Изобретение относится к электротехнике и может быть использовано, например, в регулируемых электроприводах общепромышленных механизмов, а также транспортных средств.
Наиболее близким к заявленному устройству является электропривод с синхронной реактивной машиной, содержащей многофазную силовую обмотку на статоре с полным шагом. На валу синхронной реактивной машины механически установлен датчик положения ротора. Обмотки каждой фазы статора состоят из двух полуобмоток, магнитные оси которых пространственно сдвинуты относительно друг друга на 90 электрических градусов. Начала полуобмоток первой группы подключены к питающей сети переменного трехфазного тока, а концы второй группы полуобмоток - на многофазный вход тиристорного коммутатора. Кроме того, между катодной и анодной группами тиристорного коммутатора включен датчик тока. Выход датчика тока подключен к одному из входов регулятора тока, а на другой вход регулятора тока подключен источник задания величины тока. Выход регулятора тока и датчик положения ротора подключены к управляющему входу тиристорного коммутатора (см. пат. РФ №2408972 МПК H02P 27/04, H02P 25/08, H02P 19/10. «Электропривод с синхронной реактивной машиной и способ управления им», опубл. 10.01.2011).
Управление электроприводом с синхронной реактивной машиной производится по сигналу с датчика положения ротора синхронной реактивной машины, при этом управляющие импульсы подают на два вентиля разноименных групп (катодных и анодных) тиристорного коммутатора так, чтобы линия физической нейтрали двигателя попадала под сбегающий край полюса.
Недостатком прототипа является то, что, во-первых, из-за неполной управляемости тиристоров не удается закрыть вентили тиристорного коммутатора в любой произвольный момент времени, а это в некоторых случаях затягивает продолжительность импульса тока в цепях статора, во-вторых, схема содержит избыточное число управляющих элементов, а именно в схеме с трехфазным мостовым тиристорным коммутатором их шесть (по числу тиристоров).
В основу предлагаемого изобретения положена задача, заключающаяся в возможности повышения качества процессов управления и упрощения схемы за счет сокращения числа каналов управления вентилями.
Решение поставленной задачи достигается тем, что электропривод, содержащий синхронную реактивную машину с двумя группами трехфазных (многофазных) обмоток с полным шагом, при этом обмотки одноименных фаз статора включены между собой согласно и последовательно так, что пространственные магнитные оси этих обмоток взаимно ортогональны, датчик положения ротора снабжен неуправляемым многофазным выпрямителем, начала обмоток первой группы двигателя подключены к питающей сети, а концы второй группы - на вход выпрямителя, согласно изобретению между анодными и катодными группами выпрямителя через датчик тока включены параллельно соединенные конденсатор и цепочка из последовательно соединенных транзисторного ключа с обратным диодом и дросселя с обратным диодом, на управляющий вход транзисторного ключа подключен выход регулятора тока, на первый его вход подключен выход коммутатора, а на второй вход - выход датчика тока, первый вход коммутатора подключен к источнику задания величины тока, второй вход - к выходу измерителя пространственного положения вектора напряжения на статоре двигателя, третий вход - к выходу датчика положения ротора, входы измерителя пространственного положения вектора напряжения на статоре двигателя подключены к фазным зажимам источника трехфазного напряжения.
Особенностью предлагаемого решения является то, что, во-первых, благодаря взаимному ортогональному пространственному расположению обмоток статора каждой фазы, когда витки одной из последовательно включенных обмоток находятся напротив межполюсного промежутка и тем самым создают магнитный поток, направленный вдоль магнитной оси ротора, то витки второй обмотки этой фазы находятся над полюсом, взаимодействуют с потоком возбуждения первой обмотки, создавая электромагнитный момент электрической машины; во-вторых, благодаря наличию датчика положения ротора транзисторный ключ открывается и пропускает ток по обмоткам статора лишь в те отрезки времени, когда взаимное положение полюсов явнополюсного ротора и магнитное поле, создаваемое токами статора, соответствует двигательному электромагнитному моменту электрической машины. При этом ротор имеет явнополюсную конструкцию и не несет на себе обмоток.
Предлагаемое техническое решение сохраняет основные технические преимущества прототипа: простоту конструкции электрической машины, высокую технологичность ее изготовления, высокую механическую прочность и жесткость ротора, отсутствие обмоток на роторе.
Вместе с тем предлагаемое решение отличается существенной простотой (содержит лишь один управляемый силовой элемент - транзисторный ключ) и улучшенной управляемостью (так как транзистор, в отличие от тиристора, можно открывать и закрывать в любой момент времени).
Сущность изобретения поясняется чертежами, где изображены:
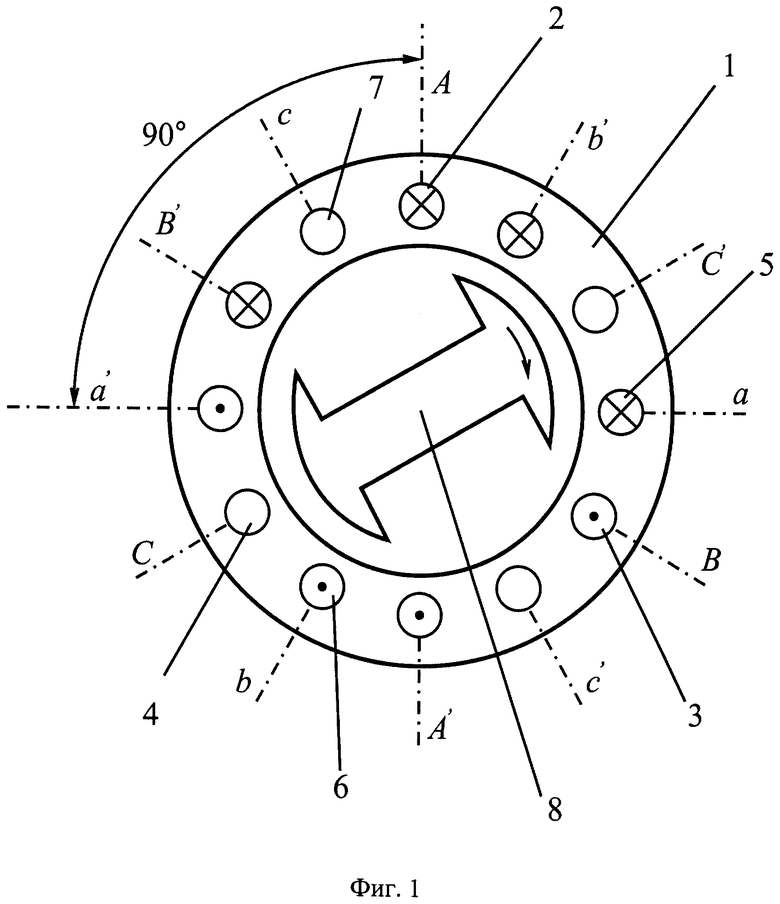
- на фиг.1 - схематический поперечный разрез синхронной реактивной машины;
- на фиг.2 - пример функциональной схемы;
- на фиг.3 - пространственная векторная диаграмма, поясняющая взаимодействие потокосцепления ψс статора с явнополюсным массивным ротором;
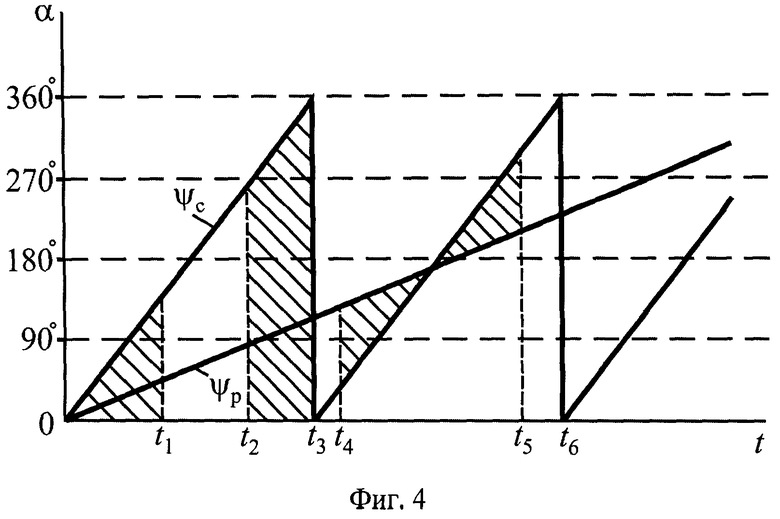
- на фиг.4 - характер изменения во времени t угла поворота вектора потокосцепления ψс статора и вектора результирующего потокосцепления ψрз, совпадающего с продольной магнитной осью статора.
На фиг.1 представлен в разрезе пример шестифазной синхронной реактивной машины, когда в пазах статора 1, расположенных в плоскостях А-А', В-В' и С-С', сдвинутых пространственно на 120 электрических градусов, размещены обмотки 2, 3, 4. В пазах статора 1, расположенных в плоскостях a-a', b-b', с-с', сдвинутых между собой также на 120 электрических градусов, размещены такие же обмотки 5, 6, 7. Обмотки 2 и 5, 3 и 6, 4 и 7 соединены между собой согласно. Магнитные оси обмоток одноименных фаз 2 и 5, расположенных в плоскостях А-А', а-а', 3 и 6, расположенных в плоскостях B-B', b-b', 4 и 7, расположенных в плоскостях С-С' и с-с', сдвинутых относительно друг друга пространственно на 90 электрических градусов. Обмотки 2, 3, 4, 5, 6 и 7 образуют одну многофазную электрическую схему.
Ротор 8 синхронной реактивной машины выполнен явнополюсным. В примере, изображенном на фиг.1, длина полюсной дуги ротора составляет 90°, длина межполюсного промежутка - также 90°.
Начала обмоток 2, 3, и 4 (фиг.2) подключены к фазным зажимам А, В и С источника трехфазного напряжения питания. Концы обмоток 5, 6 и 7 подключены к входу трехфазного мостового неуправляемого выпрямителя 9. Диоды 10, 11 и 12 образуют катодную группу, а диоды 13, 14 и 15 - анодную группу вентилей. Между анодной и катодной группами вентилей включен датчик тока 16. Между датчиком тока 16 и анодной группой вентилей выпрямителя 9 включены параллельно конденсатор 17 и цепочка из последовательно соединенных транзисторного ключа 18 с транзистором 19 и обратным диодом 20 и дросселя 21 с обратным диодом 22. На управляющий вход транзисторного ключа 18 подключен выход регулятора тока 23. На первый вход регулятора тока 23 подключен выход коммутатора 24, а на второй вход - выход датчика тока 16. На первый вход коммутатора 24 подается сигнал Uзт, пропорциональный желаемой величине тока статора. На второй вход коммутатора 24 подается сигнал с выхода датчика 25, измеряющего по мгновенным значениям напряжений на фазных зажимах А, В и С пространственное (угловое) положение αс, результирующего вектора напряжения источника питания. На третий вход коммутатора 24 подается сигнал αp с выхода датчика 26 угла поворота вала ротора 8 двигателя. Состояние цепей коммутатора 24 зависит от величины разницы показаний датчиков 25 и 26 Δα=αс-αp, a именно: когда эта разница попадает в интервалы 0<Δα<90 или 180<Δα<270 электрических градусов, то коммутатор 24 пропускает сигнал Uзт на вход регулятора 23, задавая тем самым требуемое значение тока, протекающего по обмоткам 2…7 статора двигателя. Когда Δα находится вне указанных интервалов, то сигнал Uзт на вход регулятора тока 23 через коммутатор 24 не проходит.
На фиг.3 представлена векторная диаграмма, на которой изображены: ψс - пространственный вектор результирующего потокосцепления, создаваемого токами всех обмоток 2…7 статора, подключенных к зажимам А, В, С питающей сети, при непрерывно открытом ключе 18; ψp - пространственный вектор, направленный по продольной оси магнитной системы ротора. В идеальном случае, когда не учитываются потоки рассеяния, а индуктивность по поперечной оси электрической машины пренебрежимо мала, направление этого вектора совпадает с направлением вектора результирующего (в зазоре) потокосцепления электрической машины; αс и αp - углы поворота векторов ψс и ψр относительно неподвижной оси N - N, принятой за начало отсчета.
На фиг.4 изображен примерный характер изменения во времени t угла поворота α векторов ψс и ψp при вращении двигателя со скоростью ниже синхронной. Заштрихованные участки времени 0…t1, t2…t3 соответствуют включенному состоянию транзисторного ключа 18, незаштрихованные - отключенному.
В исходном состоянии схемы с целью достижения наглядности совместим начальные значения углов поворота векторов ψc и ψp на фиг.4. Этому состоянию соответствует следующее начальное мгновенное положение ее элементов. Ток в фазе А статора, протекающий по обмоткам 2 и 5, положительный и максимальный, а токи в фазах В и С - отрицательные и равны половине тока в фазе А; в этот момент времени угол поворота вектора ψс принят αc=0. Угол поворота вектора ψp принят также αp=0, а сам ротор занимает пространственное положение, как на фиг.1. Там же указаны и направления токов в обмотках статора в начальный момент времени.
Электропривод работает следующим образом. Так как частота напряжения сети, питающей цепи статора, стабильна, то угол αc поворота вектора ψc изменяется по линейному закону от 0° до 360°, после чего начинается новый период, аналогичный предыдущему и т.д. (см. кривую ψс на фиг.4). Угол поворота вектора ψp, жестко связанного с ротором двигателя, изменяется медленнее, если угловая скорость двигателя ниже синхронной (кривая ψp на фиг.4). Когда угол αp достигает 360°, также происходит сброс функции ψp до нуля. На отрезках времени 0…t1, t2…t3, t4…t5 и т.д., где выполняются условия 0°<Δα<90° или 180°<Δα<270° и где, следовательно, момент реактивного двигателя, создаваемый токами статора, двигательный, коммутатор 24 пропускает сигнал Uзт на вход регулятора 23, а контур регулирования тока, образованный силовыми цепями двигателя, ключом 18, регулятором тока 23 и датчиком тока 16, обеспечивает протекание тока по цепям статора в соответствии с величиной Uзт.
На отрезках времени t1…t2, t3…t4 и т.д., которые в случае протекания тока по цепям статора соответствовали бы тормозящему режиму, сигнал Uзт через коммутатор 24 не проходит, ключ 18 заперт, двигатель момента не развивает. В итоге двигатель работает в импульсном режиме, развивая момент лишь на отрезках времени 0…t1, t2…t3 и т.д.
Величина момента двигателя определяется величиной тока, протекающего по обмоткам статора двигателя и задаваемого напряжением Uзт.
Техническим результатом предлагаемого изобретения является регулируемый бесконтактный электропривод, который характеризуется повышенной надежностью в условиях работы с большими перегрузками по моменту, с тяжелыми и весьма тяжелыми условиями эксплуатации. При этом весь названный перечень привлекательных эксплуатационных характеристик электропривода достигается при относительно простом регулируемом устройстве, которое выполнено на одном транзисторном ключе.
Промышленная применимость предлагаемого решения
Электропривод с синхронной реактивной машиной может быть рекомендован для общепромышленных механизмов (насосов, вентиляторов, транспортеров и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2288535C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2371831C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА В ЭЛЕКТРОПРИВОДЕ С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2013 |
|
RU2541359C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2408973C1 |
| Система регулирования электропривода насосного агрегата и способ работы системы | 2018 |
|
RU2687175C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2007 |
|
RU2337466C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2007 |
|
RU2346376C1 |

Изобретение относится к электротехнике и может быть использовано, например, в регулируемых электроприводах общепромышленных механизмов, а также транспортных средств. Техническим результатом является повышение качества процессов управления. Электропривод с синхронной реактивной машиной содержит две группы многофазных обмоток с полным шагом, равномерно распределенных вдоль внутренней расточки статора, при этом обмотки одноименных фаз статора включены между собой согласно и последовательно так, что пространственные магнитные оси этих обмоток взаимно ортогональны, начала обмоток первой группы подключены к питающей сети, а концы второй группы - на вход неуправляемого выпрямителя, датчик положения ротора. Между анодными и катодными группами выпрямителя через датчик тока включены параллельно соединенные конденсатор и цепочка из последовательно соединенных транзисторного ключа с обратным диодом и дросселя с обратным диодом, на управляющий вход транзисторного ключа подключен выход регулятора тока, на первый его вход подключен выход коммутатора, а на второй вход - выход датчика тока, первый вход коммутатора подключен к источнику задания величины тока, второй вход - к выходу измерителя пространственного положения вектора напряжения на статоре двигателя, третий вход - к выходу датчика положения ротора, входы измерителя пространственного положения вектора напряжения на статоре двигателя подключены к фазным зажимам источника трехфазного напряжения. 4 ил.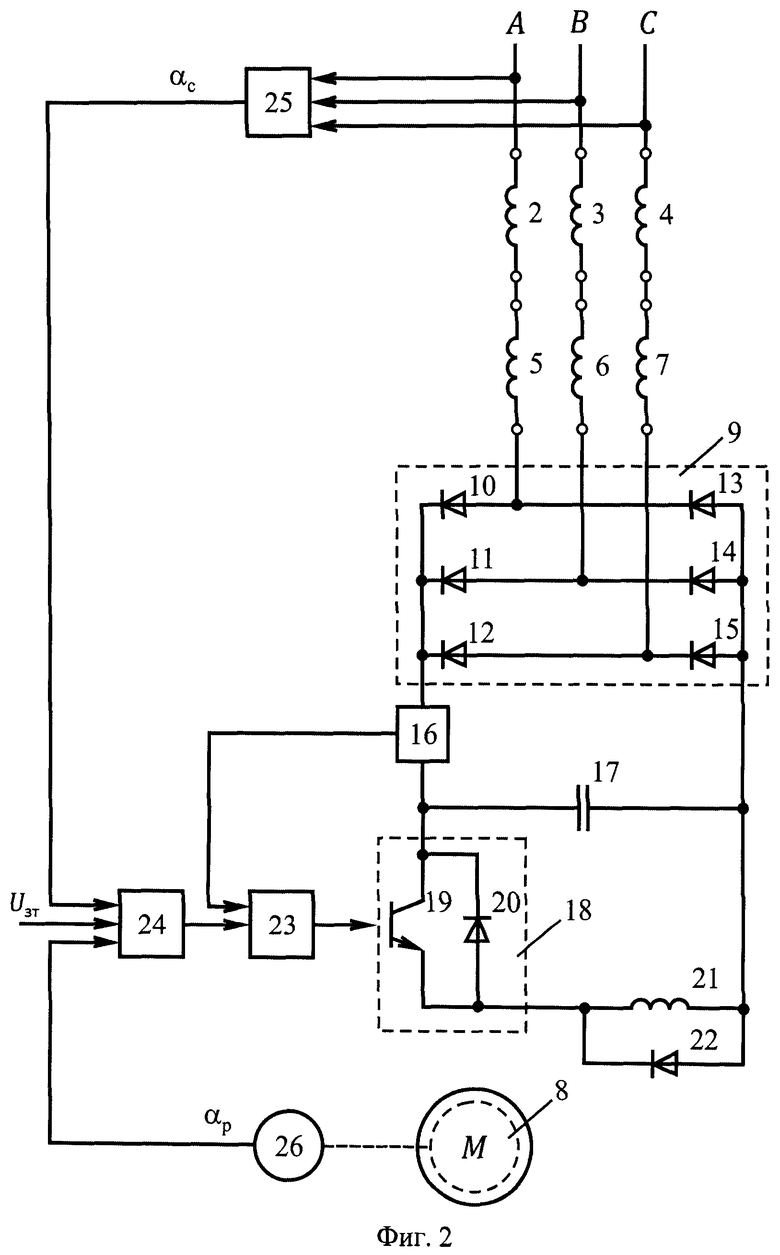
Электропривод с синхронной реактивной машиной, содержащей две группы многофазных обмоток с полным шагом, равномерно распределенных вдоль внутренней расточки статора, при этом обмотки одноименных фаз статора включены между собой согласно и последовательно так, что пространственные магнитные оси этих обмоток взаимно ортогональны, начала обмоток первой группы подключены к питающей сети, а концы второй группы - на вход неуправляемого выпрямителя, датчик положения ротора, отличающийся тем, что между анодными и катодными группами выпрямителя через датчик тока включены параллельно соединенные конденсатор и цепочка из последовательно соединенных транзисторного ключа с обратным диодом и дросселя с обратным диодом, на управляющий вход транзисторного ключа подключен выход регулятора тока, на первый его вход подключен выход коммутатора, а на второй вход - выход датчика тока, первый вход коммутатора подключен к источнику задания величины тока, второй вход - к выходу измерителя пространственного положения вектора напряжения на статоре двигателя, третий вход - к выходу датчика положения ротора, входы измерителя пространственного положения вектора напряжения на статоре двигателя подключены к фазным зажимам источника трехфазного напряжения.
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| US4121148A1,17.10.1978 | |||
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ И ОХЛАЖДЕНИЯ ПЛАСТМАССОВЫХ ПРОФИЛЕЙ | 1998 |
|
RU2145545C1 |

