Наиболее близким по технической сущности и достигаемому при использо,вании результату к пpeдлaгaeмo гy является устройство, содержащее генератор тактовых импульсов, блок формирования управляющих сигналов, распределитель опроса парал1етров модели, выходы которого через элементы коммутации подключены к соответствующим входам блока физической модели, выходом соединенного с первым входом .блока контроля выходных параметров физической модели, блок памяти отказов по параметрам, блок сдвиговых регистров, выходы которого подключены соответственно ко входу блока ин дикации состояния сдвиговых регистров и входу распределителя опроса парс1Метров модели, блок счетчиков формирования допусковой области, блок регистров коррекции положения допусковой области и блок выдачи команд проверки работоспособности, выходы которых и выход генератора тактовых импульсов соединены с соответствующими входами блока сдвиговых регистров, первые входы блока формирования управляющих сигналдв и блока памяти отказов по параметрам подключены к выходу генератора тактовых импульсов а вторые входы - к выходу блока контроля выходных параметров физической модели, второй вход которого подключен к выходу генератора тактовых импульсов, входы блока, счетчиков фор жирования допусковой области и блока выдачи команд проверки работоспособности подключены соответственно к первому и второму выходам блока формирования управляющих сигналов, третий выход которого соединен с первыг-- входом блока регистров коррекции положения допусковой области, второй вход которого подключен к выходу блока, памяти отказов по параметрам/соединенному третьим входом с выходом блока вьадачи команд проверки работоспособности.
Данное устройство осуществляет регулярное формирование гиперкуба до.пусковой области, но в выпуклой области работоспособности. Регулярные же принципы используются для поиска начальной точки, проверки принадлежностц гиперкуба к области работоспособности и уточнения в ней местополо: сения оптимальной допусковой областц .г гиперкуба максимальных размеров. Поиск начальной, То е. первой работоспособной точки начинается при значениях внутренних параметров модели схемы, соответствующих верхним границам диапазонов варьирования, и осуществляется одновременным уменьшением этих значений на величину одн го кванта до прекращения отказов, С этого момента осуществляется формирование допусковой области. Гиперкуо формируется строго последователь1ным выращиванием (постепенным увеличением) диагонали на величину всегд одного кванта. Момент выхода гиперкуба из области работоспособности контролируется .появлением отказа хотя бы в одной из его вершин, для чего ос тдествляется их последовательная проверка при каждом увеличении размера диагонали, т. е. при каждом шаге. Изменение, (коррекция) место- положения гиперкуба в области pa6(ftoспособности для получения наибольшего размера его диагонали осуществляется с использованием информации об от.казовых вершинах изменением координат начальной точки. Доращивание диагонали гиперку.ба в новой точке . поз-воляет .избежать формирования заново допусковой области известных или меньших размеров.
В результате формирования гиперкуба максимальных размеров оптимальные по надежности долуски и номиналы параметров элементов устанавли- о Баются как координаты крайних и средних точек его диагонали, выращенной при фиксированном наборе параметров климатических воздействий С2,.
Недостатками устройства являются большой объем и большое время испытаний. Объем и время испытаний при формировании допусковых областей определяются числом обращений к физической модели схемы для контроля, на работоспособность анализируемых точек гиперкуба. Большие объемы и время испытаний при формировании допусковой области больших размеров обусловлены в устройстве постоянной. малой величиной шага по диагонали гиперкуба, разной всегда одному кванту, при выращивании диагонали и поиске первой работоспособной точки и предопределены составом элементов устройства и их взаимосвязью.
Цель изобретения - повышение быстродействия., . .
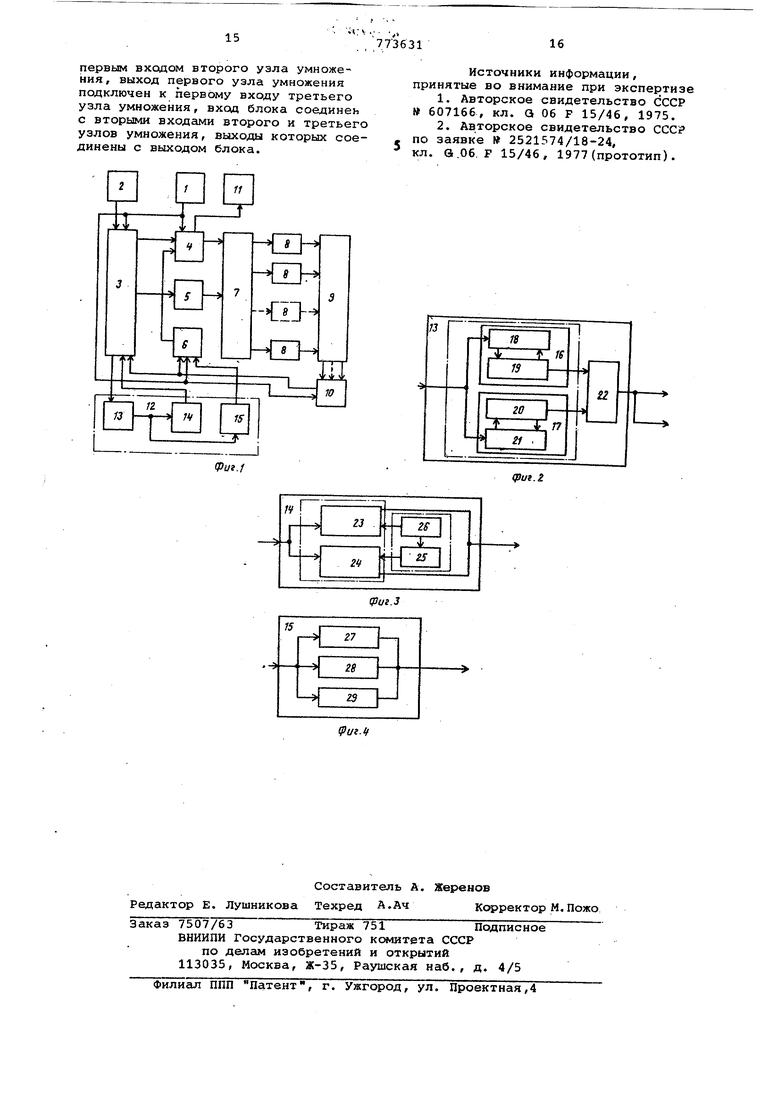
Поставленная цель достигается тем что в устройство для определения оптимальных допусков и номиналов параметров электрорадиоэлементов, содежащее распределитель опроса параметров , выходы которого через соответствующие элементы коммутации подключены к входам блока моделирования значений параметров, выходы которого соединены соответственно с входами блока контроля, блок установки программы контроля, выход которого соединен с первым входом блока дешифрации команд, генератор тактовых импульсов , выход которого соединен с синхронизирутадими входами блока контроля, блок дешифрации команд, блок памяти отказов по параметрам и блок регистров положения допусковой области, первый вход которого соединен с первым выходом блока дешифрации команд, э первый и второй выходы подключены соответственно к входу блока индикации результатов и к первому входу распределителя опроса параметров , второй вход KOTot oro через блок вьщачи сигнала проверки работоспособ ности соединен со вторым выходом блока дешифрации команд, второй вход которого и первый вход блока памяти отказов по параметрам соединены с выходом блока контроля, выход блока памяти отказов по параметрам подключ ко второму входу блока регистров пол жения допусковой области, введены блок вычисления интервалов неопределенности, блок вычисления величины ш га и блок.сравнения, выход которого подключен ко второму входу блока памяти отказов по параметрам, выход блока вычисления интервалов неопределенности соединен с входами блока сравнения и блока вычисления величины шага, выход которого подключен к третьему входу блока дешифрации команд, третий выход которого соединен с входом блока вычисления интервалов неопределенности, Кроме того, в устройстве блок вычисления интервалов неопределенности .содержит узел управляемых регистров и две схемы сравнения, входы которы являются входами, блока,а выходы сое динены соответственно с входами узл управляемых регистров, выход которо го является выходом блока, а блок вычисления величины шага содержит тр узла умножения и узел памяти, выходы которого соединены соответственно с вкодсял первого узла умножения и с первым входом второго узла умножения, выход первого узла умножения подключен к первому входу третьего узла умножения, вход блока соединен со вторыми входами второго и третье го узлов умножения, выходы которых соединены с выходом блока. На фиг. 1 изображена схема устрой ства; на фиг. 2 - схема блока вычис ления интервалов неопределенности} на фиг. 3 - схема блока вычисления величины шага; на фиг. 4 - схема блока сравнения. Схема устройства содержит генератор 1 тактовых импульсов, блок 2 установки программы контроля, блок дешифрации команд, блок 4 регистров положения допусковой области, блок 5 вьадачи сигнала проверки работоспособности, блок б памяти отказов парс1метрам, распределитель 7 опроса параметров, элементы 8 коммутации, блок 9 мрделирования значения параметров, блок 10 контроля, блок 11 индикации результатов , оптимизатор 12 испытаний, включающий блок 13 вычисления интервалов неопределенности, блок 14 вычисления величины шага, блок 15 сравнения, схема 16 сравнения, включающая регистры 18,19,, схема сравнения, включающая регистры 20,21, узел 22 убавляемых регистров, узлы 23-25 умножения, узел 26 памяти схемы 27-29 сравнения. Устройство работает следующим образом. Поиск оптимальной допусковой области осуществляется в два этапа. На первом из работоспособной начальной точки многомерного пространства области исследования формируется исходная допусковая область в виде гиперкуба. Координаты начальной точки определяются по результатам предварительной детерминированной оптимизации { электрического расчета) и около нее велика вероятность нахождения допусковой области больших размеров. Формирование исходной допусковой области осуществляется выращиванием диагонали гиперкуба с переменным шагом сначала в сторону увеличения значений параметров, а затем по достижении границ выпуклой области работоспособности в сторону уменьшения. Достижение границ контролируется регулярной проверкой вершин гиперкуба на каждсял шаге. Второй этап - коррекция исходной допусковой области - начинается по завершении первого и устанавливает координаты оптимальной допусковой области гиперкуба максимальных размеров. Работа устройства начинается с анализа работоспособности начашьной точки, координаты которой введены в блок 3 определяющий последовательность выполнения операций блоков устройства и осуществляющий переход устройства от формирования исходной допусковой области к ее коррекции подключением различных исполнительных блоков. Сигналы с генератора 1 тактовых импульсов, синхронизируквдего работу всего устройства, поступают на входы блока 3, блока 4 рёгист ов положения допусковой области, блока 6 памяти отказов по пареилетрам и блока 10 контроля. По командам блока 3 блок 4 регистров положения допуско- вой области через распределитель 7 с псмлсядью элементов 8 коммутации устанавливает в блоке 9 моделирования значения представителей квантов параметров , соответствующие координатам начальной точки, а блок 10 контроля анализирует ее работоспособность. Если.точка работоспособна по заранее установленнся 1у критерию, то в блоке 4 запс линаются ее координаты и по команде блока 3 реализуется формирование исходной допусковой области с использованием оптимизатора 12 испытаний. , Формирование исходной допусковой области начинается с расчета блоком 13 вычисления интервалов неопределенности первого верхнего интервала неопределенности, протяженности област исследования от начальной точки: вверх до ее границы в направлении, совпадающем или параллельном с ее X главной диагональю, которая начинает ся в вершине области с малыми значениями всех параметров элементов модели и заканчивается в вершине с их большими значениями. Расчет осуще ствляется по исходным данным, постуПёисйцим с выхода координатной информации блока 3. Сначала сравниваются между собой номера представителей квантов параметров в начальной точке и выбирается наибольший, а затем вычисляется верхний интервал неопределенности как разность номеров послед него (известного) кванта главной д агонсши области исследования и выб рд нного. в верхнем интервале неопределенно ти имеется верхняя граница исходной допусковой области, определяемая координатами конечной точки ее диагонал Поиск осуществляется постепенным сокраадением интервала неопределенности до одного кванта. Для этого поочеред но проверяются на работоспособность точки, отстоящие от начальной на расстояния i и л.. Значения д и k2 выбираются блоком 14 вычисления величины шага по методу золотого сечения, который обеспечивает скорей ший поиск граничной точки, произволь ньм образом расположенной на заданно интервале неопределенности . - . д. где tr - ( -TS-D/Z -0,618 безразмерная величина, определяющая сущность метода; Ц- протяженность интервал неопределенности,вырешенная в количестве квантов. Для первого верхнего интервала Л,Да принимают только целые зна -чения. Информация о значениях шагов поступает на вход установки величины шага блока 3. По его команде делается первый диагональный шаг одновременнь1м увеличением значений всех парамергров модели из начальной точки н вели%и«у Д-|. Новая точка анализирует ся ф1оксФ4 10 контроля. Если она работоспособна, то блок 3 вьадает команду на реализацию процедуры формирования и проверки других вершин гиперкуба в соответствии с требованиями блока 2 установки программы контроля. Формирование и проверка осуществляется строго последовательным обратным смещением на &. отJдельного параметра и пары параметров при условии, -что все остальные фиксируются в последней из выявленных диагональных точек. Команды блока 3 на изменение координат контролируемых вершин гиперкуба отрабатывает блок 4 регистров положения допусковой области, по сигналам которого распределитель 7 включает через элементы 8 коммутации необходимые представители квантов параметров в блоке 9 моделирования. Проверку каждой вершины осуществляет блок 10 контроля по сигналам 3 вьщачи сигнала проверки работоспособности. Второй диагональный шаг ug делается из начальной точки, если на первом шаге все вершины выращиваемого гиперкуба оказались работоспособными.. Значение А 2 рассчитывает блок 14вычисления величины шага по командам блока 3 и данным блока 13 вычисления интервалов неопределенности. В блоке 9 моделирования устанавливаются координаты новой и повторяется цикл проверки работоспособности диагональной точки и вершин гиперкуба в соответствии с программой контроля. Вычисляется новый, второй, интервал неопределенности, который при всех работоспособных предьадущих , вершинах находится выше диагональной точки, полученной на втором шаге Ад и -} /t; меньше первого. Процедуры вычисления всех интервалов неопределенности подобны. Но втором интервале повторяются шаги, рассчитываемые для него блоком 14 вычисления величины шага, подобно Д и л из последней работоспособной диагональной точки. После каждого шага повторяется проверка вершин выращиваемого гиперкуба. Положение его верхней границы уточняется сок.ращением интервала неопределенности в l/tT раза. Появление отказа в диагональной точке локализует положение границы допусковой области между ней и предьгдущей диа1-ональной точкой. Новый . интервал неопределенности вычисляется меяаду ними, последовательность его анализа не меняется. Появление отказа хотя бы в одной из вершин исходного гиперкуба при поиске его верхней границы означает нарушение работоспособности соответствующей ей диагональной точки. Прекращается проверка вершин, вычисляется новый интервал неопределенности, в котором повторяются шаги, подобные -f и Д, Поиск верхней границы исходной допусковой области прекращается, когда . протяженность конечного верхнего интервала неопределенности станет равной единице. Это устанавливает блок 15сравнения. По его сигналу блок 4 регистров положения допусковой области запоминает координаты (номера пр.едставителей квантов) верхней гра ничной точки на диагонали формируемо го гиперкуба и осуществляет возврат поиска в начальную течку. Нижняя граница исходной допусково области ищется в нижнем интервале неопределенности - протяженности области Исследования от начальной точки до ее границы в сторону уменьшения параметров. Размер интервала неопределенности по командам блока 3 устанавливает блок 13 вычисления ин.тервалов неопределенности и численно равен наименьшему из номеров предста вителей кв.антов параметров начальной точки. Процедура вычисления и реализ ции шагов, контроля вершин сохраняет ся. Меняется знак шагов, так как значения варьируемых параметров уменьшаются. Текущее значение протяженности нижнего интервала неопределенности контролирует по данным блока 13 вычисления интервалов неопределенности блок 15 сравнения. Подготовка к коррекции исходной допусковой области начинается тогда когда протяженность нижнего интервала неопределенности становится равной трем или двум квантам. По сигналу блока 15 сравнения включается в работу блок 6 памяти отказов по параметрам. Он по данным блока 10 контроля запоминает координаты вершин (номер одного или пары параметро по которым произошел отказ. Делаются следующие два или один шаг, нербходи1увие для уточнения до одного кванта границы области. При появлени отказбв на этих шагах информация в блоке 6 памяти отказов по параметрам об отказовых вершинах обновляется запоминаются координаты вершин, проверенных на последнем шаге. Формирование исходной допусковой области заканчивается, когда значение нижнего интервала неопределенности становится равным единице. В итоге формирования блок 4 регистров положения допусковой области запоминает координаты крайних (нижней и верхней) граничных точек диагонали выращиваемого гиперкуба, а блок 6 памяти отказов по парё1метрам - координаты вершин (вершины), ограничивающих его дальнейший рост. Крррекция исходной допусковой области включается по сигналам блоков 15 и реализуется блоком 4 регистров положения допусковой области по данным блока 6 памяти отказов по парсциетрам. Оптимизатор 12 испытани при коррекции не используется. В со ответствии с информацией об отказавших параметрах в блоке 4 производится изменение координат верхней граничной точки. Каждый отказавший парс1метр получает смещение (реверс) на один шаг в противоположную сторо ну. Проверяется работоспособность новой верхней точки и, если она работоспособна, осуществляется доращивание допусковой области. Для этого аналогично изменяются координаты нижней граничной точки. После проверки работоспособности начинается увеличение диагонали исходной допусковой области теперь всегда на один квант, так как резкого увеличения гиперкуба ожидать трудно. Если первый шаг оказался работоспособным, то блок 4 регистров положения допусковой области осуществляет следующий шаг по всем параметрам, а блок 5 - вьвдачу сигналов на проверку зтого шага. Доращивание продолжается до появления отказа хотя бы в одной из вершин, информация о которой фиксируется в блоке 6 памяти отказов по параметрам. Блоком 4 регистров положения допусковой области осуществляется следующая коррекция выращиваемого гиперкуба. Исследование заканчивается, если после коррекции очередной шаг оказывается отказовым. Гиперкуб допусковой области, найденный на предьщущем шаге и координаты которого зафиксированы блоком 4, считается оптимальным, т. е. наибольшим по объему. Результаты поиска оптимальной допусковой области индицирует блок 11 индикации результатов в виде номеров квантов параметров (координат) крайних точек диагонали наибольшего гиперкуба. Это позволяет в численном виде рассчитать допуск на каждый верьируемый параметр исследуемого функционального узла как разность между координатами крайних точек и установить координаты середины диагонали оптимальной допусковой области. Они принимаются за оптимальные по надежности допуски и номиналы параMetpoB элементов функционального узла при фиксированных значениях параметров эксплуатационных факторов. Если в начале работы устройства 10 контроля устанавливает неработоспособность начальной точки,то блок 3 выдает команду на предварительный поиск работоспособной точки оптимизатором 12 испьианий. Блок 13 вычисления интервалов неопределенности поочередно рассчитывает верхний и нижний интервалы неопределенности относительно начальной точки. В каждом из них поочередно рассчитываютря, реализуются и контролируются диагональные шаги подобно Д-t и л Блок 6 отказов памяти по параметрам запоминает координаты отказавших диагональных точек, которые используются до расчета других меньших по размерам интервалов неопределенности , причем в первую очередь анализируются ближайшие к начальной .точке интервалы. Определение блоком 10 контроля хотя бы одной работопособной .ситуации в блоке 9 моделироания служит командой на прекращение непроизводительного двухстороннего анализа и перехода к формированию исходной допусковой области, локализуя поиск около этой точки и ближайших к ней неработоспособных.В остальном порядок функционирования блоков анаогичен порядку при поиске верхней границы исходного гиперкуба.
Блок 4 регистров положения допусковой области содержит группы трех сдвиговых регистров на каждый варьируемый параметр. Первый регистр характеризует координату нижней точки на диагонали допусковой области, второй - верхней точки, третий используется для задания текущих значений координат обеих точек. Для установки координат начальной точки по разрешакадей команде блока 3 одновременно на три регистра всех групп от генератора 1 тактовых импульсов подаются сигнаипы, число которых равно номеру кванта (координате начальной точки) соответствующего параметра. При поиске оптимальной допусковой области регистры работают парами: второй и третий - при поискЪ верхней гранища} первый и третий - при нижней. Диагонгшьные шаги решаются сначала с помощью третьего регистра подачей на него от генератора 1 тактовых импульсов числа сигналов, равного величина шага.С его же помощью формируются другие вершины гиперкуба. И только после проверки их работоспособности информация о последней диагональной точке переписывается во второй или первый, регистр. При коррекции исходной допусковой области необходимые изменения также осуществляются в третьих регистрах и только при , возможности продолжения коррекции в других. Блок 4 регистров положения допусковсй области управляет распределителем 7 и элементами 8 кс утации. Управление заключается в.тсал, что в соотвехствин с режимами работы устройства, к выходам третьих регистров из каждой группы подключаются через распределитель 7 и элетленты 8 коммутации соответствующие представители квантов варьируе в:1х параметров физической модели. Распределитель 7 ,обесцвечивает включение необхсздимых элементов -8 ког-&«утации.
$лрк 9 моделирования содержит диэлектрическую плату (или подложку) на которой последовательно с контактами соответствующих элементов 8 коммутации подключены элементы, обеспечивёиощие выдачу значений представителей квантов варьируемых параметров исследуемого функционального узла, с диапазонами, обеспечивающими определение границ области работоспособности и разбитые на одинаковые
в относительных единицах интервалы кванты.Блок 10 контроля содержит набор цифровых измерительных приборов, анализирующих выходные сигналы блока 9 моделирования и характеризующих указанную блоком 5 ситуацию, определяя работоспособна она или нет в соответствии с выработанными критериями работоспособности. На время контроля, кратное периоду поступления сигналов от генератора 1 тактевых импульсов, все переключения в блоке 9 моделирования прекращаются. Сигнал об отказовой ситуации поступает в блок 3 и блок б памяти отказов по параметрам. В блоке 6 памяти отказов по параметрам дополнительно записывается информация о составе проверяемой ситуации.
Блок 11 индикации результатов содержит табло с индикаторными лампочкс1ми разрядов первых двух ре истров каждой группы блока 4 регистров положения допусковой области и позноляет визуально наблюдать работу устройства по формированию оптимальной допусковой области. Разница показаний индикаторов каждой пары регистров позволяет получить допуски на параметры варьируемых элементов. В блоке 13 вычисления интервалов неопределенности схема 16 выполнена в регистров 18 сравнения двух чисел, последовательно поступгшзщих на ИХ вход, и регистров 19 памяти числа, выбранного регистрами 18. Регистры 18 и 19 взаимодействуют один о другим. Схема 17 аналогична по составу и функциональным связям схеме 16. Узел 22 управляемых ре- . гистров является вычислительной схемой и состоит из трех управляемых регистров с непосредственными связями и возбуждением цепей вычитания. Первый регистр узла используется для приема информации от схемы 16 или схемы 17 и выдачи информации в блок 14 и блок 15, второй регистр, псшимо приема и выдачи инфО Я4ации в третий регистр, решает операции сдвига, третий регистр выполняет задачи второго регистра и функции сумматора накапливающего типа с возбуждением цепей только вычитания. Схема 16 сравнения (номеров квантов) предназначена для определения крайних значений номеров квантов - координат точки, поступающих от блока 3. Схема 16 определяет наибольшее значение номера кванта, схема 17 наименьшее. Эта информация используется для расчета разности номеров известных и последсэвательно поступающих от схемы 16 ;и схемы 17 для. определения соответственно верхних или нижних интервалов неопределенности. В блоке 14 вычисления величины шага узел 26 состоит из регистров постоянной памяти значения С и узла 25 расчета значения Т .Узел 25 ,предназначенный для расчета зна,чений держит три управляемых регистра с непосредственными связями. Первый регистр (регистр множимого) используется для временного хранения значения получаемого из узла 26 памяти, второй регистр (регистр множителя) используется для тех же целей, трети регистр(регистр накопления частичных произведений) - для получения произ ведения чисел, записанных в двух пер вых регистрах. Умножение производится с точностью до третьего знака по методу, начиная с младших разрядов множителя. Узел 24 предназначен для расчета значения д а узел 23 - для расчета значения д.элы 25 и 24-по составу и функциональным связям ана;логичны узлу 25. Отличие состоит в том, что входы .вторых эегистров(регистров множителей) подключены к выходу блока 13 вычисления интервало неопределенности. Значения шагов-А или Ла с выходов третьих регистров узлов 23 и 24 поступают на вход блок 3 установки величины шага координат контролируемых . на работоспособность точек. Блок 15 содержит три схемы сравнения 27,28 и 29. Каждая из схем сравнения состоит из регистров посто янной памяти заданного числа, регист ров сравнения двух чисел. Заданными числами в схеме 27 сравнения является единица, в схеме 28 сравнения - дв в схеме 29 сравнения.- три. Вход регистров сравнения каждой схемы сравнения подключен к выходу блока 13 вычисления интервалов неопределен ности, вторые входы.регистров сравне ния соединены с выходами соответствующих регистров постоянной памяти. Схемы сравнения используются для выработки импульса, появляющегося на выходе одной из схем при совпадении числа, поступающего от блока 13, с заданным. Сигнал от схемы 27 сравнения является командой окончания поиска верхней или нижней границы исхо ной допусковой области и перехода к ее коррекции. Сигналы противоположно полярности от схемы 28 сравнения и схемы 29 сравнения служат для подготовки к работе блока 6 в режиме коррекции, в которой оптимизатор 12 испытаний не участвует. Устройство позволяет сократить объем и время испытаний за счет использования переменного шага, значения которого при выращивании диагонали формируемой допусковой области и поиска.первой работоспособной точк определяются по методу золотого сече ния , обеспечивающего скорейший поиск произвольным образом размещенннлх необходимых точек исходного гиперкуба в заданном интервале. Формулаизобретения 1.Устройство для определения оптимальных, допусков и номиналов параметров электрорадиоэлементов, содержащее распределитель опроса параметров, выходы которого через соответствующие элементы коммутации подключены к входам блока моделирования значений параметров, выходы которого соединены соответственно с входами блока контроля, блок установки программы контроля,выход которого соединен с первым входом блока дешифрации , команд, генератор тактовых импульсов, выход которого соединен с синхронизирующими входами блока контроля, блока дешифрации команд,.блока памяти отказов по параметрам и блока регистров положения допусковой области , первый вход которого соединен с первым выходом блока детцифрацин команд, а первый и второй выходы подключены соответственно к .входу блока индикации результатов и к первому входу распределителя опроса параметров, второй вход которого через блок выдачи сигнала проверки работоспособности соединен с вторым выходом блока дешифрации команд, второй вход которого и первый вход блока памяти отказов по параметрам соединены с выходом блока контроля, выход блока памяти отказов по параметрам подключен к второму входу блока регистров положения допусковой области, отличающеес я тем,.что., с целью повыаения быстродействия, в него введены блоки вычисления интервалов неопределенности, вычисления величины шага и . блок сравнения, выход которого подключен ко второму входу блока памяти отказов по параметрам, выход блока вычисления интервалов неопределенности соединен с входами блока сравневия и блока вычисления величины шага, выход которого подключен к третьему входу блока дешифрации команд , третий выход которого соединен с входом блока вычисления интервалов неопределенности.. 2.Устройство по п. 1, о т л и- чаю.адееся тем, что блок вычисления интервалов неопределенности содержит узел управляемых регистров и две схемы сравнения, входы которых являются входами блока, а выходы соединены соответственно с входа- , ми узла управляемых регистров, выход которого является выходом блока. 3.Устройство по п. 1, отличающееся тем, что блок вычисления величины шага содержит три узла умножения и узел памяти, выходы которого соединены соответственно с входе первого узла умножения и с
первым входом второго узла умножения, выход первого узла умножения подключен к первому входу третьего узла умножения, вход блока соединен с вторыми входами второго и третьего узлов умножения, выходы которых соединены с выходом блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 607166, кл. Q 06 F 15/46, 1975.
2.Авторское свидетельство СССР по заявке 2521574/18-24,
кл. G.06. F 15/46, 1977 (прототип).



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения оптимальных номиналов и допусков параметров элементов радиоэлектронных схем | 1977 |
|
SU717783A1 |
| Устройство для определения оптимальныхНОМиНАлОВ и дОпуСКОВ пАРАМЕТРОВэлЕМЕНТОВ РАдиОэлЕКТРОННыХ CXEM | 1978 |
|
SU809208A2 |
| Устройство для проведения матричных испытаний статистическим способом | 1976 |
|
SU607166A1 |
| Устройство для автоматического оп-РЕдЕлЕНия дОпуСКОВ пАРАМЕТРОВэлЕМЕНТОВ РАдиОэлЕКТРОННыХ CXEM | 1979 |
|
SU815684A1 |
| Устройство для проведения матричныхиСпыТАНий МиКРОэлЕКТРОННыХ CXEM | 1979 |
|
SU851414A1 |
| ВИРТУАЛЬНАЯ ПОТОКОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА, ОСНОВАННАЯ НА ИНФОРМАЦИОННОЙ МОДЕЛИ ИСКУССТВЕННОЙ НЕЙРОСЕТИ И НЕЙРОНА | 2012 |
|
RU2530270C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЭЛЕКТРОННЫХ СХЕМ | 1997 |
|
RU2137148C1 |
| Устройство для определения границы области работоспособности технических объектов | 1988 |
|
SU1539730A1 |
| Устройство для проведения матричных испытаний радиоэлектронных схем | 1978 |
|
SU765813A1 |
| Архитектура для интеллектуальных вычислительных и информационно-измерительных систем с нечеткой средой вычислений | 2018 |
|
RU2680201C1 |
