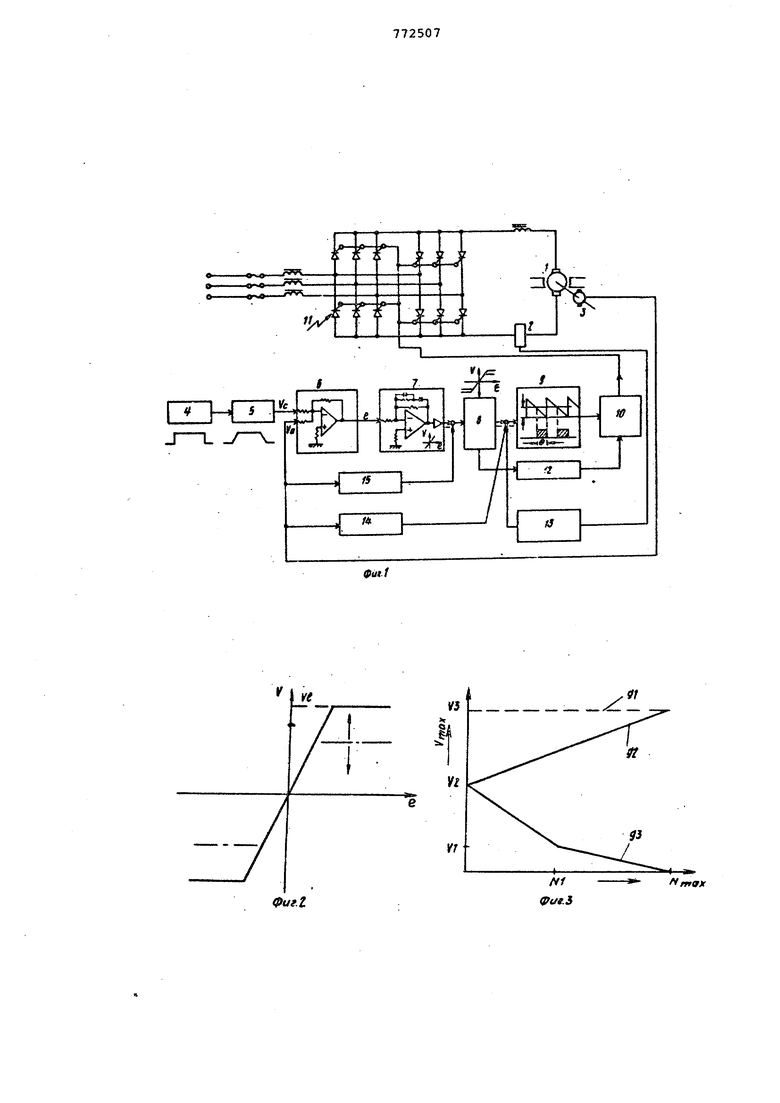
ока. Преобразователь 9 через генеатор 10 импульсов подключен к уп. авляюадим электродам преобразоватея 11. Вход генератора 10 импульсов jepe3 преобразователь 12 знака свяан с блоком 8. Ограничитель 13 свяан с датчиком 2 тока якоря. Устройтво содержит также блок 14 управлеия ускорением и блок 15 управления торможением.
На фиг. 2 изображена зависимость ошибки между заданной скоростью дви гателя и его действительной скоростью от напряжения ошибки, которое подается на схему управления фазным углом зажигания тиристоров.;.
На фиг. 2 абсцисса представляет ошибку е между сигналом требуемой скорости и напряжением обратной связи, а ордината.представляет выходное напряжение J, приложенное к схеме управления фазным углом зажигания. Напряжение V обеспечивается для схемы управления фазным углом зажигания для включения тиристоров при фаз- ном угле, пропорциональном выходному напряжению V, что .будет.описано ниже.
Ошибка е и выходное напряжение V находятся в пропорциональной взаимосвязи друг с другом, но когда ошибка е превышает некоторое значение, выходное напряжение V не может далее возрастать и ограничивается у этого значения. Основная идея изобретения заключена в изменении верхнего предела напряжения ограничения V., напряжения ошибки е,то есть фазного угла зажигания тиристоров, в: зависимости от действительной скорости двигателя постоянного тока. На фиг. 3 показана взаимосвязь между скоростью двигателя (количество оборотов) и.напряжением ограничения ), а абсцисса представляет скорость двигателя, а ордината - напряжение ог1 аничения . Напряжение ограничения У, соответствует максимальному фазному углу ©max фазного угла зажигания
Раньше использовалось напряжение ограничения указанное пунктирной линией g на фиг. 3, у которого во всем диапазоне скоростей двигателя N поддерживался уровень управления V .
С другой стороны, в системе/ настоящего изобретения при ускорении и в установившемся режиме напряжение ограничения устанавливается подверженным линейному изменению от уровня VT. до уровня М в ответ на изменение скорости двигателя N от О до ее максимального значения Nmax .указанному непрерывной линией да на фиг. 3. При торможении установка напряжения ограничения; происходит так/ как показано ломаной линией, например от уровня О до уровня V-, , и затем до уровня V в ответ на изменение скорости двигателя N от максимального значения до О, как показано линией д на фиг. 3.
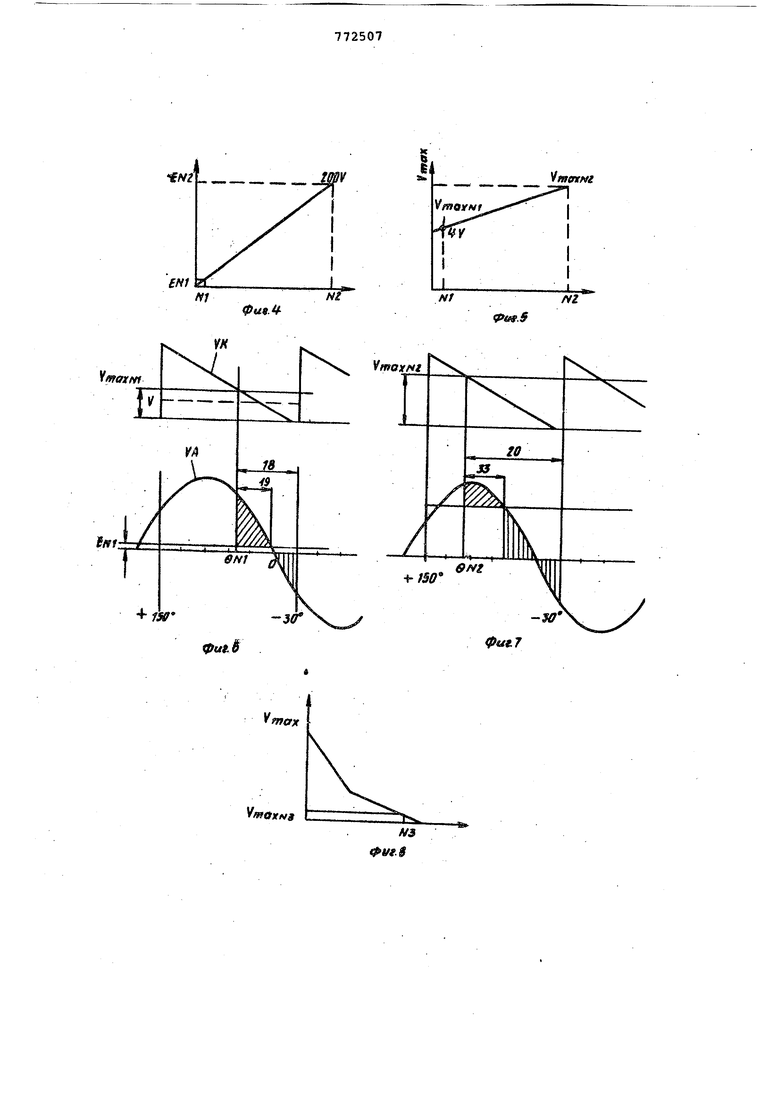
Описания фиг. 4-9 будут даваться с учетом установки значений напряжения ограничения, указанных непрерывными линиями g и g на фиг. 3.
В якоре двигателя постоянного тока индуцируется магнитодвижущая сила EN, пропорциональная скорости двигателя N (фиг. 4).
Как изображено на фиг. 5, при ускорении -напряжение ограничения устанавливается равньлм 4v в области малых скоростей, например при скорости двигателя N1, и равным 7V при максимальной величине скорости двигателя, то есть при скорости N2. : Фазный угол зажигания тиристоров регулируется с учетом напряжения ошибки V таким образом, как показано на фиг. 6. Тиристор включается в момент, когда напряжение ошибки V совпадает с пилообразным напряжением VK, линейно меняющимся от своего максимального значения до нуля в диапазоне от +150°до -30° переменного напряжения VA источника энергии. Поэтому управление фазным углом зажигания тиристоров возможно в диапазоне от +150до -30°, но в случае работы на малой скорости из-за малости величины магнитодвижущей силы якоря максимальное значение фазного угла зажигания ограничивается ©М1 В этот момент к якорю подается только ток, указанный штриховкой в интервале работы диода 19 02. В изображенном на фиг. б случае меняемая ширина напряжения ошибки V выбирается в диапазоне от О до )(H., f и устанавливается такой, чтобы фазный угол зажигания мог достичь максимального значения 0fj , когда напряжение ошибки V равно )ц., . Поскольку магнитодвижущая сила якоря возрастает с увеличением скорости двигателя, соответствующим образом возрастает и напряжение ограничения.
Из фиг. 7 видно, что когда двигатель вращается с большой скоростью, магнитодвижущая сила якоря возрастает до Ец так, что диапазон управления фазным углом зажигания должен быть продлен далее в направлении К- +150 по сравнению ,с диапазоном управления в случае работы при малой скорости. В этом случае фиг. 7 величина напряжения ошибки V ограничивается у . чтобы не превышалось максимальное 0 значение фазного угла зажигания ®Ni результате этого фазный угол зажигания может регулироваться в диапазоне 03, и к двигателю может быть подан ток, указанный штриховкой, 5 в области D4.
Как говорилось выше, в случае, когда двигатель работает на малой скорости, верхний предел фазного угла зажигания может быть малым, а с увеличением скорости двигателя требуется больший фазный угол управления зажиганием. Если при работе на мёшой скорости напряжение ошибки аномально возрастает из-за плохой работы ограничителя тока или по аналогичной причине, зажигание тиристоров имеет место при большом фазном угле, в двигатель подается большой ток, приводящий к размагничиванию постоянных магнитов. Но если верхний предел фазного угла зажигания фиксируется в угловом-положении, наиболее подходящем для работы на малой скорости, диапазон управления фазным углом зажигания при работе на больших скоростях оказывается очень узким, и управление током оказывается невозможным.
В изобретенной системе при управлении ускорением напряжение ограничения или максимальный фазный угол устанавливается малым в диапазоне низких скоростей и большим в диапазоне больших скоростей.
. Обратимся к фиг. 8 и 9, с помощь которых будет описано управление торможением.
Как показано на фиг. 8 в случае управления торможением уровень ограничения устанавливается для постепенного возрастания от нуля, посколку скорость двигателя меняется от области больших скоростей до области малых скоростей. В изображенном на фиг. 8 примере, когда скорость двигателя равна N,, напряжение ограничения не превышает ,
В случае торможения двигателя, работакядего при большой скорости, полярность напряжения ошибки V инветируется, и фазное регулирование осуществляется на отрицательной полуволне источника энергий переменного тока. В этот момент полярность магнитодвижущей силы якоря ENT, меняется на противоположную от напряжения переменного тока VA так, что оказывается возможным достаточное протекание тока, даже если диапазон фазного угла зажигания относительно .уже. В соответствии с приведенными на фиг 8 и 9 примерами, когда скорость двигателя равна Nj,, напряжение ограничения устанавливается у VmoxNb верхний предел регулирования фазного угла зажигания устанавливается у QNJ, . Иначе говоря, управление фазным углом зажигания возможнЪ в диапазоне 1)5. Это делается для того, чтобы во время торможения двигателя, работавшего на большой . скорости, фазный угол зажигания не возрос аномально, что привело бы к протеканию по якорю чрезмерного тока
Устройство, изображенное на фиг., известно в основной своей части. Фазный угол зажигания тиристоров регулируется таким образом, что напряжение управления Vc и напряжение 5 обратной связи lio скорости а согласованы друг с другом, и двигатель управляется для получения требуемой скорости. Благодаря петле обратной связи по току, в состав
п которой входят датчик тока якоря и ограничитель тока, при управлении ток якоря не превышает предопределенной величины.
Однако в настоящем изобретении по вышеуказанным причинам диапазон
изменения напряжений ошибки регулируется блоком управления ускорением и блоком управления торможением, которые реагируют на сигнал датчика скорости двигателя.
0 Блок управления ускорением или разгоном двигателя 14 устанавливает уровень ограничения напряжения ошибки V в соответствии со скоростью двигателя, как указано сплоиной линией gi на фиг. 3, а схема управления торможением 15 устанавливает уровень ограничения напряжения ошибки V в соответствии со скоростью двигателя, как указано сплошной
0 линией 9 на фиг. 3.
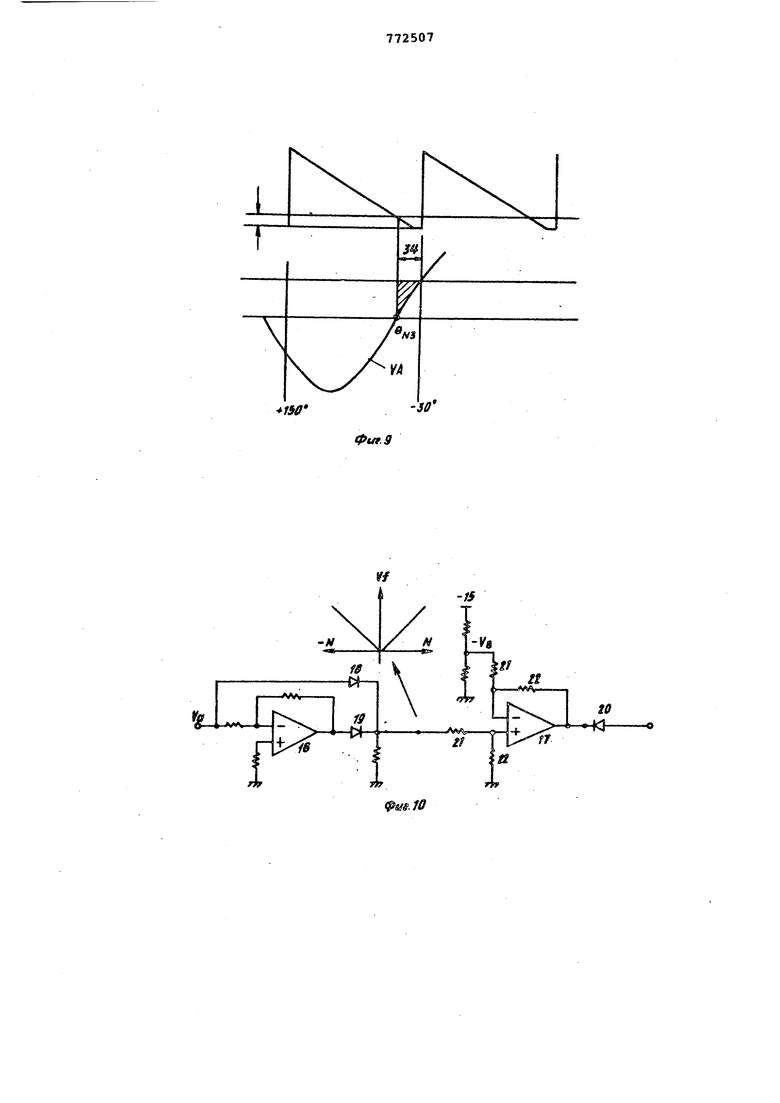
На фиг. 10 изображен пример схемы управления разгоном 14, которая содержит операционные усилители 16 и 17, диоды 18-20 и резисторы 21
и 22.
5
Первая половина этой схемы составляет схему выделения модуля, и когда на вход этой схемы подается входное напр5таение, то есть напряжение - Ча/ пропорциональное скорости двигателя, схема вырабатывает Vf , пропорциональное модулю скорости двигателя. Другая половина схемы образует схему сдвига уровня, которая сдвигает выходное напряжение при нулевой 5 скорости на величину, определенную фиксированным напряжением Vt и ре зисторами 21 и 22, то есть (VB)
Vll
к ч
Выходное напряжение равно ii
0 .
Выход блока управления разгоном 14 соединен со входом преобразователя 9 (фиг. 1), но так как по отношению к выходной клемме в обратном направлении подключается диод 20, выходное напряжение блока выделения модуля и ограничения 8 (фиг. 1), то есть напряжение ошибки V, ограничивается выходным напряжением ,ух управления ускорением 14.
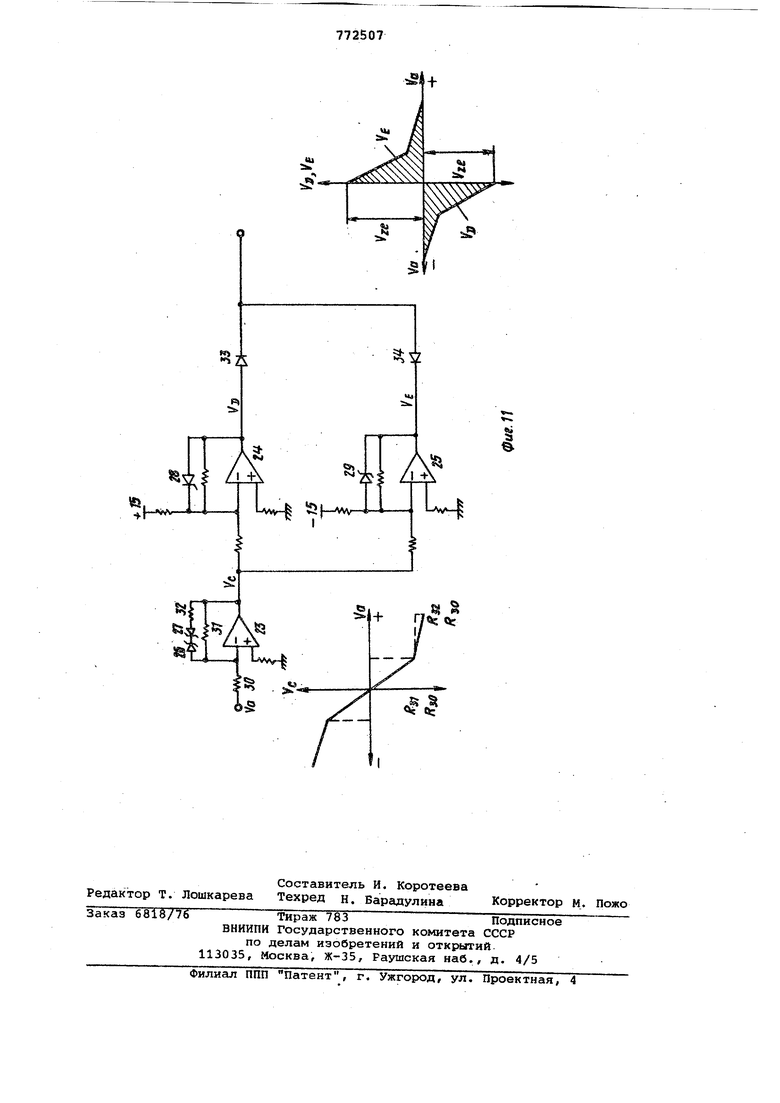
На фиг. 11 изображен пример схемы управления торможением 15. Позиции 23-25 указывают на операционные
5 усилители; позиции с 26 по 29 обоэначают диоды Зенера; позиции с 30 по 32 определяют резисторы, а диоды обозначены позициями 33 и 34.
На вход блока подается напряжение датчика скорости двигателя VQ. и выход блока подключается ко входу блока 8 (фиг. 1). Выходное напряжение операционного усилителя 23 меняется с наклоном Т,/К пропорционально входному напряжению Уд, когда это напряжение меньше, некоторой величины, и возрастает линейно, но более медленно с наклоном , когда выходное напряжение превышает эту величину. Напряжения с выходов операционных усилителей 24V и 35 меняется так, как показано на фиг.1 Когда V принимает отрицательные значения и двигатель постоянного тока приводится во вращение в пряiмом направлении,то есть в отрицательной области напряжения VQ , величина напряжения Vjj возрастае.т от нуля в отрицательном направлении, поскольку абсолютная величина напряжения VQ сдвигается от нуля в сторону его максимального значения, и напряжение Vj, становится отрицательным напряжением, что согласуется с зенеровским напряжением Vj,g , когда напряжение Уд достигает нуля.
Выходное напряжение Vg меняется в положительном направлении. Когда двигатель постоянного тока приводится во вращение в обратном направлении, то есть в положительной области напряжения Цз, напряжение меняется и достигает нулевого уровня, когда напряжение Х является максимальным, затем постепенно возрастает, достигая напряжения V , когда напряжение VQ равняется нулю.
Выходы усилителей 24 и 25 подключены к выходу через диод 33, включенный в прямом направлении, и диод 34, включенный в обратном направлении. Поэтому напряжение ошибки на выходе блока 7 (фиг. 1) становится отрицательным, когда напряжение управления уменьшается для торможения двигателя, вращающегося с большими оборотами в прямом направлении, но это напряжение ограничивается напряжением ограничения V и поэтому не может скачком достичь большого отрицательного уровня напряжения. Следовательно, оказывается возможны предупредить внезапное возрастание
фазного угла зажигания, которое может привести к токовой перегрузке.
Когда абсолютное значение напряжения управления уменьшается для торможения двигателя, вращающегося на большой скорости в обратном направлении, напряжение ошибки на выходе блока 7 становится положительным, но ограничивается напряжением Vg на выходе усилителя 25, поэтому
оказывается невозможным скачкообразное возрастание фазного угла зажигания для получения большого тока. Причиной того, что при торможении уровень ограничения делается нелинейным, является необходимость делать фазный угол малым при торможении высокоскоростного двигателя, но те же результаты могут бьоть получены, если уровень ограничения будет линейным.
Как уже говорилось ранее, в настоящем изобретении верхний предел напряжения ошибки или фазного угла зажигания ограничивается в соответствии с действительной скоростью
двигателя, поэтому оказывается возможным предупредить чрезмерное возрастание тока якоря, которое может привести к размагничиванию постоянных магнитов. А также, когда ограничитель тока не работает или оказывается слишком инерционным, токовой перегрузки можно избежать.
Формула изобретения
Способ регулирования скорости электродвигателя постоянного тока с постоянными магнитами путем изменения напряжения на якоре двигателя
в соответствии с ограниченной величиной напряжения ошибки, равной разности между напряжениями, пропорциональными заданной и действительной скорости, отличающ и и с я тем, что, с целью предохранения постоянных магнитов от размагничивания, уровень ограничения напряжения ошибки увеличивают при изменении действительной скорости
двигателя.
Источники информации, принятые во внимание при экспертизе
1. Лебедев Е. Д. и др. Управление вентильными электроприводами
постоянного тока. М., Энергия, 1970, с. 38.
jyf
3(
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1981 |
|
SU959248A1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Бесконтактный тяговый электропривод автономного транспортного средства | 1985 |
|
SU1425107A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |
| Сварочный выпрямитель | 1984 |
|
SU1171245A1 |
| Устройство для импульсного регулирования скорости тягового электродвигателя | 1980 |
|
SU887287A2 |
| Регулятор углов зажигания тиристоров | 1978 |
|
SU765978A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2311721C1 |
fNZ
li
Чюпмг.
I
N1N1
ffas.S
Vmoxf t
/
tNI
ч-
H-W
yff
Фи(.ё
фв/г7
-fof/3ФУ(.В
1S0
т
/
-IS
ш. 10
ЧА
4
