1
Изобретение относится к устрой- . ствам для определения несущей способности свай в процессе их забивки и динамических испытаний. Оно может быть использовано при строитель 5 стве свайных фундаментов.
Известно устройство для измерения отказов свай при их забивке - механический отказомер, состоящий из крепежнсго устройства, цилиндрического бара-10 бана и скользящей каретки с записывающим устройством) позволяющим получать откаэограммы 1,
Из известных устройств наиболее близко по технической сущности ус- 15 тройство для определения перемещения сваи при ее забивке, включаиняее крепежное приспособление, датчик с инерционной Массой и упругим элементом регулируемой жесткости и регистрирую- 20 щуЮ аппаратуру 2 .
Недостатками известных устройств является невозможность измерения им распространения ударной волны н материале ствола сваи и энергии ее сво- 25 бедных затухающих колебаний после удара молотом, а также недостаточная точность измерения отказов забиваемой сваи. Величина энергии ударной волны в стволе и вертикальных затухающих 30
колебаний сваи, зависящая от ее размеров и физико-механических свойств прорезаемых грунтов, может составлять значительную часть полной энергии, сообщаемой свае молотом.
Цель изобретения - повышение точности измерений за счет определения величин энергии ударной волны в стволе сваи и свободных колебаний сваи.
Цель достигается тем, что в устройстве для определения перемещения сваи при ее з-абивке, включающем крепежное приспособление, датчик с инерционной массой и упругим элементом регулируемой жесткости и регистрирующую аппаратуру, датчик выполнен в виде двух полых штоков, установленных один в другом, а инерционная масса и упругий элемент выполнены с центральными отвер стиями, причем один шток снабжен регулировочным винтом и фоторезистором а другой - пропущен через центральные . отверстия инерционной массы и упругого элемента и снабжен дополнительным фоторезистором, при этом фоторезисторы связаны электрической цепью.
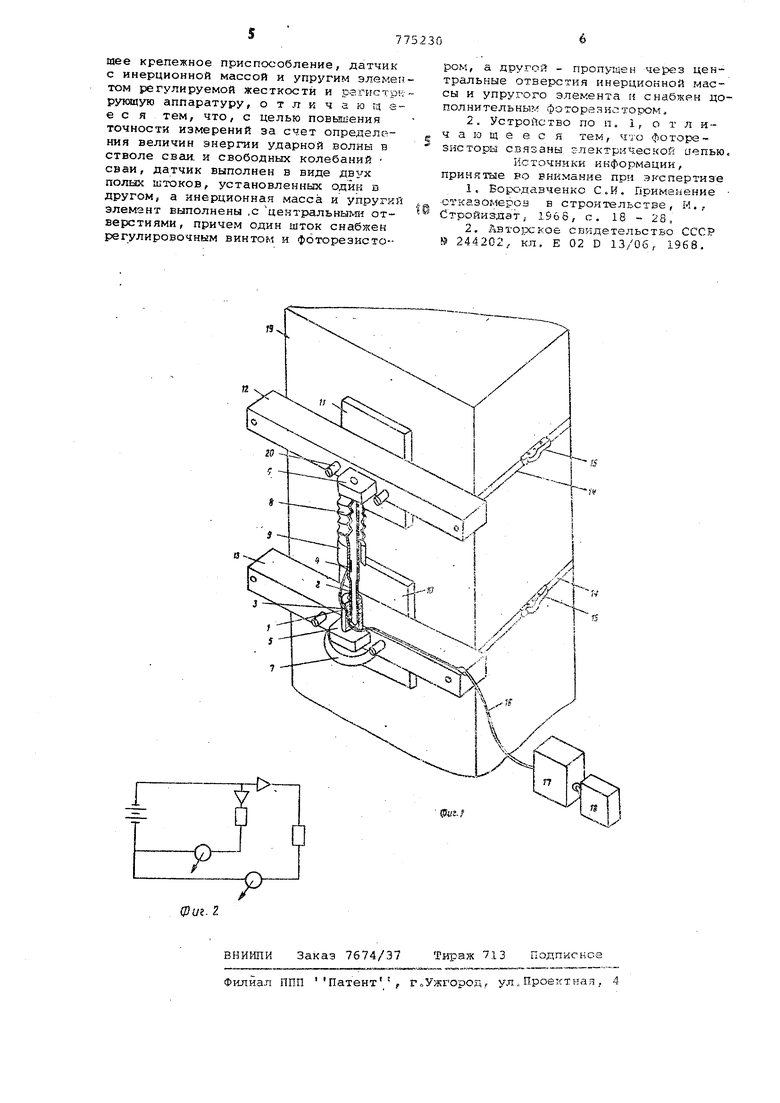
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 2 показана электрическая схема датчиков деформаций и перемещений. Устройство представляет собой измерительный механизм, состоящий из взаимосвязанных датчиков деформаций и перемещений, имеющих полые, телескопические штоки 1 и 2, внутри которых смонтированы фоторезисторы 3 и 4. Измерительный механизм установлен в гнездах консолей-держателей 5 и 6 при полых телескопических што ков 1 и 2, имеющих на опорных концах щарниры (йа фигурах не показаны). Регулировочный винт 7, позволяюадай изменять взаимное расположение телескопических штоков 1 и 2 датчика деформаций и приводить измерительный механизм в рабочее положение, пропущен через нижнюю консоль«, держатель 5 и соединен с полым штоко 1. Упругий элемент 8 датчика перемещений с инерционной массой 9, устано ленной с возможностью перемещения вдоль боковой поверхности верхнего штока 2, жестко закреплен у его опор ного конца. Консоли-держатели 5 и б жестко соединены с накладными фиксиру ющими пластинами 10 и пропущены через верхнюю и нижнюю струбцины 12 и 13 соответственно с регулируемыми тягами 14 И замком 15. Выходные сигналы от измерительного механизма по кабелю 16 подаются к регистрирующему прибору 17, имеющему блок 18 записи и воспроизведения регистрируемых сигналов. Жесткое соединение накладных фиксирующих пла стин со сваей 19 осуществляется внедрением в бетон анкерукяцих винтов 20 Устройство работает сЯедую1дим образом. На свае 19 при помои(и верхней и нижней струбцин 12 и 13 с регулируемыми тягалш 14 и замками 15 прижима усилием устанавливают накладные фиксирующие пластины 10 и 11 между кoнcoля G -дepжaтeлями 5 и 6, которых помещают в измерительный механизм.Из мерительный механизм .привадится в ра бочее положение регулировочным винтом 7, изменяющим взаимное,расположе ние телескопических штоков 1 и 2 дат чика деформаций, Перед измерениями (атчики; деформаций и перемещений- гра дуируются .Жесткость упругого элемент 8 и инерционная масса 9 датчика перемещений устанавливаются так ,чтобы его собственная частота была в 5:6 раа меньше частоты свободных колебаний систекы свая-грунт. I После удара молота по свае 19 рас прЬстраняющаяся волна сжатия в ствол производит взаимное смещение телеско пических штоков 1 и 2, изменяя сопро тивление фоторезистора 3, при этом в цепи датчика деформаций возникает электрический сигнал, пропорциональный деформаций сваи (фиг. 2) на баз между |КОнсолями-держателями 5 и 6. При наличии сигнала в цепи датчика деформёщий, величина которого регули 7 руется взаимным расположением телескопических штоков 1 и 2, згичыкается электрическая цепь датчика перемещений, в которой при смещениях упругого элемента 8 с инерционной массой 9 относительно боковой поверхности верхнего полого штока 2 изменяется сопротивление фоторезистора 4 и появляется электрический сигнал, пропорциональный амплитуде А и частоте свободщх колебаний сваи в грунте. Процессы динамических деформа йий и свободных колебаний свай в грунте записываются на осциллографную ленту, обеспечивая существенные преиsmjecTBa в точности записи, обработки и анализа экспериментальных данных. Например, имеется возможность механизированной расшифровки осциллограмм для получения величин остаточной и упругой части отказов, относительных деформаций атериала, частоты и амплитуды свободных колебаний сваи в грунте. Определение указанных параметров позволяет более точно рассчитывать несущую способность забивных свай в песчаных и глинистых грунтах средней плотности из уравне-, ния энергетического баланса: « -РПР., где Q - вес ударной части молота Н - высота падения ударной: части молота; TLj - предельная величина динамических сил сопротивления грунта; 6 - отказ сваи; К переходный коэффициент }t, - энергия свободных колебаний сваи; NS) - энергия ударной волны в ствсЗначения энергаи ударной волны в стволе, энергии свободных колебаний и отказа сваи определяются по результатам измерений; VU , г .с2. .с .а 1 съ о.та) с с ) где m -Масса сваи с учетом присоединенной массы грунта и молота, moht максимальная амплитуда свободных колебаний, г - площадь сечения сваи; сЬ - максимальное значение отноOwom сительной деформации ствола; t - модуль упругости ствола; €с - длина сваи. Наличие.механизма для измерения деформсщий и перемещений сваи обеспечивает повышение точности измерений и учет параметров, определяющих ее несущую способность. Формула изобретения 1. Устройство для определения перемещения сваи при ее забивке, включаю
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| Отказомер | 1978 |
|
SU727758A1 |
| Устройство для погружения полой сваи | 1982 |
|
SU1130673A1 |
| УСТРОЙСТВО для ОП1РЕДЕЛЕНИЯ ОТКАЗА СВАЙ ПРИ ИХ ЗАБИВКЕ В ГРУНТ | 1973 |
|
SU387255A1 |
| Шпунтовая свая U-образного типа | 2023 |
|
RU2822838C1 |
| СПОСОБ ЗАБИВКИ СВАЙ | 2015 |
|
RU2672118C1 |
| ПРИБОР КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1992 |
|
RU2020404C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕСУЩЕЙ СПОСОБНОСТИ ГРУНТА ПРИ ЗАБИВКЕ СВАЙ | 1994 |
|
RU2102562C1 |
| СПОСОБ ЗАБИВКИ СВАЙ ГИДРОМОЛОТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2233364C1 |
| Отказомер | 1982 |
|
SU1076536A1 |
