(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ПРОЦЕССОМ КУЛЬТИВИРОВАНИЯ МИКРООРГАНИЗМОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом непрерывного культивирования микроорганизмов | 1980 |
|
SU968794A1 |
| Система автоматического управления процессом непрерывного выращивания микроорганизмов | 1974 |
|
SU527472A1 |
| Способ автоматического управления процессом непрерывного выращивания микроорганизмов | 1981 |
|
SU1002357A1 |
| Система автоматического управления процессом непрерывного выращивания микроорганизмов | 1981 |
|
SU1073283A1 |
| СПОСОБ ПОЛУЧЕНИЯ БИОМАССЫ ДРОЖЖЕЙ | 2004 |
|
RU2268924C1 |
| Способ автоматического управленияпРОцЕССОМ НЕпРЕРыВНОгО КульТиВиРОВАНияМиКРООРгАНизМОВ и СиСТЕМА дляЕгО ОСущЕСТВлЕНия | 1979 |
|
SU810802A1 |
| Способ получения биомассы метанокисляющих микроорганизмов и линия для ее производства | 2020 |
|
RU2755539C1 |
| СПОСОБ НАПРАВЛЕННОГО БИОСИНТЕЗА ЛИМОННОЙ КИСЛОТЫ | 1995 |
|
RU2098485C1 |
| СПОСОБ ПОЛУЧЕНИЯ СТИМУЛЯТОРА РОСТА МИКРООРГАНИЗМОВ | 2011 |
|
RU2482175C1 |
| Способ автоматического управления процессом выращивания микроорганизмов | 1977 |
|
SU662580A1 |
1
Изобретение откосится к микрсбиологической промышленности.
Известен способ автоматического управления процессом культивирования микроорганизмов, использукяций для выработки управляющего воздействия подстраиваемую математическую модель ферментация.
Наиболее близким по технической сущности к предлагаемому является способ автоматического управления процессом культивирования микроорганизмов, предусматрив-ЕЮЩий определение величины экономического коэффициента использования субстрата через определенные промежутки времени, сравнение с предыдущим значением и в зависимости от результата сравнения корректировку концентрации питательного субстрата и расхода воздуха и раствора питательных солей.
Недостатками известных способов автоматического управления процессом культивирования микроорганизмов является TOV что они Мсшо эффективны, так как предлагают управление по статической характеристике процесса, который обладает значительной инерционностью и в промежутках времени 4-6 ч (время переходного процесса) ..
является неуправляемым по концентрации питательного субстрата.
Целью изобретения является интенсификация процесса культивирования
5 микроорганизмов и повышение эффективности использования питательного субстрата.
Эта цель достигается тем, что коррекцию концентрации субстрата осуществляют в зависимости от величины концентрации питательного субстрата, соответствуквдей наибольшему усредненному значению коэффициента выхода биомассы.
15 При этом вычисление коэффициента выхода биомассы производят с учетом динамики процесса, путем периодического определения значений ординат весовой функции, которые используют для
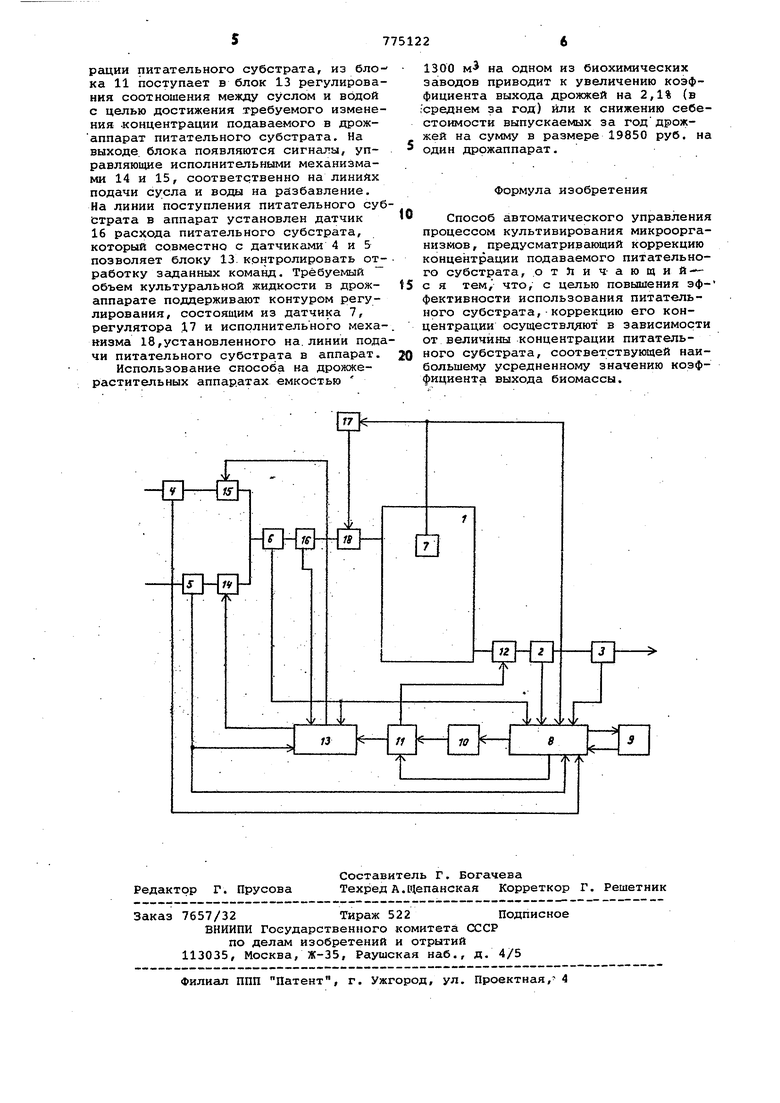
20 приведения количества поступающих питательных веществ к выходу объекта управления - концентрации дрожжей в дрожжерастильном аппарате. В статике
25 GAP ()-САР Сдр
.i-. t---. . . --При Dconst, (Л
i GC ( с
где Gjjp , GC - количество дрожжей и
субстрата; 30 QO ъ расход сусла и воды; CAP --c концентрация дрожжей и питательного субстра та; О -скорость разбавления. .. С учетом динамических свойств про цесса мгновенное значение CAP. (2) )-h(t-t;)de где h(t) - весовая функция; Т - память объекта (время переходного процесса кана ла С(-, при D const) t - текущий момент. Процессами, которые о.бладают дина мическими свойствами, присущими проц су культивирования микроорганизмов, необходимо управлять таким-образом, чтобы получить максимальное значение показателя, по которому ведут управление за известный промежуток времени Т, равный в настоящем способе дли не памяти объекта. С учетом этого If ( j Ccrobit-i -W( : iT , или () в дискретном виде . пД|: ы ,. b-i X J-o -i где N - количество рещений згщачи на интервале времени Т; а - количество ординат весовой функции h(t). При этом технологические ограничения по концентрации остаточных питательных веществ Ссдст.техн конце раций дрожжей в выходящей из дрожаппарата суспен.зии представлены как г JLV г - с.ост.техн К1 А с. 1 я Лр--гехч 7 APi где CC.OCT и С др - параметры, ана логичные расположенным в левой части неравенств (5) и (6), рассчитываются в вычислительном устройстве. Реализация предлагаемого способа осуществляется следуюдим образом. Допустиг-1ую область изменения кон. центрации питательного субстрата раз бивают на ряд значений. Каждому изэтих значений при моделировании на адаптивной динамической модели соот . ветствует определенная траектория дв жения процесса по концентрации дрож жей и остаточным питательным вещест вом в дрожжевой суспензии, выходящей из дрожаппарата, и вычисленное по со ответствующей формуле значение коэфф циента выхода биомассы, которые усре няются на интервале времени, равном длине памяти объекта. Среди получ ного ряда траекторий, удовлетворяющи граничениям, выбирая ту, которая меет наибольшее усредненное значение коэффициента выхода биомассы, а соответствующее ей значение концентрации питательного субстрата используют для коррекции текущего значения концентрации питательного субстрата на промежутках времени, меньших длинЬ пере-, ходного процесса. На чертеже представлена блок-схема способа.автоматического управления процессом культивирования микроорганизмов . Используя информацию о процессе . выращивания дрожжей вдрожаппарате 1, поступающую or датчика 2 концентрации остаточных питательных веществ и датчи-ка 3 концентрации дрожжейна линии дрожжевой суспензии,.выходящей из дрожаппарата, а -также от датчика 4 и 5 расхода питательных веществ и воды на линиях материальных потоков сусла и воды, на разбавление, датчика б концентрации питательного-субстрата на линии подачи в аппарат и датчика 7 объема культуральной-жидкости в аппарате,блок & адаптивной модели, представляющий- собой систему дифференциальных уравнений, периодически подстраивают, приводят к адекватности процессу в аппарате. Используя блок 8, блок 9 определяет значения ординат весовой функции h(t),применяемой в формуле (2) для учета динамики процесса. Моделируя в блоке 8 процесс культивирования микроорганизмов при различных значениях концент.рации пит-ательного субстрата, получают соответствующий ряд траекторий движения системы (процесса), каждой из точек .которых соответствуют определенные значения концентрации дрожжей и кон- центрации остаточных питательных веществ в выходящей из дрожаппарата дрожжевой суспензии и вычисляемые в блоке 10 по формуле (2) значения коэффициента выхода биомассы. Вычисленные в блоках 8 и 9 значения концентрации дрожжей, остаточных- питательных веществ и коэффициента выхода биомассы поступают в блок 11, где их усредняют по формулам (t) , (5), (6) и одновременно проверяют на ограничения - формулы- (5), (&) . Если ни одна из траекторий не удовлетворяет заданным ограничениям, то сигнал об этом из блока 11 поступает на исполнительный орган 12 на линии дрожжевой суспензии,.выходящей из дрожаппарата, на частичное перекрытие. При выпол нении ограничений частью траекторий либо всеми среди них в блоке 11 находят траекторию с наибольшим усредненным значением коэффициента выхода биомассы и соответствующее ему значение концентрации питательного субстрата. Сигнаш, соответствующий найденному значению концент
