1
Изобретение относится к автоматическому регулированию и может быть использовано для автоматической стабилизации температуры движущихся поверхностей (лент, тканей, бумаги и 5 т.д.).
Известен регулятор температуры движущегося ленточного материала, содержащий источник горячего воздуха, связанный через запорный элемент с Ю туннельной печью, причем вход привода запорного элемента связан через регулирующий блок с выходом датчика температуры fl .
Однако из-за малой инерционности 5 канала управления(расход горячего воздуха - температура поверхности органического материала) значительно увеличивается амплитуда и частота колебаний температуры поверхности лен- 20 ты, что снижает точность регулятора. Увеличение частоты снижает также на- Дех ность исполнительного, органа (клапана воздуходувки).
Наиболее близким по технической 25 сущности к предлагаемому является регулятор температуры для протяженных движущихся объектов, содержащий последовательно связанные оптический .датчик температуры, измерительный 30
мост, усилитель мощности и щелевой нагреватель 2.
Недостатком регулятора является его низкая точность, обусловленная значительными отклонениями температуры в переходном режиме регулирования, так как щелевой нагреватель обладает значительной инерционностью.
Цель изобретения - повьшение точности регулятора тепературы для протяженных движущихся объектов.
Для достижения указанной цели регулятор температуры для движущихся протяженных объектов, содержащий последовательно связанные оптический датчик темлературы, измерительный мост, усилитель мощности и щелевой нагреватель, содержит последовательно соединенные функциональный преобразователь и привод, кинематически связанный со щелевым нагревателем, причем вход функционального преобразователя соёдйнёН со вторым выходом измерительного моста.
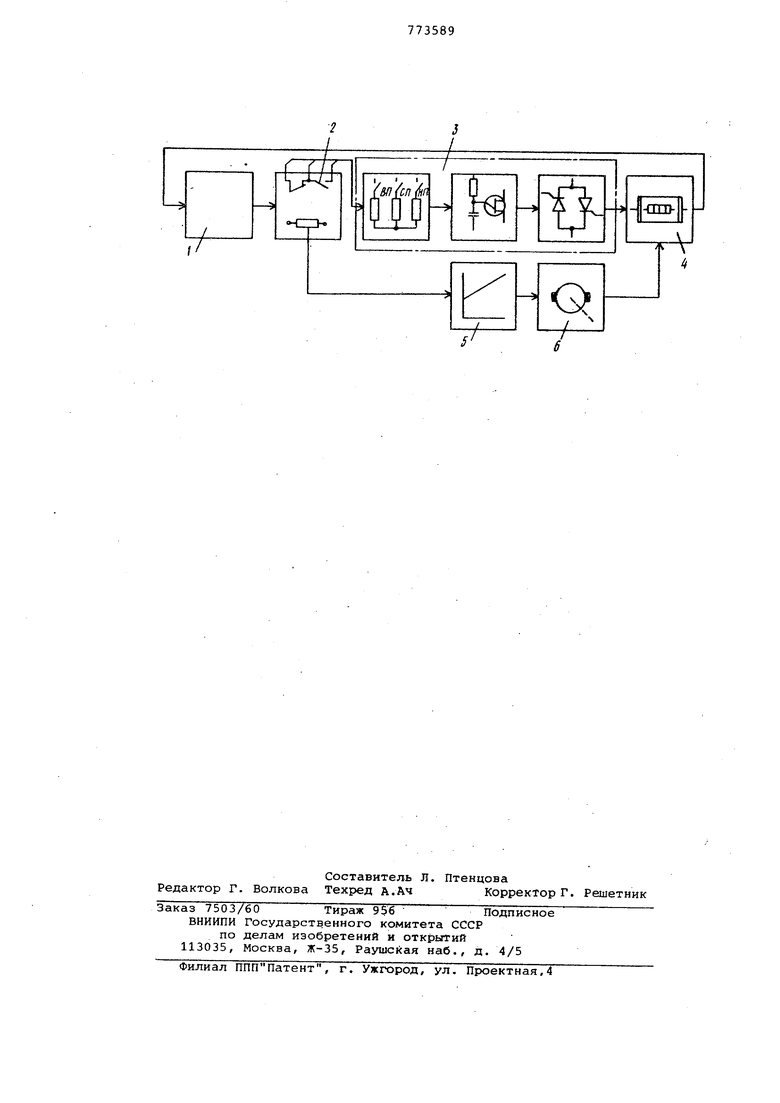
На чертеже изображена функциональная схема регулятора температуры для протяженных движущихся объектов.
Регулятор температуры для протяженных движущихся объектов содержит последовательно связанные оптический датчик 1 температуры, измерительный мост 2, усилитель 3 мощности и щелевой нагреватель 4, а также последова тельно соединенные функциональный преобразователь 5 и привод 6, Устройство работает следующим образом. В начале очередного цикла движения термообрабатываемого материала сигнал разбаланса со второго реостат ного выхода, измерительного моста 2 подается на вход функционального пре образователя 5, Усиленный и преобразованный сигнал с его выхода поступает на привод 6, который посредством кинематической связи со щелевым нагревателем 4 изменяет его положени относительно термообрабатываемого ма териала. Одновременно с этим с перво го(позиционного) выхода измерительно го моста 2 на щелевой нагреватель 4 подается максимальное напряжение. Пр этом происходит форсированный вывод температуры на номинальный уровень. После достижения температурой номинального уровня стабилизация последней осуществляется последовательным подключением к щелевому нагревателю 4 номинальных и пониженных напряжени т.е. в нормальном режиме работы системы стабилизации температуры движущегося материала осуществляется только изменением теплового состояни щелевого нагревателя 4 при неизменном положении последнего относительно термообрабатываемого материала. В случае возникновения возмущающего воздействия (изменение скорости движения материала).приводящего, например, к увеличению температуры дви жущегося материала, с выхода функционального преобразователя 5 поступает сигнал на привод 6. Последний изменяет положение щелевого нагревателя 4 относительно движущегося матери ала , так что уменьшается длина зоны термообработки. Одновременно с выхода усилителя 3 мощности к щелевому нагревателю подключается пониженное напряжение. Таким образом, компенсация возникшего отклонения регулируемой температуры вследствие действия возмущения осуществляется одновременно изменением теплового состояния щелевого нагрева теля 4 и положения последнего относительно термообрабатываемого матери ала. Поскольку инерционность канала содержсидего функциональный преобразователь 5 и привод б, относительно мала и определяется в основном толь ко быстродействием последнего, то дается формировать возвращение регулируемой температуры на номинальный уровень при отклонении ее вверх т номинального значения. Инерционность данного устройства по каналу (мощность, подаваемая на щелевой нагреватель 4, его температура)значительная и более чем на порядок превышает инерционность привода 6. Поэтому за время компенсации возмущения тепловое состояние щелевого наг ревателя 4 изменяется незначительно и это исключает при отработке возмущающего воздействия затягивание переходного процесса и увеличение амплитуды колебаний температуры материала в нормальном режиме. Аналогичным образом работает система при отклонении регулируемой температуры вниз от номинального значения(увеличение скорости движения материала). При использовании предложенной систекщл регулирования почти на 40% сокращается брак выпускаемой продукции за счет уменьшения количества материала, идущего на изготовление изделия с температурой ниже заданной в начале очередного цикла движения, а также за счет улучшения точности стабилизации температуры поверхности ленты в нормальном режиме работы системы.. Формула изобретения Регулятор температуры для протяженных движущихся объектов, содержащий последовательно связанные оптический датчик температуры, измерительный мост, усилитель мощности и щелевой нагреватель, отличающийся тем, что, с целью повьмения точности регулятора, он содержит последовательно соединенные функциональный преобразователь и привод, кинематически связанный со щелевым нагревателем, причем вход функциональрого преобразователя соединен со вторым выходом измерительного моста. Источники информации, принятые во внимание при экспертизе 1.Патент ОНА № 3552645, кл. 236-15, 1971. 2.Гузий В. Г., Толдин В. П. и др. Автоматическая стабилизация температуры движущихся материалов при их термообработке.-Сб. Элементы и технические средства управления и регулирования, Т. 324, Новочеркасск, 1976(прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ИСТОЧНИКА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2077705C1 |
| Устройство для температурной стабилизации подложек микросхем | 1976 |
|
SU705432A1 |
| Электронный терморегулятор на основе ферромагнитных микропроводов | 2024 |
|
RU2840821C1 |
| Регулятор температуры | 1983 |
|
SU1120300A2 |
| Трехпозиционный регулятор температуры движущихся материалов | 1978 |
|
SU723537A1 |
| Устройство для регулирования температуры | 1986 |
|
SU1383317A1 |
| Способ измерения концентрации газа термокаталитическим датчиком | 2019 |
|
RU2716877C1 |
| Регулятор | 1988 |
|
SU1695262A1 |
| ТЕРМОСТАТ ДЛЯ КАЛИБРОВКИ И ПРОВЕРКИ ОКЕАНОГРАФИЧЕСКИХ ПРИБОРОВ | 2012 |
|
RU2506624C2 |
| Устройство регулирования температуры | 1982 |
|
SU1061114A1 |