Изобретение относится к устройствам диагностики состояния средств автоматики, в частности к устройства дистанционного контроля состояния ннёвматическ1 х аналоговых исполнителных механизмов систем унравления и может быть иснользовано в химической нефтехимической и смежных областях промьпштённости..
Цель изобретения расширение фун ид ональных возможностей устройства путем контроля нараметров ходовой характеристики исполнительного механизма.
На фиг, 1 приведеГ1а схема нредла- гаемого устройства; . на фиг„2 - иример экспериментальной характеристики Р f(o}, где Р давление на исполнительном механизме, S - переме- щение подвижного элемента неременной емкости.
Устройство содержит стабилизатор 1 давления воздуха, блок 2 постоянного массового расхода, блок 3 нере- ключения, тумблер 4, регулятор 5 скорости изменения давления, задат- чик 6, выходной канал 7 исполнитель- Hbiii механизм 8, управляемую перемек- нневмоемкость 9, датчик 10 пело-- жения подвшкного элемента переменной пневмоемкости, позиционер 11, двухко- ординатный регистратор 12, блок 3 дифференцирования о
Блок 2 постоянного массового рас хода содержит узел подачи воздуха и узел сброса воздуха, выходы кото--- рых соединены с соплами реле 14; . сообщенного своим выходом с выходным каналом 7 ,
Б качестве примера на фиг,1 показано выполнение узла яодачи воздуха в виде элемента 5 сравнения дросселя 16, на котором поддерживается постоянный перепад давления, опре- деляемьй сигналом от задатчика 1 7,, Вход узла соединен с выходом ; .табилизатора Аналогично, узел сброса воздуха содержит элемент 18 сравнения, дроссель 19, задатчик 20, Блок 3 переключения выполнен в виде элемента 21 сравнения и задатчика 22, Переменная пневмоемкость 9 выполнена с подпружиненным нодвилшым элементом 23, перемещение которого определяет ся сигналом от позиттионера. 1 ,
Вход 1 подключен к выходу тумблера 4, выход стабилиз.атора подсоединен к первому входу блока 2 поддержания постоянного массового расхода, выход которого подключен к выходному каналу 7 и к управляемой переменной плевмоемкости 9, Второй вход блока 2 подключен к выходу блока 3 переключения, информационный вход которого соединен с выходным каналом устройства, а питающий вход подключен к выходу тумблера 4. Информационный вход регулятора 5 через блок 13 подключен к выходному каналу устройства; другой информационный вход -- к выходу задатчика 6, переключающий вход - к выходу блока 3 переключения. Выход регулятора 5 через позиционер 1 1 соединен с управляющим входом пневмо- емкости 9. Первый вход двухкоординат- iioro регистратора 12 соединен с выходным каналом устройства, второй - с выходом датчика 10 положения под- вюкной системы пневмоемкости 9,
Принцип работы устройства заклю- . чается в том, что изменение объема входной камеры исполнительного механизма при наборе или сбросе давления с постоянным массовым расходом сжатого воздуха сопровождается изменением обьема переменной пневматической емкости, подсоединенной к входной камере исполнительного механизма и управляемой регулятором, поддерл иваюплим заданную постоянную скорость изменения давления. Поскольку для обеспечения постоянной скорости изменения давления в системе при постоянном массовом расходе сжатого воздуха суммарная емкость не должна изменяться, приращению объема входной камеры исполнительного механизма, соответствует равное, но с п ротивоположнь знаком приращение объема емкости; следовательно, перемещение подвижной системы исполнительного механизма сопровождается эквивалентным перемещением подвижной системы емкости. При этом устанавливается однозначная за- BHCiiMOCTb мелсду текущим значением давления Р в выходном канале устройства и величиной перемен ;ения подвижной системы емкости, идентифицируемая как ходовая характеристика исполнительного механизма.
Устройства работает следующим образом.
Выходной канал 7 устройства подсоединяют к импульсной линии исполнительного механизма 8. Вклгочение устройства в работу производится
515
тумблером 4, при этом подается питание на вход стабилизатора 1 и на второй вход блока 3 переключения. На выходе стабилизатора i устаиавливает- ся требуемое значение челргчины давле-- НИН, например 1,4 кгс/см,, а на выходе элемента 21 сравнения формируется сигнал О, гюступаю. ций в управляющую камеру реле 14 блока 2 и на третий вход регулятора 5, При поступлении этих сигналов во входную камеру исполнительного механизма 8 и в пневмоемкость 9 начинает поступать сжатьй воздух от стабилизатора 1 давЛенин через узел подачи воздухаj дроссель 165 проточные камеры элемента 15 сравнения и реле 14 с установленной величиной массового расхода, определяемой проводш остью дросселя 16. Регулятор 5 включается в режим прямого хода. При этом в выходном канале 7 устройства растет давление Р; поступающее через блок 13 дифференцирования на первый вход регулятора 5 и на первый вход двухкоординатного регистратора 12, Па второй вход регулятора 5 с помощью задатчика 6 подают сигнал, иропорцнсналыгый заданной вел11чине скорости изг ;енг;ния давления, в результате чего на выходе регулятора 5 формируется сигнал, поступающий через позиционер 1 I в управл пощую камеру переменпой пневмсемкости 9
и обеспечивающий с помощью изменения ее объема заданную ва..гчину скорости изменения давления,
При достижении величиной давления Р во входной камере исполнительного механизма 3}-1ачеиия Р, , соответствующего началу перемещения его ной системы, начинается увеличение объема его входной компенсируемое с помощью регулятора 5 эквивалентным уменья1ением величины объема пневмоемкости 9 (фиг,2/1 При дос тижении величиной давления Р -значения Р|,. соответств-ующего концу пере- мещения ПОДВГ-БКНОЙ систе --1ы исполнительного механизь;а, увеличенное объема входной камеры прекращается и, соответственно, прекраптется изменение объема пневмоемкости 9, При достижении величиной давления Р пределького
значения например
1,25 кгс/см -, соответствующего значению задания задатчика 22. срабатывает элемент 21 сравнения блока 3 переключения и на его выходе формиру-
1
s 0 5 о
5
0
5
0
5
586
ется сигнал 1, поступаюицп в унрлл- ляющую камеру реле 14 блока 2 и а третий вход регулятора 5, При этo элеме1 т 21 блокируется споим выходным сигналом; реле 4 сое диняет выходной канал 7 устройства через проточную камеру элемента 18 сравнения, дроссель 19 с атмосферой, регулятор 5 переключается на режим обратного хода (регулирования скорости уменьшения величины давления). При давлении, равном атмосферному, работа устройства прекращается, чего тумблером 4 питания снимается питание с BXODOB блоков 1 и 3 При зтом элемент 21 сравнения блока 3 переключения деблокируется, и схема приходит в исходное состояние.
Как при прямом, так и обратном ходе на второй вход двухкоординатного рег1- стратора 12 поступает БЫХОД ГОЙ сигнал с дат чика 0 положеь пк, в результате чего на нем фиксируется зависимость текущим значеглем давления Р в выходном канале 7 устройства и величиной пвремев(б ния подвижной системы пневмее кости S.
Па фиг,2 представлен типовой вид зависимости Р i4S). где Рц, Р i: - давление во входной камере Ifii, соот- ,тстству ;11цее нa aJ Iy и коядз псре.меще- ПИЯ его подв1и«но11 систе:- ы: Й, ,S .- величи 1Ы5 характсрлзхтощие положение подв -1жной системы еь кости при Р Р„ и р. Г,.
Анализ пoлyчae ;oгo графика позволяет г определить крайние точки ходовой характер11стнки испо.мнлтельного механизма (точки a,BJ; получить промежуточные точки ходовой характеристики (участок а-в); . визуально оцепить форму ходовой характеристики и ее изменение в процессе эксплуатации (сравнение участков а-в характеристик, полученных на разных этапах эксплуатации) ; оценить нлавгюсть хода подвижной системы №1 по наличию им- пульсяых выбросов на участке a-D при затираниях системы, например точка (Р,, fJ.
Формула изобретения
Устройство для дмстанционног о контроля состояния пневматических аналоговых исполнительных мехглпгтмов, содержащее стабилизатор давления воздуха.-, блок постоянного массового расхода с узлами подачи и сброса воздух и реле, выход которого соединен с выходным каналом, вход узла подачи воздуха с выходом стабилизатора давления воздуха, управляющий вход реле - с выходом блока переключения, связанного информационным входом с выходным каналом, а питающим входом с тумблером и с питающим входом стабилизатора давления воздуха, блок .дифференцирования, вход которого сообщен с выходным каналом, к которому подключен один вход регистратора, причем выходы узлов подачи и сброса воздуха соединены с соплами реле, отличающееся тем,, что, с целью расширения функциональных возможностей путем контроля параметров ходовой характеристики исполнитель
ного механизма, устройство дополнительно снабжено регулятором скорости изменения давления, один информационный вход которого связан с задат- чиком, и переменной пневмоемкостью, выполненной в виде привода, снабженного позиционером и датчиком положения, причем второй информационный вход регулятора скорости изменения давления связан с выходом блока дифференцирования, переключающий вход регулятора соединен с выходом блока переключения, выход регулятора сообщен с входным каналом позиционера, второй вход регистратора связан с выходом датчика положения, а управляющая полость привода сообщена с выходньш каналома

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного контроля пневматических исполнительных механизмов | 1984 |
|
SU1275378A1 |
| Система регулирования температуры теплоносителя двигателя внутреннего сгорания | 1991 |
|
SU1813893A1 |
| Устройство для измерения объемной скоростиКРОВОТОКА | 1978 |
|
SU827024A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДОЗИРОВАНИЯ ЖИДКОСТЕЙ НА БАЗЕ МЕМБРАННОГО НАСОСА | 2016 |
|
RU2628984C1 |
| Пневматическая система управления | 1987 |
|
SU1552150A1 |
| Устройство для управления доильным аппаратом | 1988 |
|
SU1655391A1 |
| Весовой дозатор дискретного действия | 1989 |
|
SU1672230A1 |
| Устройство дистанционного контроля пневматических исполнительных механизмов | 1986 |
|
SU1439536A1 |
| ЙЛТГИТПО- .д'^^' тг;ХНйЧБС1;дя ^^БИБЛИОТЕКА | 1970 |
|
SU261787A1 |

Изобретение относится к пневмоавтоматике, в частности к устройствам диагностики состояния пневматических исполнительных механизмов. Целью изобретения является расширение функциональных возможностей устройства путем контроля параметров ходовой характеристики исполнительного механизма. Устройство для дистанционного контроля состояния пневматических аналоговых исполнительных механизмов содержит стабилизатор давления воздуха 1, блок постоянного массового расхода 2 с узлами подачи и сброса воздуха, выход которого соединен с выходным каналом 7, первый вход - с выходом стабилизатора давления воздуха 1, а второй вход - с выходом блока переключения 3, связанного своим информационным входом с выходным каналом 7, питающим входом - с тумблером 4 и с питающим входом стабилизатора давления воздуха. Вход блока дифференцирования 13 сообщен с выходным каналом 7, к которому подключен один вход регистратора 12. Один информационный вход регулятора скорости изменения давления связан с задатчиком 6. Переменная пневмоемкость 9 выполнена в виде привода, снабженного позиционером 11 и датчиком положения 10. Второй информационный вход регулятора связан с выходом блока дифференцирования 13, переключающий вход регулятора сообщен с позиционером 11. Второй вход регистратора 12 связан с выходом датчика положения 10, а полость переменной пневмоемкости сообщена с выходным каналом 7. 2 ил.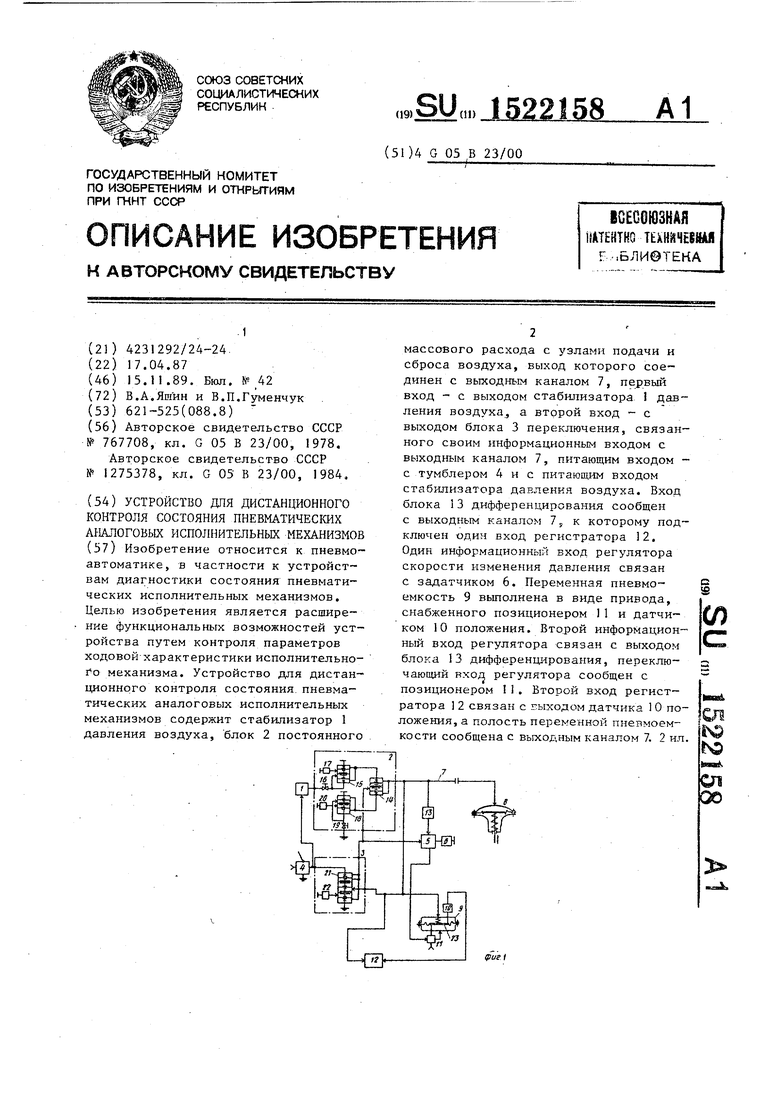
Ри -
Редактор Т.Парфенова
Составитель Н.Ланин
Техред А.Кравчук Корректор Э.Лончакова
Заказ 6961/44
Тираж 788
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
В
5я S
фиг. 2
Подписное
| Способ контроля аналоговых пневматических исполнительных механизмов | 1978 |
|
SU767708A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ дистанционного контроля пневматических исполнительных механизмов | 1984 |
|
SU1275378A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
