оперативности контроля, .так как требует 25 непосредственн.ого визуального наблюдения за перемещением выходного элемента исполнительного г еханиэма, что часто оказывается затруднительным .или вйвсе невозможным, если ис полйи-
тельное устройство находится в трудно доступном или пасномдля здоровья месте. Передача же величины перемещения на расстояние - довольно сложная задача, особенно при малых перемещениях.
Цель изобретения - обеспечение оперативного дистанционного контроля работы аналогового пневматического исполнительного механизма.
Эта цель достигается тем, что из- . меряют колебания давления.во входной полости исполнительного механизма, формируют сигнал йо второй производной от изменённого давления и определяют состояние исполнительного механизма по количеству и форме импульсов полученного сигнала.
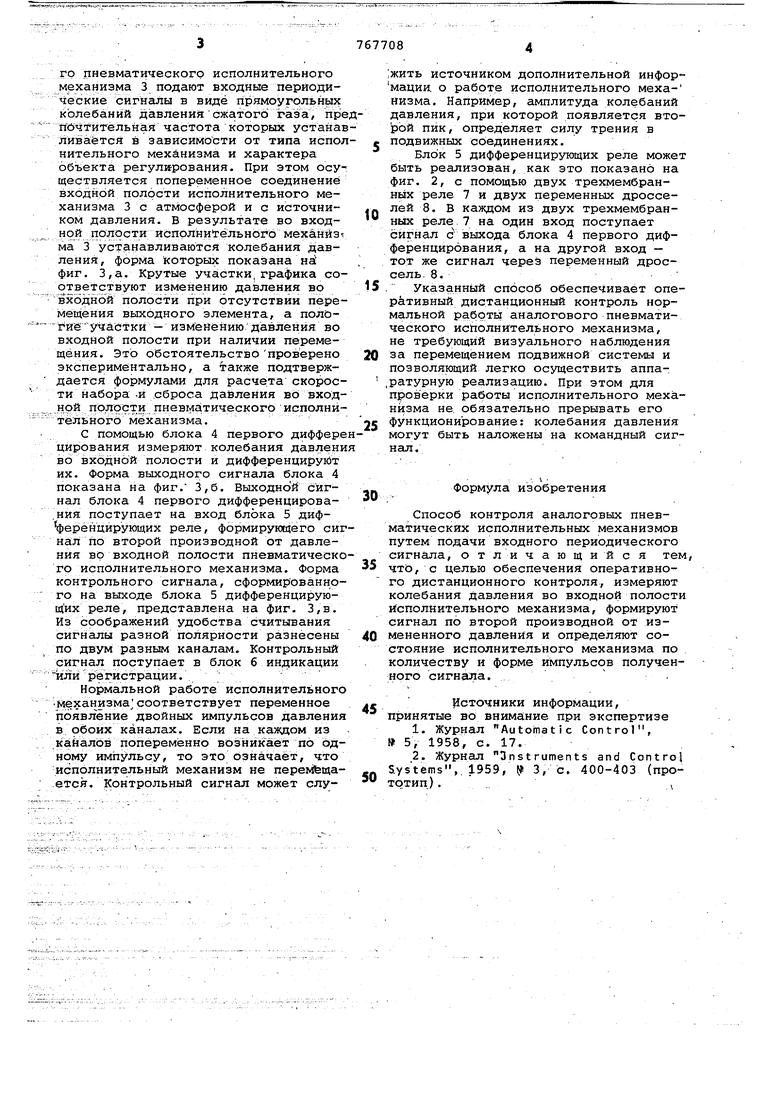
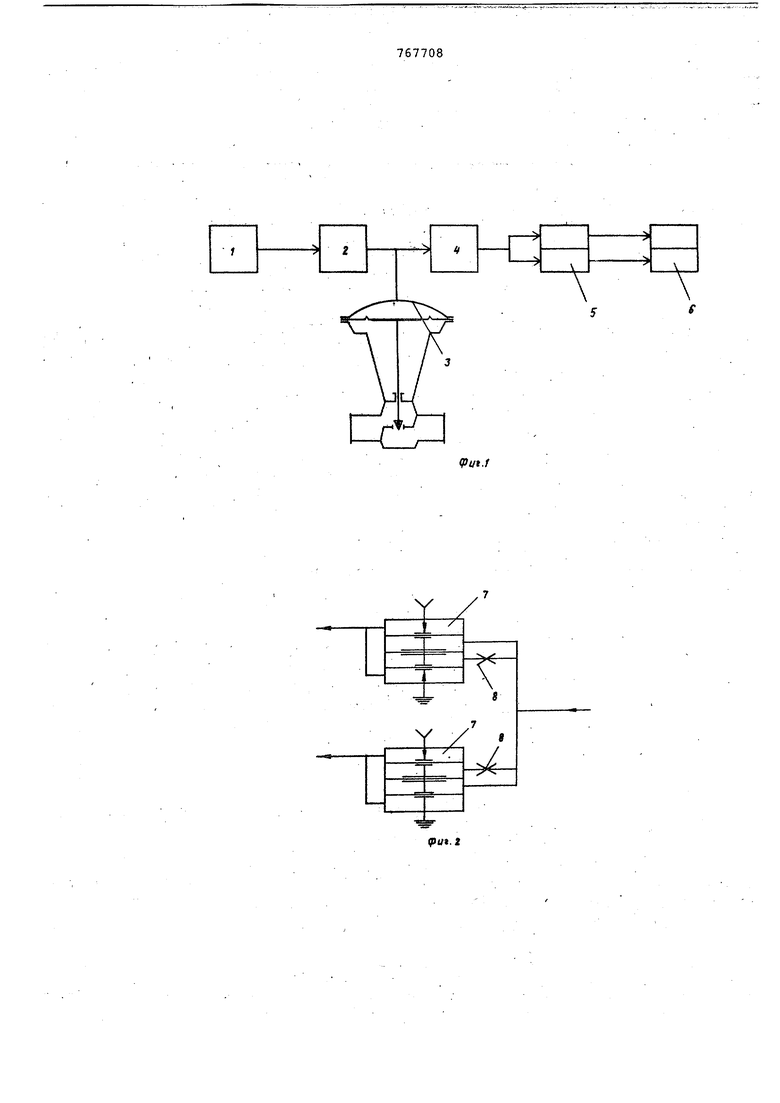
На фиг. 1 представлена блок-схема устройства, реализующего описываемый способ на фиг. 2 - принципиальная схема блока, реализующего операцию второго дифференцирования; на фиг.3,а, б,в - диаграммы, поясняющие описываемый способ.
Контроль за работой аналогового пневматического механизма осуществляется следующим образом.
С помощью генератора 1 колебаний через усилитель 2 на вход аналоговогр пневматического исполнительного механизма 3 подают входные периодические сигналы в виде прямоугольных колебаний давлениЯсжатого газа, пре пОЧтйтёльная частота которЕДХ устанав ливается в зависимости от типа испол нительного механизма и характера объекта регулирования. При этом осуществляется попеременное соединение входной полости исполнительного механизма 3 с атмосферой и с источником давления. В результате во входной полости исполнительного механизм ма 3 устанавливаются колебания давления, форма Которых показана на фиг. 3,а. Крутые участки,графика соответствуют изменению давления во входной полости при отсутствии перемещения выходного элемента, а полЬ гиёучастки - измёйёниюдавления во входной полости при наличии перемещения. Это обстоятельство проверено экспериментально, а также подтверждается формулами для расчета скорости набора -и .сброса давления во входной полости пневматического исполнйтёльногй механизма. С помощью блока 4 первого диффере цирования измеряют колебания давлени во входной полости и дифференцируют их. Форма выходного сигнала блока 4 показана на фиг. 3,6. ВыходноЙ Сигнал блока 4 первого дифференцирова.ния поступает на вход блока 5 дифференцирующих реле, формирующего сиг нал по второй производной от давления во входной полости пневматическо го исполнительного механизма. Форма контрольного сигнала, сформировэнного на выходе блока 5 дифференцирующих реле, представлена на фиг. 3,в. Из соображений удобства считывания сигналы разной полярности разнесены по двум разным каналам. Контрольный сигнал поступает в блок б индикации лирегистрации. Нормальной работе исполнительного Механизма соответствует переменное появление двойных импульсов давления в обоих каналах. Если на каждом из кайалов попеременно возникает по одному импульсу, то это означает, что исполнительный механизм не nepeNJenja.ется. Контрольный сигнал может слу|жить источником дополнительной информации. о работе исполнительного механизма. Например, амплитуда колебаний давления, при которой появляется второй пик, определяет силу трения в подвижных соединениях. Блок 5 дифференцирующих реле может быть реализован, как это показано на фиг. 2, с помощью двух трехмембранных реле 7 и двух переменных дросселей 8. В каждом из двух трехмембранных реле.7 на один вход поступает сигнал с выхода блока 4 первого дифференцирования, а на другой вход - тот же сигнал через переменный дроссель. 8, Указанный способ обеспечивает оперативный дистанционный контроль нормальной работь а.налогового пневматического исполнительного механизма, не требующий визуального наблюдения за перемещением подвижной системы и позволяющий легко осуществить аппаратурную реализацию. При этом для проверки работы исполнительного механизма не. обязательно прерывать его функционирование: колебания давления могут быть наложены на командный сигнал. Формула изобретения Способ контроля аналоговых пневматических исполнительных механизмов путем подачи входного периодического сигнала, о т л и ч а ю щ и и с я тем, что, с целью обеспечения оперативного дистанционного контроля, измеряют колебания давления во входной полости исполнительного механизма, формируют сигнал по второй производной от измененного давления и определяют состояние исполнительного механизма по количеству и форме импульсов полученного сигнала. . 5 сточники информации, принятые во внимание при экспертизе 1.Журнал Automatic Control, 5, 1958, с. 17. 2.Журнал 3nstruments and Control Systems,. 1959, 3, С. 400-403 (проТОТИЦ). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоразрядный накапливающий пневматически сумматор | 1987 |
|
SU1569812A1 |
| Пневматическое устройство для централизованного контроля | 1973 |
|
SU452823A1 |
| Способ дистанционного контроля пневматических исполнительных механизмов | 1984 |
|
SU1275378A1 |
| Устройство для дистанционного контроля состояния пневматических аналоговых исполнительных механизмов | 1987 |
|
SU1522158A1 |
| Пневматическая система дистанционного управления дизелем | 1989 |
|
SU1721279A1 |
| Пневматическое устройство для опреде-лЕНия зНАКА пРОизВОдНОй | 1979 |
|
SU851415A1 |
| Гидростатический уровнемер | 1984 |
|
SU1186953A2 |
| Пневматический селектор импульсов | 1974 |
|
SU525072A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР УРОВНЯ | 1972 |
|
SU358684A1 |
| Устройство для переключения пневматических систем регулирования | 1978 |
|
SU679930A1 |
тт-m
