Изобретение/отноантся « измерительной технике в машиностроевви, а именно к средствам ичля контроля зубчатых колес.
Известен способ и. устройство для контроля кинематической погреш носии зубчатых s колес, содержащее два соосно расположенных шпииделя, на которых закреплены измерительные колеса, третий штиидель с «оитролируемьш жолеоом, ки«амат.ичесК|И связанным с измерительными колесами, и Ю peo6pa3OiBaTe H угловых перемещений 1. Недостатком 1извбст1ного устройства является иевыоокая тачиость преобразователей угловых Т1ере(мещений.
Из1вест.нотакже устройство для коятро- 15 ля иинемапической потрешлоспи зубчатых колес, содержащее «орШус, два соосно рас- положенных шпинделя, наодном «s которых закреплено из1мерительное, а да другом контролируемое колеса, третий шпиндель .; 20 промежуточным колеоо)м, таииемлтичесюи связан;ны1м С измерительным и контр-олируемым колесами, и фотоэлектрический преобразователь угловых перемещений |2. При этом фотоэлектрический преобразователь 25 угловых перемещений вьшолиен в шшвде яласт1и«ы с «осой щелью, жестко связанной со щпИНделем ко;нтрол1И1руемого :колеса, .неподвижной, пластины с вертикальной щелью, ра сположбнной «а расстоянии вид имотх) за- 30
зора от перкой, Освепителя и равномерно перемещающейся светочувстнитрльной -ленты, устано;вле.нных по ра1зные стороны от указанных пластин.
Недостатком известного устройства явЛ1яется низкая точность контроля кинематической попрешнОСти . зубчатых колес, обусловленная невысокой точностью преобразователя угловых перемещений.
Цель изобретения -;- повышение точности контроля.
Указанная цель достигается тем, что преобразователь угло1вых перемещений выполнен в виде интерферометра со еветоделительной пластиной и дву1мя опорными зеркалами, из которых установлено на щпинделе контролкруемого колеса, другое - на корпусе с возможностью углового ; колебания.
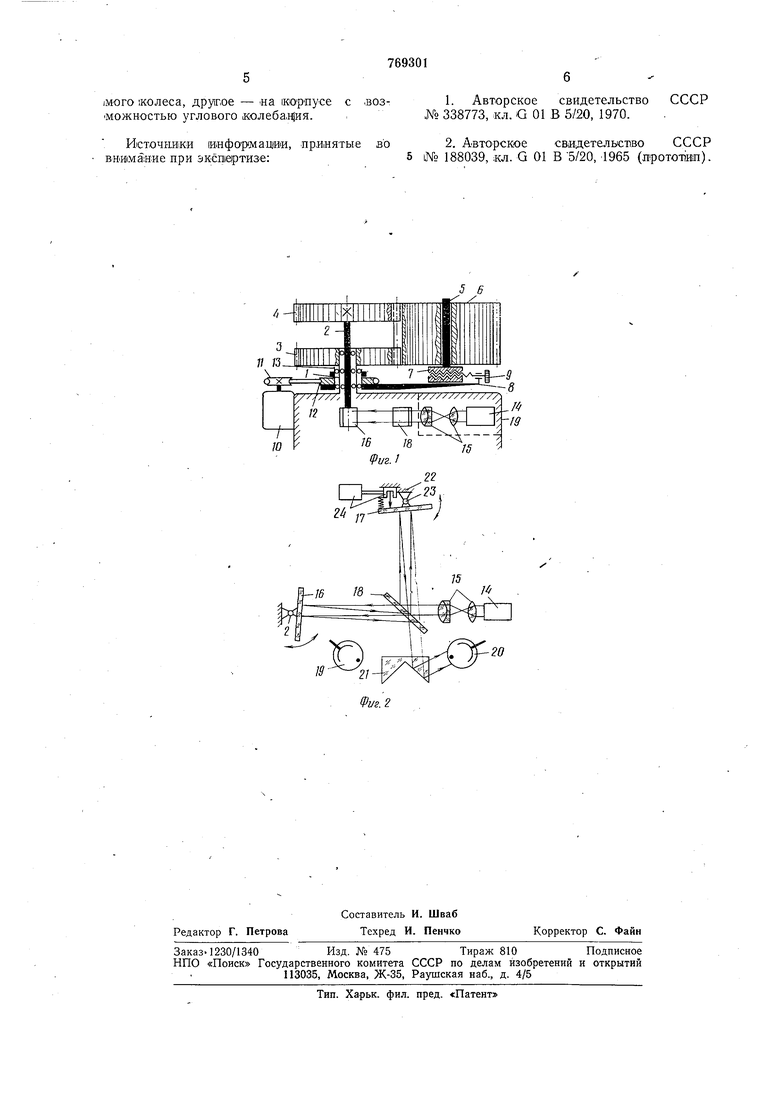
На фиг. 1 представлена иинвмат1ическая схема устройства; на фиг. 2 - схема оптической части преобразователя угловых перемещений с картиной хода лучей при различных по знаку угловых перемещений с картиной хода лучей при различных по знаку угловых положениях опорных зеркал.
На два соосно расположенных щпинделя / |И 2 (фиг. 1) закрепляются соответственно измерительное 3. и конт1ролируе;мое 4 колеса. При этом щтпиндель зубчатого кол-е а 3 неподвижен, а шпиндель 2 зубчатого колеса 4 может по1В01раЧИ,ваться в небольших пределах отн осйтельно ,непод виж,ного.
На ШПйнделе. 5 закрепляется прамежуто-ч«ое зубчатое -калеоо 6 с любым числом зубьев, но одного модуля, что и зубчатые колеса и 4.
Шпиндель 5 установлен ,на каретке. 7, закренлениой иа водЕле ,8, межцентровое расстоядие между ося1М1И1 зубчатых .колос 3, 4 я 6 при измерелии |уста.навл1И1вается по блоку ;ко:н1Девых мер .пут1е;м :перемеш,ени.я .каретки .7 с помош,ыо ;винта 9 по .направляюш, 1вод1ила 5. Ко.нпролнрубмое колесо 4 сОВместио с и.з1мер|ИтельнЫМ 3 приводится в п.ла.нетар.ное защен-ление €.широким про|МежутОЧны.м колесом 6. С целью обеспече.ния контакта -между сопрягавмы.м-и зубьями при обкатке .в устроЙ Стве ;предуамотр1ен юиловой контролируемого .колеса 4 к зубьям промежуточного колеса 6 (на -чертеж.е ,не ноказа.н). Лланета.рное движение колеса 6 осуш,ествляетоя .при помощи электродвигателя 10 и ;кл.и.норем1енной -передачи, один 1ИЗ .шживо 11 ,ко.торый закреплен на валу ротора элект1родвигателя 10, а .другой-/2-.на ступище 13 водила 8 соо-сно со шшинделем 2.
Прео5разО|Ватель угловых П1еремеш,ений (фиг.2) содержит Ооветитель 14, например лазер, телескопическую-аисте.му 15, опо.рные .зеркала 16 и /7 и светоделительную .пластину /§, фот10.приемнм.ки 19 и 20 и светоде.литель.н1ую призму 2,1.
Для обеспечения .в.озмож.наст1и измерения угловых перемещени.й одно опорное эер|Кало 16 закреплено на конце шпинделя 2 ко.нтролируемого колеса 4 .с соблю.дением условия .параллельности его .рабочей по-вержности оси вращ.ения шпинделя 2. Второе опорное зеркало 17 установлено на корпусе 22 ПОДВ1ИЖ.НО с осью в.раш,ен1ия 23 параллельной вращения ш.пинделя 2 и 0СНаЩ|ено меха1НИ31МО.м 24 для осуществления требуемого угло.в.ого сканирующего колеба.н.ия.
Выходы фотстрнемников 19 и 20 подклюгчены на в.ходы элект1ронао-(измерительной, регистр.ирующей аппаратуре (на чертеже не показа.на).
УстрОйст;во ра1ботает 1следующ;им образом.
Для измерения и репистрации кинаматической погреш.ности контрол|ирувмое колесо 4 заК)репля1ется на шпинделе 2. Уста.навливается требуемое межцентровое раостояние между осями зубчатых колес 3,4 и 6 по блоку концевых мер путем перемещения каpeTiKH 7, несущей шпиндель 5 -с промежуточным колесом 6, с пом|0.щью винта 9 по натравляющим во..р1ила 8. Включают привод устройства. Обкатьшают в течение одного оборота измерительное «5 .и контролируемое
/ колеса IB планетарном зацеплении с промежуточным колесом 6. В процессе планетар.но.го обката широкое промежуточное колесо 6 непрерывно выравнивает профиль подв|иЖ|Ного контролируемого (Колеса 4 отно сительно профиля неподв.иж.ного .и.змерительного колеса 3.
Несовпадение относительного положения проф.илей, .об-у.сло:влен.ное :К1и.Нематичес.кой погреш.но1стью контроли.руемо.гозубчатого .колеса 4, вызывает п.о.ворот подвижного шпинделя 2 с опорным зеркалом 16, закрепленным на «ем, на величину юинема1ической по.грвщнОС.ти. В результате этого ччсгь светового потока источника 14 света, пройдя через светоделительную пластину 18 и попавщая на зеркало 16, отклонится на некоторый угол. Отраженный луч встретится на, поверхности сйетоделительной пласт,и.ны IS с лучом, отраж1енны1М от .второго опорного зеркала .17. В встречи нарнььх, однородных лучей будет иметь -место интерференционная .картина. Интерференционная .карТ1ина ула.вл1ивается фотоприем.ника-ми 19 и 20 через светоделительную призму 21. Оветоделительная при.зма 21 напра-вляет световой поток после светодел.итель.ной пластины 18 .на тот или другой фотоприемник в зав|исим.ост1и от знака угла поворота опо.р.ных зер.кал 16 и 17.
Изменение светового потока вызывает измспенке фототока, идущего через фотоприем.ни.ки 19 и 20. Сигналы ic фотоириемников поступают на электронно-усилитель: ную и реристрирующую аппаратуру.
Устройство позволяет повысить тс чность .измерения :КИ;немат.ической погрешности зубчатых колес. Это достигается -благодаря переходу -на и-нтерфвренционный способ -из-мерения угловы-х перемещений. Применение колес более высокой .степени точ-ности позволит улучщить т(1ч.ностиые, эксплуатационные и экономические характеристики машин, станков и т. д.
Формула и 3 о- б р е т е .н и я
Устройство для контро-ля жинаматич-ес.кой П01грашности зубчатых колес, со-держащее коршус, .два соо.оно расположенных щп-инделя, .на од-ном из .которых закрепЛеио измерительное, а иа друго.м ко.нтролирувмое ко-леса, третий шп.и.ндель с промежуточным колесом, ;к1И1Нвматическ1и связа.нным с .измерительным и 1контр.о.ли.руемым ко.лесам-и, и фотоалектрический преобразователь угловых перемещений, -от-л.ичающ е е с я тем, что; с щелью повыш.ен)ия точности контроля, преобразователь угловых перемещений BbmoijiiHeH в яиде интерферометра -со светоделительной пластиной и дву|мя оло.рны1ми зеркалами, одно из которых установлено .на .щ-пилделе коитролируеИсточники информации, принятые во внимание при экспертизе:5 i№ 2. Авторское свидетельство СССР 188039, «л. G 01 В5/20,-1965 (протот вп).
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для исследования динамических характеристик зацепления в передачах | 1980 |
|
SU877387A1 |
| Бесконтактный интерферометр | 1977 |
|
SU765648A1 |
| Интерферометр для исследования качества оптических элементов и прозрачных неоднородностей | 1976 |
|
SU625132A1 |
| ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1993 |
|
RU2095752C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ КОНТРОЛЯ ТЕЛЕСКОПИЧЕСКИХ СИСТЕМ И ОБЪЕКТИВОВ | 2012 |
|
RU2518844C1 |
| Интерферометр для измерения линейных перемещений объектов | 1987 |
|
SU1497451A1 |
| УЧЕБНЫЙ ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР | 1998 |
|
RU2154307C2 |
| Интерферометр для измерения углов поворота объекта | 1980 |
|
SU983449A1 |
| ПРИБОР ДЛЯ ПОВЕРКИ И АТТЕСТАЦИИ КРИВОЛИНЕЙНЫХ ЭВОЛЬВЕНТНЫХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU304427A1 |
| Голографический интерферометр | 1991 |
|
SU1835047A3 |
5 6
20
