Изобретение относится к способам дистанционного контроля исполнитеитьных устройств систем управления и может быть использовано в химической, нефтехимической и смежных отраслях промьплг енности для периодического дистанционного контроля состояния пневматических исполнительных межанизмоВ; управляющих работой регулирующих органов.
Целью изобретения является повышение точности способа дистанцион-- . ного контроля пневматических исполнительных механизмов.
С тдность способа заключается в зависимости изменения давления во входной камере ИМ Р/ от положения его подвижной системы при подаче или сбросе сжатого газа с постоянным массоЕ1Ын расходом. До начала и после заве ршения движения подвижной системы давление во входной камере ИМ изм.еняется с постоянной скоростью, а во время перемещения скорость изменения даления резко падает, поскольку изменение массы сжатого газа, во входной камере сопровождается изменением ее объема v л
На фиг, 1 представлены графики изменения во времени величины давления во входной камере НМ (P,-t)- и скорости изменения давления в ней (dP/dt; -t) при подаче сжатого газа с.постоянным массовым расходом, на фиг, .2 - блок-схема устройства, peaлизующего предлагаемый способ.
Участок I (фиг.1) соответствует состоянию до начала перемещения системы НМ () 5 участок II - пере- мещению (рабочему ходу) подвижной сист«гмы НМ из одного крайнего положения в другое. При этом объем входной камеры НМ изменяется от v до у| Участок III соответствует состоянию после прекращения перемещения подвизкной системы (v v,.). Границы участков I-IIIj II-III - (фиг„16) характеризуются импульсными выбросами (скоростная характеристика). Проекция этих выбросов (фиг.1 а) позволяет ..определить давления во входной камере НМ Рц и Р, соответствующие началу и концу перемещения подвижной системы (крайние точки ходовой характеристики им), Нормальному (плавному) перемещению подвижной, системы НМ соответствует непрерывное убывание или возрастание (соответственно при прямом и обратном ходе) скорости изменения давления на участке II, Неравномерность движения, затирание подвижной системы характеризуются появлением точек излома на участке II скоростной характеристики, Проекция этих точек (фиг.1 ) позволяет определить участок ходовой характеристики, на котором отмечается затирание подвижной системы,Таким образом могут быть проконтролированы основные показатели, характеризующие состояние. НМ, во всем ра бочем диапазоне5 причем длина импульсных линий связи не влияет на точность контроля, так как величина массового расхода может быть выбран.а таксис чтобы время изменения давления во входной камере Hti от Р 0 О до р. Pf,p существенно превышало время транспортного запаздьшания импульсной линии,
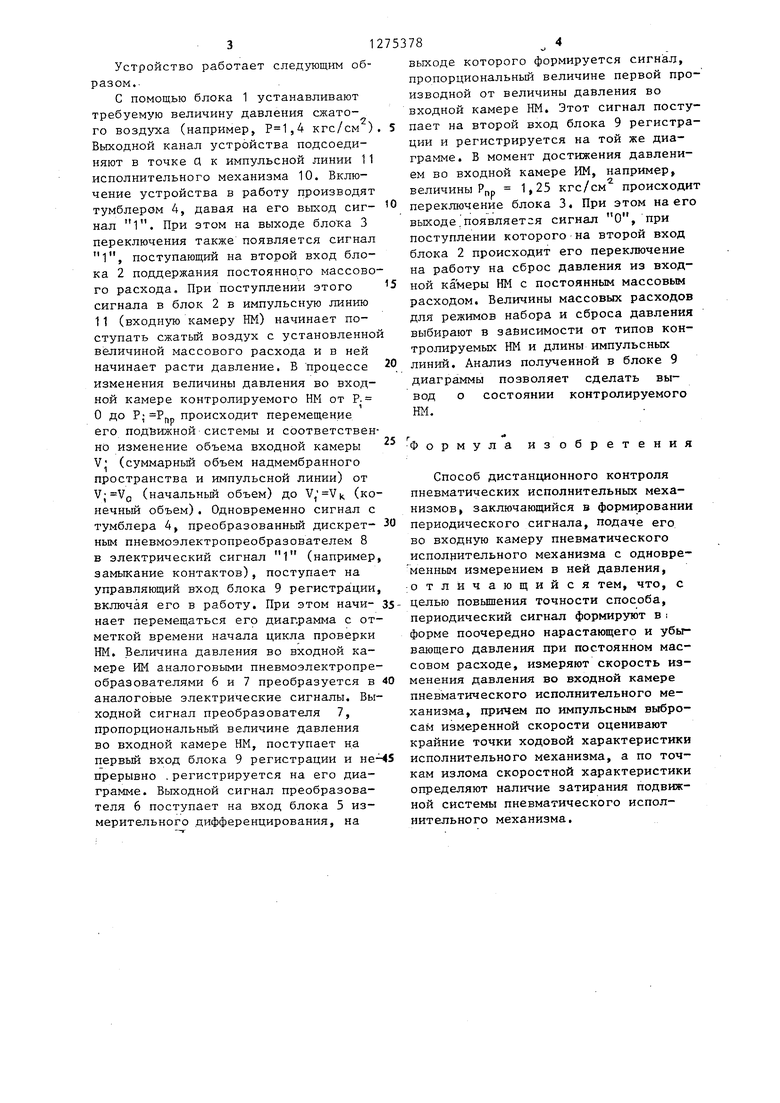
Устройство содержит блок 1 стаби2 лизации давления сжатого воздуха, блок 2 поддержвания массового расхода, блок 3 переключения, тумблер 4, блок 5 измерительного дифференцирования j аналоговые электропневмопре-. образователи 6 и 7, дискретный пневмоэлектропреобразоЕатель 8, блок 9 регистрации, исполкителъньй механизм также импульсную линию НМ 11 , Выход блока 1 подсоединен к пер- вому входу блока 2 поддержания постоянного массового расхода, первый выход которого с атмосферой, а второй в точке а подсоединен к импульсной линии 11 исполнительного механизма 10 и является выходным-каналом устройства. Второй вход блока 2 подключен к выходу блока 3 переключения, первый вход которого соединен с выходньп каналом устройства а второй - с выходом туг блера 4„ Выходы аналоговых пневмозлектропреобразователей 6 и 7 соединены межд,у собой и подк.пючены к выходному каналу устройства. Выход преобразователя 7 подсоединен к первому ® входу блока 9 регистрации. Выход преобразователя 6 подключен к входу блока 5 измерительного Д1.;фференцирования, выход которого подсоединен к-второму входу блока 9 регистрации. 5 Вход дискретного пневмоэлектропреобразователя 8 подключен к выходу тумблера 4, а выход - к управляющему входу блока 9 регистрации. Устройство работает следующим образом.. С помощью блока 1 устанавливают требуемую величину давления сжатого воздуха (например, ,4 кгс/см ) Выходной канал устройства подсоединяют в точке а к импульсной линии 11 исполнительного механизма 10. Включение устройства в работу производят тумблером 4, давая на его выход сигнал 1. При этом на выходе блока 3 переключения также появляется сигнал 1, поступающий на второй вход блока 2 поддержания постоянного массово го расхода. При поступлении этого сигнала в блок 2 в импульсную линию 11 (входную камеру НМ) начинает поступать сжатый воздух с установленно величиной массового расхода и в ней начинает расти давление, В процессе изменения величины давления во входной камере контролируемого НМ от Р. О до Р; Р(,р происходит Перемещение его подвижной системы и соответствен но изменение объема входной камеры V (суммарньй объем надмембранного пространства и импульсной линии) от (начальньй объем) до (ко нечный объем). Одновременно сигнал с тумблера 4, преобразованньй дискретным пневмоэлектропреобразователем 8 в электрический сигнал 1 (например замыкание контактов), поступает на управляющий вход блока 9 регистрации включая его в работу. При этом начи- 35 нает перемещаться его диаграмма с отметкой времени начала цикла проверки НМ. Величина давления во входной камере ИМ аналоговыми пневмоэлектропреобразователями 6 и 7 преобразуется в 40 аналоговые электрические сигналы. Выходной сигнал преобразователя 7, пропорциональньш величине давления во входной камере НМ, поступает на первьш вход блока 9 регистрации и не-45 прерывно .регистрируется на его диаграмме. Выходной сигнал преобразователя 6 поступает на вход блока 5 измерительного дифференцирования, на выходе которого формируется сигнал, пропорциональньш величине первой производной от величины давления во входной камере НМ. Этот сигнал поступает на второй вход блока 9 регистрации и регистрируется на той же диаграмме. В момент достижения давлением во входной камере ИМ, например величины РПР 1,25 кгс/см происходит переключение блока 3. При этом на его выходе.появляется сигнал О, при поступлении которого на второй вход блока 2 происходит его переключение на работу на сброс давления из входной камеры НМ с постоянным массовым расходом. Величины массовых расходов для режимов набора и сброса давления выбирают в зависимости от типов контролируемых НМ и длины импульсных линий. Анализ полученной в блоке 9 диаграммы позволяет сделать вывод о состоянии контролируемого НМ. Формула изобретения Способ дистанционного контроля пневматических исполнительных механизмов, заключающийся в формировании периодического сигнала, подаче его во входную камеру пневматического исполнительного механизма с одновременным измерением в ней давления, отличающийся тем, что, с целью повышения точности способа, периодический сигнал формируют в i форме поочередно нарастающего и убывающего давления при постоянном массовом расходе, измеряют скорость изменения давления во входной камере пневматического исполнительного механизма, причем по импульсным выбросам измеренной скорости оценивают крайние точки ходовой характеристики исполнительного механизма, а по точкам излома скоростной характеристики определяют наличие затирания подвижной системы пневматического исполнительного механизма.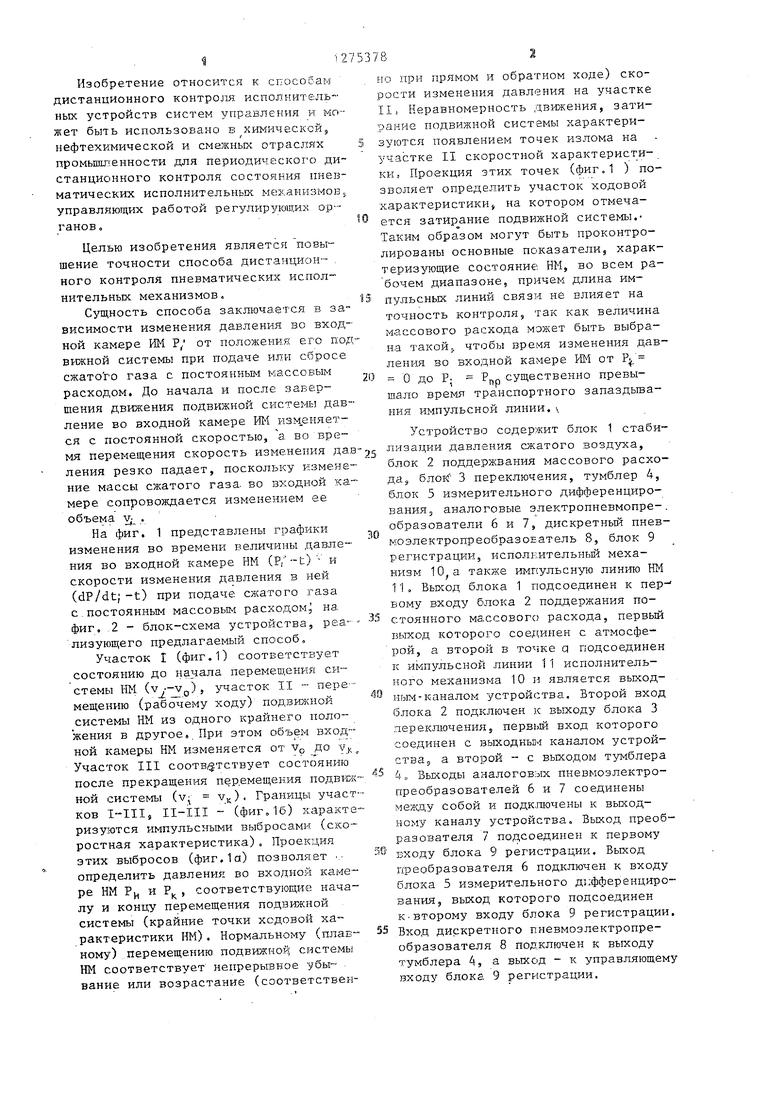
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного контроля пневматических исполнительных механизмов | 1986 |
|
SU1439536A1 |
| Устройство для дистанционного контроля состояния пневматических аналоговых исполнительных механизмов | 1987 |
|
SU1522158A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1970 |
|
SU288439A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Устройство для измерения объемной скоростиКРОВОТОКА | 1978 |
|
SU827024A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ГАЗА | 2011 |
|
RU2476829C2 |
| Способ трехосного измерения воздушной скорости | 2020 |
|
RU2765800C1 |
| Трехосный измеритель воздушной скорости | 2020 |
|
RU2762539C1 |
| Устройство для управления пневматическими задатчиками в системах регулирования и контроля технологических объектов | 1980 |
|
SU868705A1 |
Изобретение относится к системам управления. Целью изобретения является повьппение точности способа.Сущность способа заключается в подаче во входную камеру наполнительного механизма (НМ) поочередно нарастающего и убывающего давлений при постоянном массовом расходе. Крайниеj точки ходовой характеристики НИ находят по импульсным выбросам скорости изменения давления во входной камере, а по точкам излома скоростной характеристики определяют наличие затирания подвижной системы НМ. 2 нл.
Фиг. г
| Устройство для управления реверсивным электроприводом | 1978 |
|
SU767706A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
