(54) СПОСОБ ПРЕОБРАЗОВАНИЯ ЧАСТОТЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный преобразователь час-ТОТы C НЕпОСРЕдСТВЕННОй СВязью | 1976 |
|
SU803088A1 |
| Однофазный машинно-вентильный генератор | 1977 |
|
SU736282A1 |
| Магнито-полупроводниковый преобразователь частоты | 1976 |
|
SU736295A1 |
| ГИБРИДНЫЙ КОМПЕНСАТОР ПАССИВНОЙ МОЩНОСТИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2001 |
|
RU2187872C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| МАГНИТНО-ПОЛУПРОВОДНИКОВЫЙ УТРОИТЕЛЬ ЧАСТОТЫ | 2013 |
|
RU2540403C2 |
| Инвертор со ступенчатой формой выходного напряжения | 1972 |
|
SU699627A1 |
| ПРЕОБРАЗОВАТЕЛЬ МОТОВИЛОВА | 1989 |
|
RU2016483C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2085017C1 |
| Однофазный удвоитель частоты | 1975 |
|
SU603071A1 |
1
Изобретение относится к преобразовательной технике, а именно к разделу магнитно-полупроводниковых устройств и может использоваться в электротехнических преобразовательных установках и в системах электропривода.
Известен способ преобразования частоты путем циклической (поочередной) коммутации, позволяющий регулировать частоту как в сторону повышения, так и в сторону понижения относительно частоты питания, а также обеспечивает свободный обмен реактивной мощностью между питающей сетью и нагрузкой 1, 2, 3| и 4.
Так как частота и последовательность переключений с одной фазы питания на другую определяется разностью между требуемой частотой и частотой питания, то для преобразования частоты данным способом требуется сравнение напряжения требуемой частоты с напряжением питания, вырабатывание на основании этого сравнения последовательности сигналов, управляющих элементами коммутации, обеспечение выключения (запирания) каждого предыдущего коммутирующего элемента при включении последующего.
Все это обуславливает сложность реализации данного способа, что является его недостатком.
Кроме того, данный способ приводит к усложнению аппаратуры и сравнительно низкому ее использованию, так как каждый ключ используется только во время подключения нагрузки к одной фазе и не используется остальное время.
Указанные недостатки частично устранены при реализации способа поочередной ком.мутации с помощью магнитно-полупроводниковых элементов, в которых полупроводниковый ключ замыкает накоротко обмотку или часть обмотки трансформатора. Использование таких элементов в преобразователе, позволило получить двухканальную систему управления 5.
Однако этот преобразователь все же имеет сложную силовую схему и обеспечивает на вы.ходе только прямоугольное напряжение.
Наиболее близким к предлагаемому является способ циклической ком.мутации с помощью нелинейных реактивных элементов с одним устойчивым состоянием. Каждый такой элемент представ,тяет собой дроссель (управляемый трансформатор), у которого
одна обмотка замкнута накоротко управляемым вентилем. При подаче напряжений питания на первичные обмотки дросселей так, что напряжения их вторичных обмоток образуют симметричную многофазную систему и при отпирании половины вентилей, половина дросселей приводится к своему устойчивому состоянию насыщения, что приводит к нарушению симметрии и появлению выходного напряжения синусоидальной формы 6.
Способ циклической коммутации с использованием реактивных элементов с одним устойчивым состоянием обеспечивает упрощение силовой схемы; лучщее использование ее элементов и улучщение формы кривой выходного напряжения.
Однако использование указанных элементов не устраняет основного недостатка способа - его сложности (необходимости сравнения частоты питания с требуемой частотой и выработки определенной последовательности управляющих сигналов), а также дискретности процесса преобразования частоты.
Цель изобретения - упрощение реализации способа преобразования частоты и фазы.
Эта цель достигается тем, что при подаче симметричного многофазного напряжения на нелинейные реактивные элементы, имеющие одно устойчивое состояние при отсутствии управляющего сигнала, управление этими элементами осуществляют с частотой выходного напряжения и синфазно во всех элементах.
Так как изменение устойчивого состояния каждого нелинейного элемента, например изменение индукции в нелинейной индуктивности или изменение заряда в нелинейной емкости, происходит только при совпадении во времени управляющего воздействия и определенной полярности приложенного напряжения, а при указанном управлении такое совпадение имеет место лищь для части элементов, то различные элементы оказываются в различных условиях и симметрия системы нарушается. При этом к нагрузке прикладывается сумма напряжений определенных фаз питания, причем выбор этих фаз и задание фазы выходного напряжения осуществляется автоматически заданием моментов подачи управляющего сигнала и длительностью этого сигнала. В результате этого процесс преобразования происходит плавно и регулируется лишь одним управляющим сигналом, чем достигается цель изобретения. Управление нелинейными элементами осуществляется замыканием их цепей управления через неуправляемые вентили на время, равное приблизительно половине периода выходной частоты.
Управление осуществляют с помощью управляемых вентилей подачей на все их управляющие электроды одного сигнала, длительность которого равна четверти деоиода выходной частоты, с точностью до , где m - число упомянутых элементов.
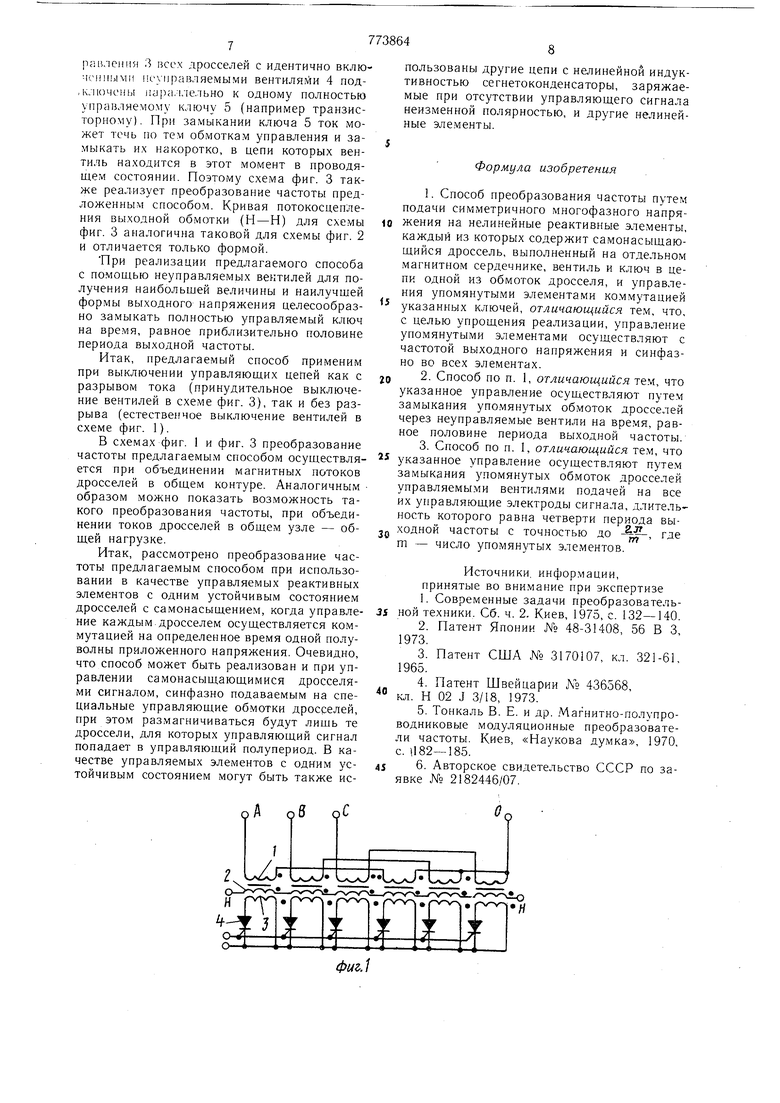
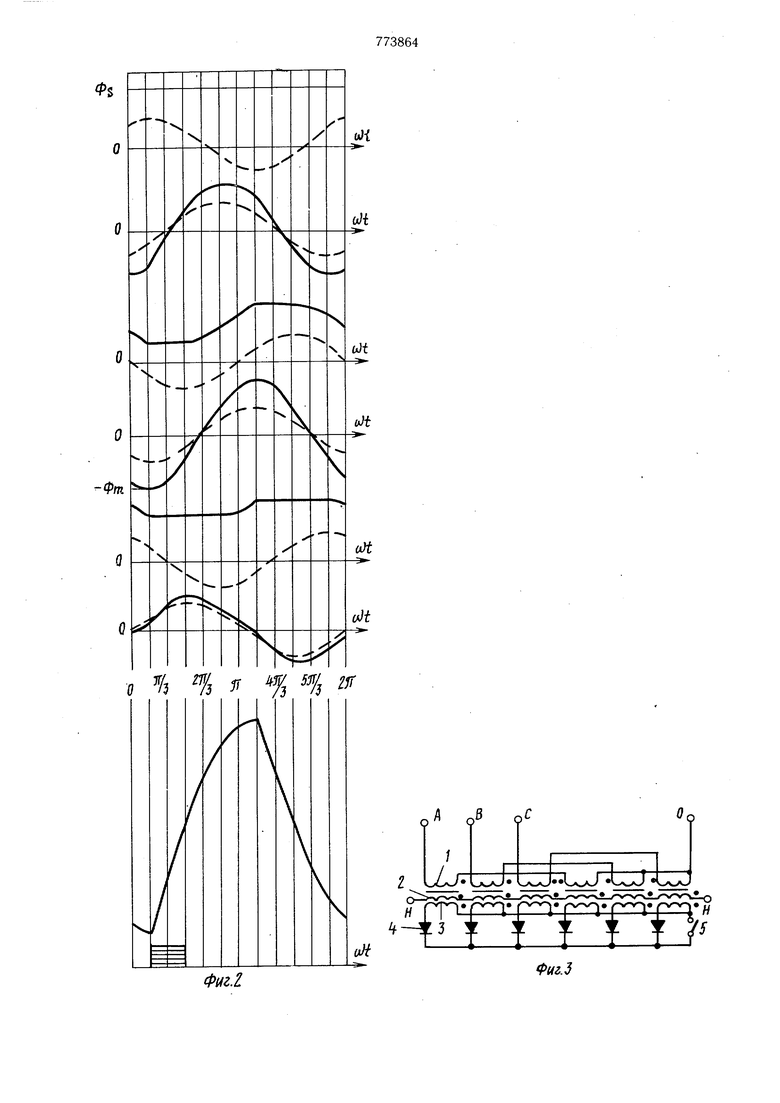
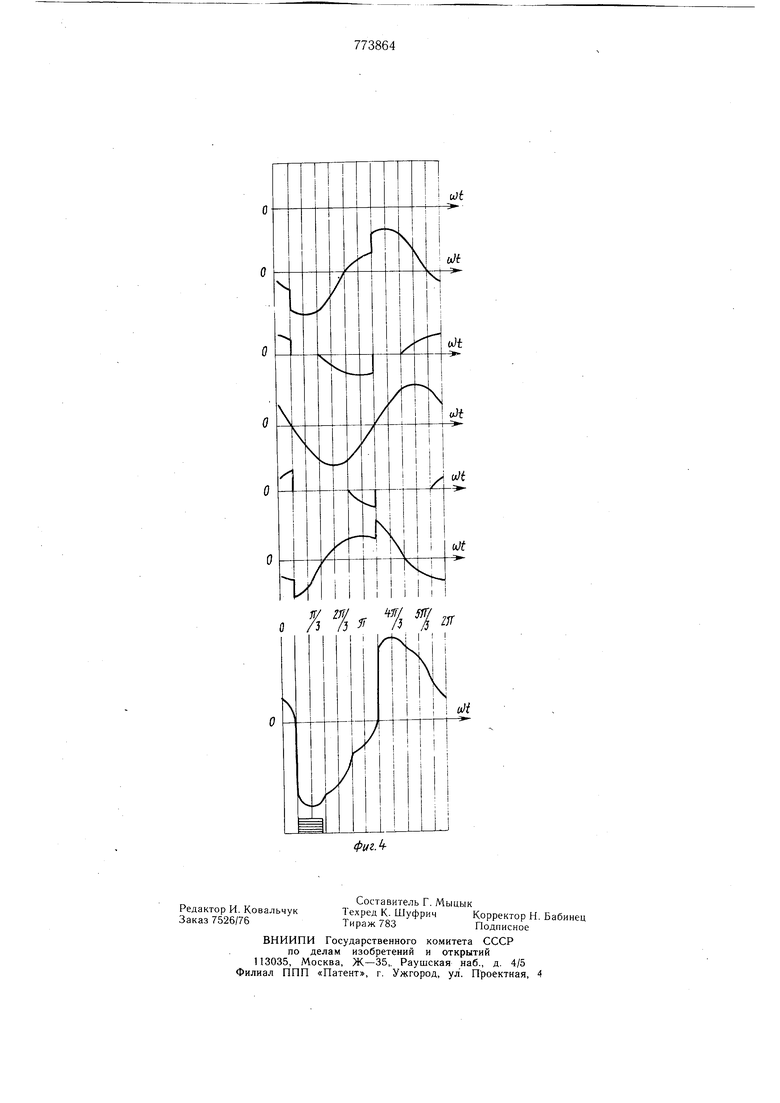
На фиг. 1 показан пример схемной реализации способа; на фиг. 2 - диаграммы маг Нитных потоков щести дросселей схемы фиг. 1 и результирующего потокосцепления; на фиг. 3 - другой пример схемной реализации; на фиг. 4 - временные диаграммы, поясняющие процесс формирования выходного напряжения.
0 В качестве нелинейных реактивных элементов с одним устойчивым состоянием использованы шесть самонасыщающихся дросселей. Каждый дроссель содержит первичную обмотку 1, вторичную обмотку 2 и обмотку управления 3, замкнутую накоротко
управляемым вентилем 4. Все вторичные обмотки 2 соединены последовательно, образуя выходные выводы Н-Н. Поляризация обмоток показана точками. Управляющие электроды всех вентилей объединены. При
0 подключении первичных обмоток к трехфазной сети А, В, С, О и при отсутствии сигналов управления на вентилях, напряжения первичных обмоток 1 равны половине фазного напряжения, а напряжения вторичных обмоток 2 образуют симметричную шести фазную систему,т. е. их су.мма на выходных выводах Н-Н равна нулю.
При постоянно включенном вентиле в цепи управления, каждый дроссель, независимо от начального напряжения на его перд вичной обмотке, автоматически приводится к устойчивому состоянию насыщения воздействием приложенного напряжения одной (положительной) полярности и, благодаря вентилю, не может быть выведен из этого состояния воздействием приложенного напряжения другой (отрицательной) полярности. Т. е. если вентиль в цепи управления дросселя может проводить весь отрицательный полупериод (когда его анодное напряжение положительно), то после нескольких периодов питающего напряжения дроссель оказывается постоянно насыщенным, как во всех магнитных усилителях с самонасыщением. Из этого устойчивого состояния дроссель может быть выведен только размыканием цепи вентиля (отсутствием отпираю дего сигJ нала) в полупериод его проводимости.
Максимальная индукция каждого дросселя при приложенном к его первичной обмотке фазном напряжении выбирается на границе насыщения, а кривая на.магничивания сердечника близка к прямоугольной.
Рассмотрим изменения магнитных потоков щести дросселей, когда на управляющие электроды всех вентилей подается управляющий (отпирающий) сигнал в момент oj t л/6 и при отсутствии нагрузки (т. е. на
5 холостом ходу) прекращается до момента 0) t л/2 (где U) - угловая частота питающей сети). Изменения магнитных потоков щести дросселей иллюстрируются графиком на фиг. 2, в нижней части которого горизонтально заштрихованным прямоугольником изображен управляющий сигнал. Пунктирной синусоидой для каждого дросселя изображено изменение его магнитного потока при отсутствии управляющего сигнала, а сплошной линией - при наличии этого сигнала. Нумерация дросселей и вентилей на фиг. 1 слева направо, а соответствующих диаграмм на фиг. 2 - сверху вниз.
Для трех дросселей (первого, третьего и пятого) момент подачи отпирающего сигнала попадает в те полупериоды,когда вентили третий дроссель насыщается и остается насыщенным интервал о)
до начала отрицательного полупериода, в этом интервале все напряжения трех других вентилей, так что они неуспевают включиться.
Для первого вентиля начало отпирающего сигнала совпадает с началом полупериода его проводимости. В этот полупериод магнитный поток первого дросселя остается практически неизменным, так как падение напряжения на активных сопротивлениях и индуктивностях рассеяния незначительно. Так как вентиль проводит весь отрицательный полупериод, сердечник первого дросселя не может размагничиваться, и его магнитный поток остается неизменным весь период и равным потоку насыщения ф, как показано насамой верхней диаграмме фиг. 2. При неизменном магнитном потоке первого дросселя падение напряжения на его первичной обмотке практически равно нулю и все напряжение фазы «А приложено к первичной обмотке четвертого дросселя. Магнитный поток четвертого дросселя изменяется синусоидально с амплитудой Фп,, которая находится на границе насыщения.
Для третьего вентиля начало отпирающего сигнала попадает в последнюю часть его проводящего полупериода. До конца этого полупериода (со 1 л/2) магнитный поток третьего дросселя остается неизменным. Поэтому в интервале а) t - все напряжение фазы С приложено к шестому дросселю, магнитный поток которого возрастает с удвоенной амплитудой. Далее третий вентиль перестает проводить и, поскольку вторичные обмотки третьего и шестого дросселей становятся обе разомкнуты, напряжение фазы С делится между этими дросселями пополам, а их магнитные потоки изменяются от достигнутых значений в соответствии с приложенными напряжениями . К моменту со t - третий дроссель насыщается и остается насыщенным интервал- a) до начала отрицательного полупериода, в этом интервале все напряжение фазы С опять приложено к шестому дросселю, магнитный поток которого уменьщается с удвоенной амплитудой. Далее напряжение фазы С изменяет знак, третий дроссель начинает размагничиваться и к каждому дросселю опять прикладывается половина фазного напряжения до отпирания третьего вентиля, после чего процесс повторяется.
Для пятого вентиля начало отпирающего сигнала попадает в начальную часть его проводящего полупериода. До конца этого J полупериода (ш t ) магнитный поток пятого дросселя остается неизменным, после чего возрастает и к моменту w t -9 достигает значения насыщения. С начала
,fIJTU
следующего полупериода ш т пятый дроссель размагничивается, в момент «о t
0 вентиль включается и процесс повторяется. Для интервала - & t и 4 напряжение на пятом дросселе равно нулю, и все напряжение фазы В прикладывается ко второму дросселю, изменяя его магнитный поток с удвоенной амплитудой, остальное время фазное напряжение делится между дросселями пополам.
В нижней части фиг. 2 под щестью диаграммами магнитных потоков дросселей (под градуировкой временной щкалы) показана
0 сумма магнитньгх потоков всех дросселей, т. е. потокосцепление выходной обмотки (Н- Н). Это потокосцепление содержит постоянную и переменную составляющие, причем фаза переменной составляющей, в частности минимум ее кривой, строго определяется
началом отпирающего сигнала. Поэтому схема (фиг. 1) позволяет управлять фазой и частотой выходного напряжения независимо от частоты питающей сети.
Л На фиг. 4 представлены диаграммы ЭДС вторичных обмоток дросселей преобразователя фиг. 1, а также их сумма ЭДС на выходных зажимах Н-Н. Диаграмма ЭДС на фиг. 4 расположены друг под другом в том же порядке, как и диаграммы магнитных поS токов на фиг. 2 - диаграммы ЭДС построены как производные от потоков. Диаграмма ЭДС на выходных зажимах Н-Н изображена на фиг. 4 внизу, под градуировкой временной щкалы.
Из анализа работы схемы (фиг. 1) видно, что при использовании в качестве нелинейных реактивных элементов дросселей с вентилями предлагаемый способ позволяет автоматически определять номера включае5 мых вентилей и соответственно фазу выходного напряжения .моментом подачи управляющего сигнала. Длительность этого сигнала выбирается такой, чтобы получить наибольшую амплитуду выходного напряжения при наилучшей ее форме. В схеме фиг. 1 этому соответствует включение половины вентилей, для чего длительность отпирающего сигнала не должна превыщать четверти периода выходной частоты. Для различных схемных реализаций с управляемыми вентилями длительность управляющего сигнала может несколько отличаться в ту или другую сторону. При использовании аналогичных дросселей с неуправляемыми вентилями схемная реализация показана на фиг. 3. Обмотки упр и лсн11я 3 всех дросселей с идентично включсн 1 1ми неуправляемыми вентилями 4 под,к:1ючс1П)1 ii;jp;i,i.R ribHO к одному полностью управляемом}- ключу 5 (например транзисторному). При замыкании ключа 5 ток может течь по тем обмоткам управления и замыкать их накоротко, в цепи которых вентиль находится в этот момент в проводящем состоянии. Поэтому схе.ма фиг. 3 также реализует преобразование частоты предложенным способо.м. Кривая потокосцепления выходной обмотки (Н-Н) для схемы фиг. 3 аналогична таковой для схемы фиг. 2 и отличается только формой. При реализации предлагаемого способа с помощью неуправляемых вентилей для получения наибольшей величины и наилучшей формы выходного напряжения целесообразно замыкать полностью управляемый ключ на время, равное приблизительно половине периода выходной частоты. Итак, предлагаемый способ применим при выключении управляющих цепей как с разрывом тока (принудительное выключение вентилей в схеме фиг. 3), так и без разрыва (естественное выключение вентилей в схеме фиг. 1). В схемах фиг. 1 и фиг. 3 преобразование частоты предлагаемым способом осуществляется при объединении магнитных потоков дросселей в общем контуре. Аналогичным образом можно показать возможность такого преобразования частоты, при объединении токов дросселей в общем узле - общей нагрузке. Итак, рассмотрено преобразование частоты предлагаемым способом при использовании в качестве управляе.мых реактивных элементов с одним устойчивым состоянием дросселей с самонасыщением, когда управление каждым дросселем осуществляется коммутацией на определенное время одной полуволны приложенного напряжения. Очевидно, что способ может быть реализован и при управлении самонасыщающимися дросселями сигналом, синфазно подаваемым на специальные управляющие обмотки дросселей, при этом размагничиваться будут лишь те дроссели, для которых управляющий сигнал попадает в управляющий полупериод. В качестве управляемых элементов с одним устойчивым состоянием могут быть также исоАпользованы другие цепи с нелинейной индуктивностью сегнетоконденсаторы, заряжаемые при отсутствии управляющего сигнала неизменной полярностью, и другие нелинейные элементы. Формула изобретения 1.Способ преобразования частоты путем подачи симметричного многофазного напряжения на нелинейные реактивные элементы, каждый из которых содержит самонасыщающийся дроссель, выполненный на отдельном магнитном сердечнике, вентиль и ключ в цепи одной из обмоток дросселя, и управления упомянутыми элементами коммутацией указанных ключей, отличающийся тем, что, с целью упрощения реализации, управление упомянутыми элементами осуществляют с частотой выходного напряжения и синфазно во всех элементах. 2.Способ по п. 1, отличающийся те.м, что указанное управление осуществляют путем замыкания упомянутых обмоток дросселей через неуправляемые вентили на время, равное половине периода выходной частоты. 3.Способ по п. 1, отличающийся тем, что указанное управление осуществляют путем замыкания упомянутых обмоток дросселей управляемыми вентилями подачей на все их управляющие электроды сигнала, длительность которого равна четверти периода выходной частоты с точностью до -, где гп - число упомянутых элементов. Источники, информации, принятые во внимание при экспертизе 1.Современные задачи преобразовате.тьной техники. Сб. ч. 2, Киев, 1975, с. 132-140. 2.Патент Японии № 48-31408, 56 В 3, 1973. 3.Патент США № 3170107, кл. 321-61, 1965. 4.Патент Швейцарии № 436568, кл. Н 02 J 3/18, 1973. 5.Тонкаль В. Е. и др. Магнитно-полупроводниковые модуляционные преобразователи частоты. Киев, «Наукова думка, 1970, с. 1182-185. 6.Авторское свидетельство СССР по заявке № 2182446/07.
Фиг2
О Q 9
Фаг.З
W iril W W 0 /3 /J Ъ k
