(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ
ВРАЩЕНИЯ И МОМЕНТА АСИНХРОННОГО
ЭЛЕКТРОДВИГАТЕЛЯ
1
Изобретение относится к электротехнике и может быть использовано в высокоточных следящих цифровых системах, в системах автоматического управления и в электроприводе.
Известно устройство для управления асинхронным электродвигателем, в котором использованы .обратные связи по току и по скорости и два- канала по напряжению и по частоте 1.
В данном устройстве регулирование момента осуществляется только в одной области изменения скорости.
Наиболее близким техническим решением к. изобретению является цифровое устройство для регулирования скорости и момента асинхронного электродвигат еля, которое содержит последовательно соединенные между собой формирователь импульсов, входом подключенный к сети, и син(.ронизатор, преобразователь код-временный интервал, включающий реверсивный счетчик, выходы которого через схемы И подключены к входам счетчикамодулятора, генератор импульЬов, выходом подключенный к другим входам счетчика-модулятора и синхронизатора, триггера-реверса, вход которого соединен с выходом реверсивного счетчика, триггермодулятор, подключенный входом к выходу счетчика-модулятора, последователь но соединенные между собой управляемый узел задержки импульсов, триггер тактовой частоты, модулятор управляющего сигнала и усилитель постоянного тока. Выход триггера-реверса подключен ко второму входу модулятора управляющего сигнала, третий вход которого связан с
10 выходом триггера-модулятора (2}.
Недостатком данного устройства является малый диапазон регулирования скорости вращения, в котором сохраняется номинальным, .Это объясняется тем, что с уменьшением скорости вращения
15 электродвигателя момент на его валу также уменьшается, что приводит к колебаниям ротора в областях низких скоростей электродвигателя.
Цель изобретения - расширение диа20 пазона регулирования скорости вращения
и момента асинхронного электродвигателя.
Указанная цель достигается тем, что
в цифровое устройство для регулирования
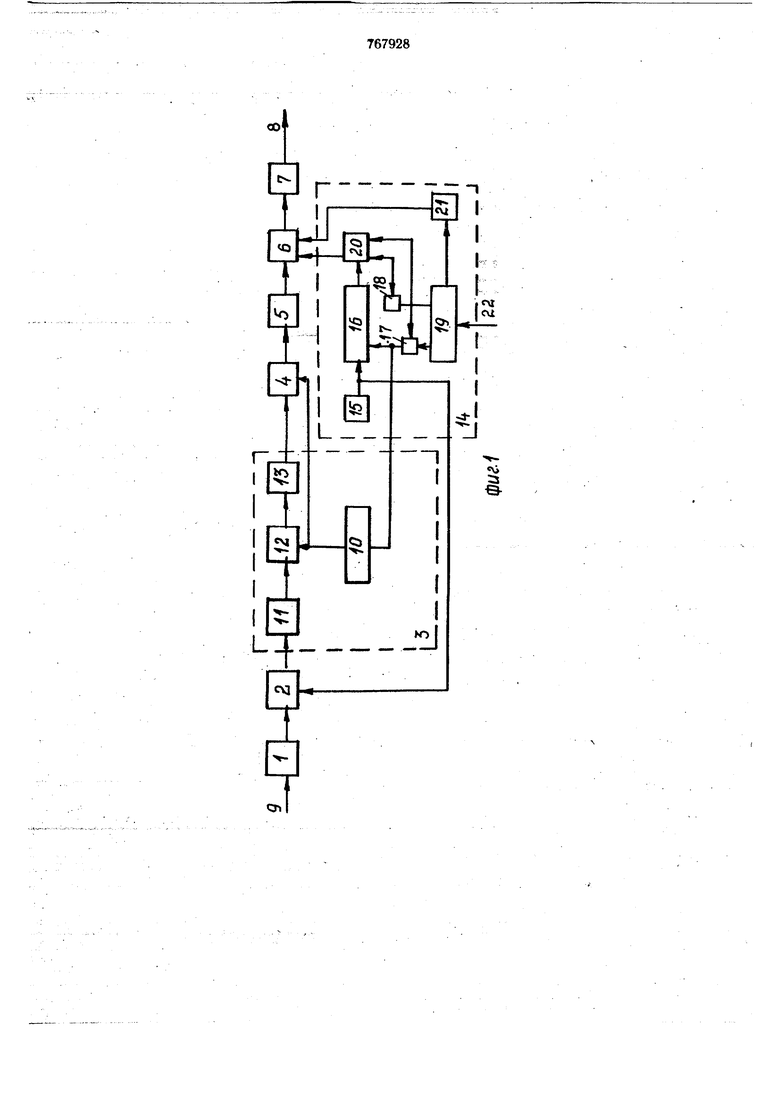
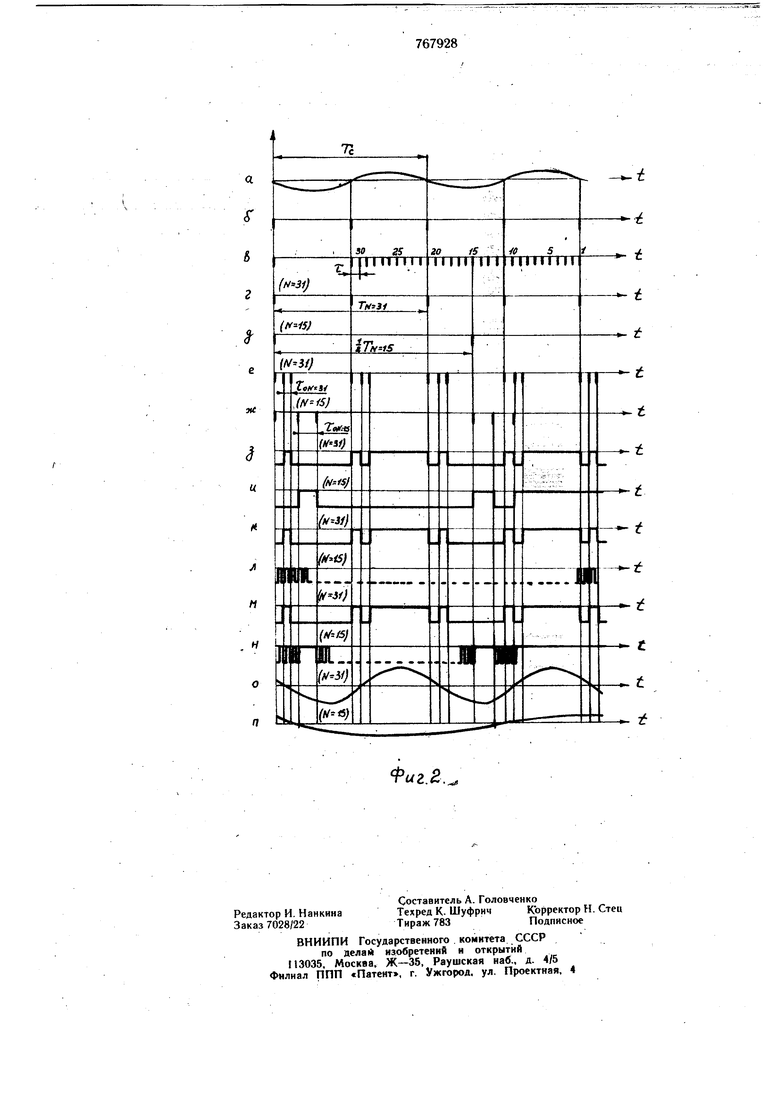
скорости вращения и момента асинхронного электродвигателя введен преобразователь с управляемой задержкой импульсов, содержащнй дешифратор, входом подключенный к одной из схем И преобразователя, код-временный интервал, последовательно Соединенные между собой линию задержек, схему И, схему ИЛИ, причем вход линии задержек соединен с выхо. синхронизатора, выход схемы ИЛИ подключен к одному входу управляемого узла задержки импульсов, другой вход которого связан ; выхоДй5л дешифратора, подключенным ко второму входу схемы И преобразователяс уг1ра;вляемой задержкой импульббб. : На фит. 1 представлена блок-схема цифpdebfd устройств а для регулирования скорости вращения и момеита асинхронного электродвигателя; на фиг. 2 - диаграммы, поясняющие работу цифро&ого устройства. Цифровое устройство для регулирования с орйсТйВращения и момента асинхронного электродвигателя содержит последовательно соединенные между собой формироватеЛь 1 импульсов {фиг. 1) и сии)сронизатор 2, преобразователь 3 с управляемой затяжкой импульсов, управляемый узел 4 задержки; триггер 5 та кто- вой частоты, модулятор 6 управляющего сигнала, усилитель 7 . постоянного тока, выход которого подключен к обмоткам 8 асинхронного электродвигателя. Вход формирователя I импульсов подключен к сети 9 перёмёиного тока. Преобразователь 3 с управляемой задержкой импульсов включает в себя дешифратор 10 иПоследовательно сЬединенньге между соб9Й лишш I задержек, схему 12 И и схему 3 ИЛИ. В состав устройства входит преобразователь 14 код-временный интервал, включающий генератор 15 импульсов, выход ifcOTOporo подключён к одному из входов счетчика-модулятора 16, к другим входам которого через схему И 17 и 18 ЙоДкл оче ны Выходы рёйёрсйвйото- счетчина 49 преобразователя код-временный интервал. Выход счетчика-модулятора 16 подключен к одному йходутриггера-модулятора 20, другие входы которого подключеиьГк схемам И 17 и 18 собтв ётственно, а выход триггера-модулятора связан с одйим из аходов модулятора 6 управляющего сигнала, другой вход которого подключей к выходу триггера-реверса 21, входом соединенный с одйим, из выходов рейерсизного счетчика 10 преобраз&вателя кодвременный интервал.,,-, Устройство работает след тещим обрж ом. - , Управляющий параллельный двоичный код 22 поступает однобременно на входы преобразователя i4 код-временный ийтер йал и преобразователя . 3 с управляемой задержкой Через реверсивный двоичный счетчик 19 и схемы 17 И. С одиой стороны код 22, пройдя функциональные элементы преобразователя 14 код-временный интервал, преобразуется иа выходе триггера-модулятора 20 в широтиоимпульсную модуляцию (ШИМ) прямоугольных импульсов (фиг. 2 к, л), скважность которых меняется от нуля до единицы в зависимости от кода 22. Частота ШИМ выбирается настолько большой (Ршин 1,5 кГц), что управляющее напряжение Uy, подводимое к электродвигателю за счет фильтрующих свойств индуктивности рассеяния электродвигателя в достаточной степени сглаживается (фиг. 2 о, п). В итоге сигнал ШИМ, снимаемый с выхода триггера-модулятора 20, пройдя модулятор 6 управляющего сйгИала и усилитель 7 постоянного тока,представляет собой среднее значение напряжения управления .Uy, с помощью которого осуществляется амплитудное управление скоростью асинхронного электродвигателя. С другой стороны параллельный двоичный код 22 с выхода реверсивного счетчика 19 через схемы 17 И преобразователя 14 код-временный интервал поступает на вход преобразо1вателя 3., На выходе преобразователя 3 формируется серия импульсов, которая задает частоту fy управляющего иапряжеиия, подводимого-к электродвигателю. Формирование серии импульсов на выходе преобразователя 3 происходит следующим образом. Импульсы, полученные формирователем Г при переходе через Нуль синусоидального иапряжеиия сети 9, пройдя синхронизатор 2, который необходим для. синхронизации сети 9 с импульсами генератора 15 импульсов, поступают на входы линий, II задержек. Линии И задержек построены таким образом, чтобы на каждом выходе линии задерж ек формировалась частота fy в определенной зависимости от управляющего кода 22.. i ДисКретиость зависимости частоты у зависит от величины управляющего кода 22, т. е. она зависит от количества разрядов-. в счетчике 19. /; Эта зависимость выбирается таким образом, чтобы момент при изменении ckoрости вращения электродвигателя сохра нялся неизменным, то есть подбирается отношение Uy/f const, V , ч . ; Дальнейшее прохождение импульсов с выхода линий 11 задержек рсуществлйется путем открытия дешиф{ атс рОм 10 12 И. Пркг определенном коде 22, например, N 15 (фиг. 2 д), дешифратор 10 через схему 12 И открывает только одну из линий П задержек. ТЬгда выход схемы 12 И через схему 13 ИЛИ на вход упрайляющего узла 4 задержки поступает серия импульсов с периодом Т,Таким образом, серия импульсов, получаемая на выходе схемы 13 ИЛИ преобразователя 3, предназначенная для задания частоты подводимого напряжения U к электродвигателю, осуществляет управление моментом асинхронного электродвигателя. Управляемый узел 4 задержки импульсов предназначен для формирования нулевой паузы путем задержки серии импульсов (фиг. 2 е, ж), поступающих с выхода схемы 13 ИЛИ преобразователя 3. Управляющий узел 4 задержки импульсов состоит из линий задержек, которые управляются дешифратором 10. На выходе управляемого узла 4 задержки импульсов организуется серия импульсов необходимой частоты fy и нулевой паузы « (фиг. 2е, ж). С выхода управляемого узла 4 задержки импульсов импульсы поступают на вход триггера 5 тактовой частоты, на выходе которого образуется перепад напряжений (фиг. 2 3, и), который подводится, на один из входов модулятора 6 управляющего сигнала. Необходимо отметить, что перепад напряжения, образованный на выходе триггера 5 тактовой частоты, представляет собой только форму (фиг. 2 3, и) управляющего напряжения с заданной частотой и величиной нулевой паузы тр. Для того, чтобы этот сигнал (перепад напряжений на выходе триггера 5 тактовой частоты 5) нес информацию и о величине (амплитуде) управляющего напряжения и, на другой вход модулятора 6 управляющего сигнала от триггера-модулятора 20 поступает ШИМ (фиг. 2 к. Л). Модулятор 6 управляющего сигнала конструктивио представляет собой логическую «хему И-И.ПИ. В модуляторе 6 управляющего сигнала происходит модулирование сигнала ШИМ прямоугольными перепадами напряжения, поступающие с выхода триггера 5 тактовой частотц (фиг. 2 м, н). После модуляции на выходе модулятора 6 управляющего сигнала в соответствии с кодом 22 организуется управляющий сигнал заданной амплнтуды, частотЬ и нулевой паузы. Таким образом, изменяя од 22 можно управлять скоростью н Моментом двигателя/ поддерживая Uj/t const. Реверс электрЬдвигателя осуществляется триггером 21 путем подключения к .модулятору управляющего сигнала 6 еднничного или нулевого выходов триггера 5 тактовой частоты 5.л Таким образом, предлагаемое устройство позволяет увеличить диапазон регулнровання скорости вращения асинхронного электродвигателя путем варьирования па{ аметров управляющего сигнала подврдймого к электродвигателю. В частности, поддержание соотнощения lJy/tj const, которое эквивалентно регулированию велнчины момента электродвигателя, имеет первостепенное значение, когда к устройству предъявляются требования высокой точности, надежности при переменной нагрузке, прикладываемой к валу электродвигателя. Формула изобретения Устройство для регулирования скорости вращения и момента асинхронного электродвигателя, содержащее последовательно соединенные между собой формирователь импульсов, синхронизатор, преобразователь код-временный интервал, включающий реверсивный счетчик, выходы которого через схемы И подключены к входам счетчикамодулятора, генератор импульсов, выходом ; подключенный к другим входам счетчика-модулятора и синхронизатора, триггера-реверса, вход которого соединен с выходом реверсивного счетчнка, триггермодулятор, подключенный входом к вы-, ходу счетчика-модулятора, последовательно соединенные между собой управляемый узел. задержки импульсов, триггер тактовой частоты, модулятор управляющего сигнала и усилитель постоянного тока, выход триггера-реверса подключён ко второму входу модулятора управляющего сигнала, третий вход которого связан с выходом триггера-модулятора, отличающееся тем, что, с целью расщнрения диапазона регулирования скорости вращения и момента асинхронного электродвигателя, устройство снабжено преобразователем с управляемой задержкой импульсов, содержащим дешифратор, входом подключенный к из о ем И преобразователя код-временный интервал, последовательно соединенные между собой лннию задержек, схему И, схему ИЛИ, причем вход линии задержек; соединен с выходом синхронизатора, выход схемы ИЛИ подключен к одному входу управляемого узла Задержки импульсов. Другой вход которого связан с выходом дешифратора, йодключенным ко второму входу схемы И преобразователя с управляемой задержкой импульсов. Источники информации, принятые во внимание при экспертизе I. Автоматизированный электропривод. Электротехнология. Электроснабжение. Силовая преобразовательная, техника. «Экспресс-ннформация. М., 1975, № 32, с. 1-3. 2. Авторские свидетельство СССР по завке № 2064708/24, кл. Н 02 Р 7/42.
5 2
е
ж
и
н
иг.г..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости вращения и момента асинхронного электродвигателя | 1980 |
|
SU949766A2 |
| Частотно-регулируемый электропривод с широтно-импульсной модуляцией | 1982 |
|
SU1310987A1 |
| Устройство для цифрового управления асинхронным двигателем | 1974 |
|
SU688974A1 |
| Устройство для поверки цифровых измерителей девиации фазы | 1990 |
|
SU1781651A1 |
| Устройство для моделирования излучений гетеродина приемника | 1981 |
|
SU972525A1 |
| Многоканальный регулятор температуры | 1991 |
|
SU1783495A1 |
| Устройство для управления автономнымиНВЕРТОРОМ | 1979 |
|
SU830631A1 |
| Устройство для управления трехфазным мостовым инвертором | 1984 |
|
SU1297194A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1654973A1 |