Область техники
Изобретение относится к способу оптимизации забивки свай.
Предпосылки изобретения
Обычно ударную энергию свай, забиваемых в грунт свайным копром регулирует оператор свайного копра. Указанное оператор копра выполняет, отслеживая забивку сваи в грунт визуально и/или по результатам измерений, производимых измерительными приборами, осуществляющими мониторинг перемещения бабы свайного копра, например, прогресс погружения (т.e. продвижение вперед) сваи, или несущей способности, определенной на основе указанного, и применяет указанное для регулирования ударной энергии, производимой массой, т.e. блоком, перемещающимся внутри бабы свайного копра (в нормальных условиях, посредством регулирования высоты подъема блока). В нормальных условиях, на основе собственного опыта, оператор старается выбрать продвижение вперед с уменьшением по возможности общего времени, затраченного на забивку сваи в грунт, при этом можно получить минимизацию общего времени, затраченного на забивку свайного поля для заданной площади строения.
Недостаток известного способа состоит в том, что при его применении сваю могут забивать, используя слишком большую или слишком малую ударную энергию (вне зависимости от опыта оператора). Применение слишком большой ударной энергии имеет недостаток в том, что, когда ударную энергию, производимую блоком, увеличивают, частоту ходов в нормальных условиях уменьшают, поскольку большая ударная энергия требует прохождения увеличенной длины перемещения (т.e. высоты подъема блока). В результате, несмотря на большее продвижение вперед сваи, общее время, затраченное для забивания сваи в грунт, может увеличиться, по отношению к скорости, которую можно достичь с немного меньшей ударной энергией. Применение слишком большой ударной энергии может, в самом худшем случае, вызвать разрушение сваи, поскольку, когда несущая способность слишком мала в сравнении с ударной энергией, ударная волна, действующая на конце сваи в результате удара, должна вызывать растяжение на свае, указанное растяжение может в таком случае превышать прочность сваи на растяжение. Применение ударной энергии, которая слишком мала, в свою очередь, имеет недостаток в том, что потенциальная энергия, произведенная ударной энергией, не дает силы, достаточно превышающей несущую способность сваи. В результате, свая не погружается в грунт должным образом, а ударная энергия, действующая на сваю, главным образом возвращается в блок. Недостатки настоящего способа проявляются особенно сильно, когда оператор свайного копра неопытен.
Сущность изобретения
Задачей изобретения является обеспечение новаторского способа, которым забивание сваи в грунт с обеспечением требуемой несущей способности может быть выполнено быстрее и надежнее, чем раньше, так чтобы свая не повреждалась в процессе забивания.
Задача изобретения достигается способом согласно изобретению, поскольку для регулирования ударной энергии в способе во время каждого забивающего удара по свае кинетическую переменную Q1 удара измеряют с помощью измерительных приборов в соединении с бабой свайного копра, указанная переменная пропорциональна кинетической энергии блока во время удара, и кинетическую переменную Q3 обратного перемещения измеряют во время обратного перемещения, указанная переменная пропорциональна кинетической энергии блока во время обратного перемещения; на основе соотношения Q1/Q3 кинетических переменных можно затем определить, насколько далеко свая продвинулась под действием каждого забивающего удара. Таким образом, посредством определения соотношения Q1/Q3 кинетических переменных, такого, которое дает самое короткое возможное полное время ttot забивания, и с помощью регулирования кинетической энергии удара на основе указанного, каждый забивающий удар может быть выполнен оптимальным так, что продвижение вперед, произведенное им, должно приводить к возможно более короткому полному времени ttot забивания сваи, при этом забивание сваи в грунт должно всегда выполняться так быстро, как только возможно.
В настоящей заявке соотношение Q1/Q3 кинетических переменных относится к взаимосвязи Q1/Q3 между переменной Q1, пропорциональной кинетической энергии блока во время удара и переменной Q3, пропорциональной кинетической энергии блока во время соответствующего обратного перемещения. Кинетическая переменная Q1 удара и кинетическая переменная Q3 обратного перемещения, а также соотношение Q1/Q3 кинетических переменных, определенное при этом может, следовательно, в отличающийся вариантах применения изобретения, относиться, например, к времени, требуемому для перемещения на данное расстояние, т.e. времени T1 удара, и времени, требуемому для перемещения на то же расстояние во время обратного перемещения блока, т.e. времени T3 обратного перемещения, определенному соответствующим способом, а также соотношению T1/T3 времени перемещения определенному таким образом; скорости V1 соударения и скорости V3 обратного перемещения, определенных соответствующим способом; или кинетической энергии W1 удара и кинетической энергии W3 обратного перемещения, определенных соответствующим способом, а также соотношению W1/W3 кинетической энергии определенному, как указано. Все указанное должно, в принципе, давать соотношение, которое дает соответствующую информацию, которая в настоящей патентной заявка, называется соотношением Q1/Q3 кинетических переменных. Соотношение Q1/Q3 кинетических переменных, как обнаружено, надежно работает для оценки забивания сваи в грунт, поскольку указывает, насколько велика относительная величина кинетической энергии, используемой для удара, возвращающейся обратно в блок. Если относительная величина является очень высокой (соотношение кинетических переменных является высоким), это означает, что большая часть ударной энергии возвращается в блок и удар не обеспечил погружения (продвижения вперед) сваи в грунт. С другой стороны, если относительная величина является низкой (соотношение кинетических переменных является низким), это означает, что большая часть ударной энергия потрачена на погружение, т.e. продвижение вперед, сваи. Для обеспечения оптимального процесса забивания сваи, соотношение должно иметь заданную величину, поскольку на основе полного времени, требуемого для забивания одной сваи в грунт, легко сделать заключение, что имеется заданная оптимальная величина для соотношения (соотношения кинетических переменных), при которой можно производить удары, для забивания сваи в грунт за самое короткое возможное время. В дополнение к переменным, упомянутым выше, соотношение Q1/Q3 кинетических переменных может также быть создано другими переменными, пропорциональными кинетической энергии удара и обратного перемещения (такими переменными могут, например, являться ускорение блока в направлении ударного перемещения и в направлении обратного перемещения, или равнодействующая сил, действующих на блок во время удара и обратного перемещения).
Способ согласно изобретению имеет преимущество в том, что забивание сваи в грунт свайным копром всегда выполняется самым быстрым возможным путем, даже если оператор свайного копра недостаточно опытен. Кроме того, способ согласно изобретению уменьшает риск забивания сваи с использованием такой большой ударной энергии, при которой свая повреждается.
Краткое описание чертежей
Ниже некоторые предпочтительные варианты осуществления изобретения описаны более подробно со ссылкой на прилагаемые чертежи, на которых показано следующее.
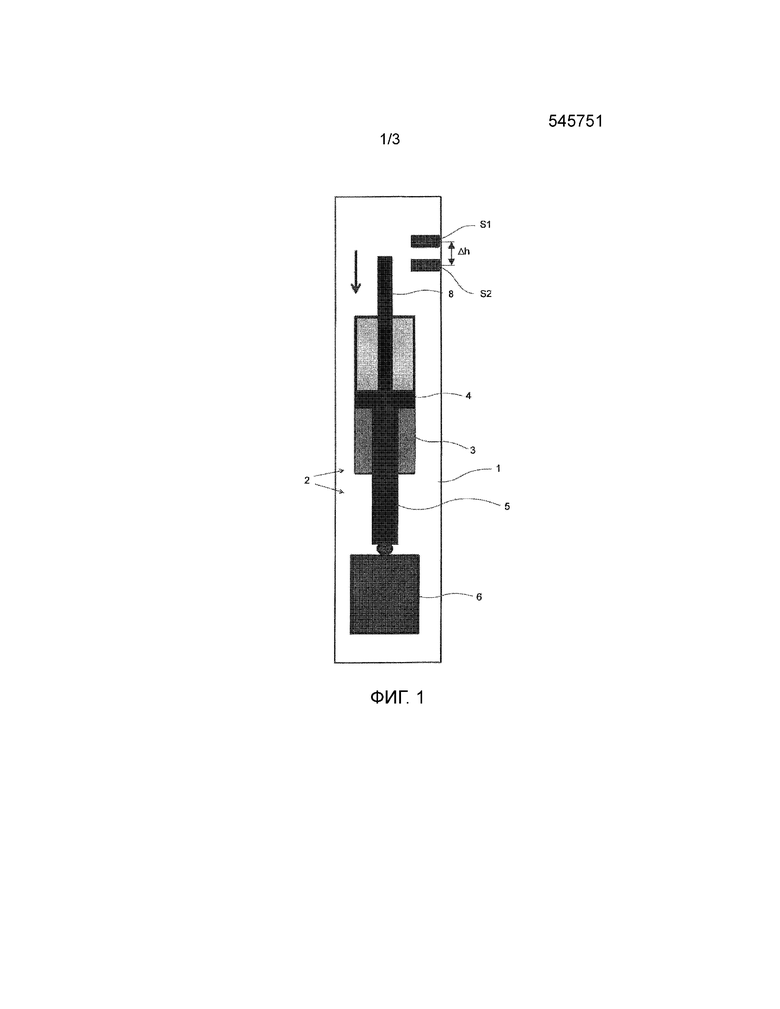
На фиг. 1 показана принципиальная схема механизма для перемещения блока свайного копра для эксплуатации согласно способу изобретения.
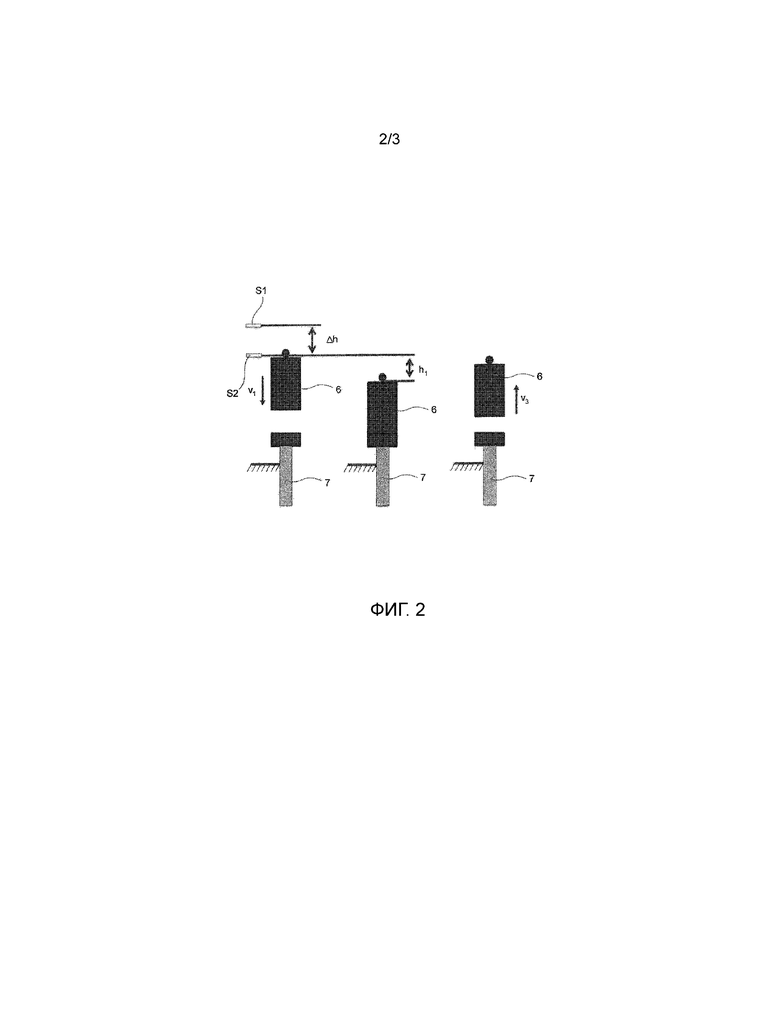
На фиг. 2 показана принципиальная схема фаз перемещений блока во время одного забивающего удара.
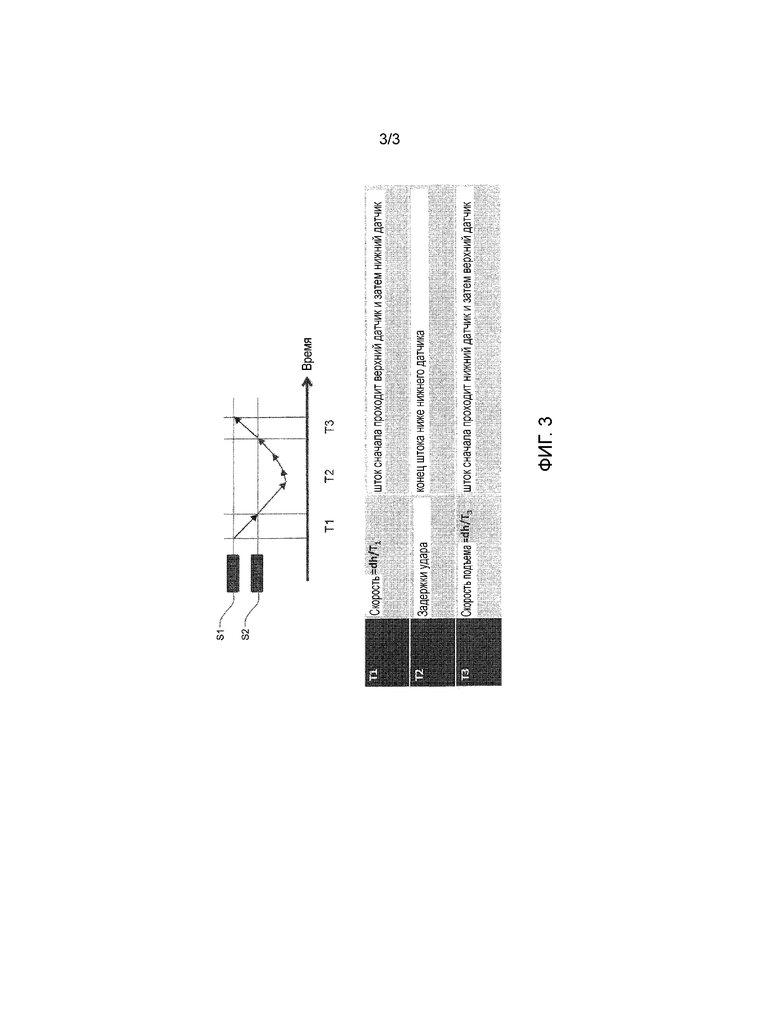
На фиг. 3 показана принципиальная схема с отрезками T1, T2, и T3 времени, измеренными датчиками S1 и S2 положения, закрепленными на бабе свайного копра, способом, показанным на фиг. 1.
Подробное описание некоторых предпочтительных вариантов осуществления изобретения
На фиг. 1 показан принцип работы механизма 2 для перемещения блока 6, перемещающегося внутри имеющей гидропривод бабы 1 свайного копра. Она содержит гидравлический цилиндр 3 проходящий в продольном (вертикальном) направлении бабы 1 копра, и поршень 4, перемещающийся в нем. Шток 5 поршня проходит от поршня 4 до блока 6 под цилиндром. Таким образом, когда поршень 4 перемещается вперед и назад внутри гидравлического цилиндра 3 под действием среды под давлением, подаваемой попеременно к разным сторонам поршня 4, блок 6 под гидравлическим цилиндром 3 перемещается на соответствующее расстояние в вертикальном направлении бабы 1 копра. Данное возвратно-поступательное перемещение используют в забивании сваи 7 при установке бабы 1 копра на сваю 7 таким способом, что когда блок 6 приходит в нижнее положение, он ударяет по верхнему концу сваи 7. В нормальных условиях между концом сваи 7 и блоком 6 размещен амортизатор, для подходящего демпфирования удара, произведенного блоком, так что свая не должна повреждаться ударами, действующими на нее.
В бабе 1 свайного копра, показанной на фиг. 1, длину перемещения поршня 4 можно быть регулировать посредством регулирования общего количества (объема) среды под давлением, подлежащей подаче к ее разным сторонам во время перемещения. В нормальных условиях поршень 4 и блок 6, скрепленный с ним и отнесенный от него на длину штока поршня 5, должен достигать тем большей скорости, чем больше длина перемещения (ход) поршня 4 и при этом блока 6. Вместе с тем, сила, которая сообщает блоку ускорение, в дополнение к потенциальной энергии, обусловленной его массой, должна также влиять на скорость достигаемую блоком. В данном способе, благодаря регулированию скорости поршня 4 и при этом высоты подъема блока 6, а также действию давления в гидравлическом цилиндре, становится возможным изменять скорость v1, достигнутую блоком 6 и, следовательно, кинетическую энергию, генерируемую блоком, т.e. так называемую ударную энергию Wkin.
Ударную энергию Wkin достигаемую, посредством перемещения блока вниз можно вычислить по формуле
 (1)
(1)
где mH=масса блока, v1=мгновенная скорость блока перед соударением.
В варианте осуществления фиг. 1, вверх от поршня проходит измерительный стержень 8, при этом мониторинг перемещения стержня осуществляют верхний датчик S1 положения и нижний датчик S2 положения, расположенные выше цилиндра. Расстояние между верхним датчиком S1 положения и нижним датчиком S2 положения составляет Δh, как показано на фиг. 2. Датчики S1 и S2 положения соединены в свайном копре с блоком управления, выполненным с возможностью применения датчиков S1 и S2 положения для измерения времени T1 (время удара) снимаемого с помощью измерительного стержня 8, когда конец измерительного стержня 8 проходит первый верхний датчик S1 положения и затем нижний датчик положения, когда поршень перемещается вниз. Соответственно, время T2 (время задержки удара) является временем, снимаемым с помощью измерительного стержня 8, когда он находится под нижним датчиком S2 положения во время удара, и время T3 является временем (время обратного перемещения), снимаемым с помощью измерительного стержня 8 когда он первый раз прошел датчик S2 положения и затем датчик S1 положения. Время T1 удара, время T2 задержки удара и время T3 обратного перемещения показаны на принципиальной схеме фиг. 3. Расстояние h1 является расстоянием перемещения измерительного стержня 8 после прохождения им нижнего датчика S2 положения перед ударом блока 6 по концу сваи 7. Бабу копра можно также реализовать в таком виде, где никакой измерительный стержень не проходит от поршня над цилиндр, но мониторинг перемещения поршня и/или блок осуществляется измерительным устройством, реализованном в другом виде. Например, когда применяются датчики положения, их можно выполнить с возможностью измерения положения блока напрямую или, дополнительно, положения другой точки, соединенной с блоком и движущейся с блоком и/или с поршнем.
На основе времени T1 удара и времени T3 обратного перемещения можно определить скорость V1 ударного перемещения и скорость V3 обратного перемещения, и соответственно, на основе скорости V1 ударного перемещения, скорости V3 обратного перемещения и массы mH блока, определить кинетическую энергию W1 удара и кинетическую энергию W3 обратного перемещения. Таким образом, все кинетические переменные T1, V1 и W1 ударного перемещения пропорциональны кинетической энергии блока во время удара (то есть, они являются кинетическими переменными Q1 ударного перемещения по настоящей заявке), и все кинетические переменные T3, V3 и W3 обратного перемещения пропорциональны кинетической энергии во время обратного перемещения (то есть, они являются кинетическими переменными Q3 обратного перемещения по настоящей заявке). Скорость V1 ударного перемещения можно определить на основе времени T1 удара, делением расстояния Δh на время T1 удара, и скорость V2 обратного перемещения на основе времени T3 обратного перемещения делением расстояния Δh на время T3 обратного перемещения. Если скорость V1 должна соответствовать фактической скорости v1 непосредственно перед ударом блока о конец сваи, скорость ударного перемещения должна быть измерена посредством измерения мгновенной скорости v1 непосредственно перед ударом и мгновенной скорость v3 сразу после удара. Другой альтернативой является определение скоростей v1 и v3 на основе измеренных скоростей V1 и V3, зная, что скорость v1 пропорциональна скорости V1 и скорость v3 пропорциональна скорости V3. Для измерения скоростей также можно применять другие способы измерения вместо измерения датчиками S1 и S2 положения. Измерение может быть выполнено, например, датчиком, закрепленным на боковой стороне блока и измеряющим напрямую скорость блока или время (T1 и T3), которое занимает перемещение на данное расстояние Δh во время ударного и обратного перемещения. Дополнительно, скорость или время можно измерить, применяя, например, способ оптического измерения позиционирования, скорости или способ ультразвукового измерения.
Свайный копер, включающий в себя бабу копра, показанный на фиг. 1 содержит программируемый блок управления и гидравлическую систему, управляемую посредством блока управления. С помощью гидравлической системы, управляемой посредством блока управления, среда под давлением (например, масло гидросистемы) может подаваться в гидравлический цилиндр в бабе свайного копра так, что поршень 4, перемещающий блок 6, может перемещаться на требуемую длину перемещения вперед и назад с требуемой скоростью в гидравлическом цилиндре. В общем, перемещение вниз блока 6 называется ударным перемещением, и перемещение вверх называется обратным перемещением. Оператор свайного копра может регулировать требуемую длину перемещения и/или скорость вручную, или регулировка может выполняться автоматически, при этом блок управления выбирает подходящую длину перемещения, конечную скорость ударного перемещения и/или силу для сообщения ускорения блоку (давление, действующее в гидравлическом цилиндре) автоматически на основе требуемой ударной энергии Wkin или дополнительно с помощью программного обеспечения, загруженного /сохраненного в блоке управления. Датчики S1 и S2 положения соединены с блоком управления, при этом блок управления способен регулировать скорость и/или длину перемещения поршня на основе данных измерений, полученных с датчиков S1 и S2 положения.
В имеющей гидропривод бабе 1 свайного копра, среда под давлением подается над поршнем 4 во время рабочего перемещения, и среда под давлением под поршнем возвращается в бак среды под давлением в системе (то есть, падение блока вниз ускоряется). Соответственно, во время обратного перемещения, среда под давлением подается под поршень 4 и среда под давлением над поршнем 4 возвращается в бак (то есть, блок поднимается). Таким образом блок 6 может перемещаться вперед и назад внутри бабы 1 свайного копра в вертикальном направлении бабы 1 копра во время забивания свай, при этом скорость больше во время рабочего перемещения, чем во время обратного перемещения. Таким образом, разность между скоростями получается вследствие того факта, что изменение (уменьшение) в потенциальной энергии, обусловленной массой mH блока 6 выполняет работу, результатом которой является увеличение скорости блока 6 при его перемещении вниз, и соответственно, результатом аналогичного изменения (увеличения) в потенциальной энергии является замедление перемещения блока 6 вверх.
На временном отрезке T2, показанном на фиг. 3, то есть, во время так называемой задержки удара на сваю 7 действует не только ударная энергия, но также изменение в потенциальной энергии создаваемые перемещением вниз блока 6, размещенного против сваи 7, и самой сваи 7. Часть данного перемещения вниз обусловлена упругой деформацией сваи (в нормальных условиях, около 1/3 массы вовлечено в данную часть изменения в потенциальной энергии), и другая часть погружением (т.e. продвижением вперед) сваи в грунт. Таким образом, на данной стадии изменение в потенциальной энергии производит работу по перемещению сваи 7 вниз, в дополнение к ударной энергии Wkin, на временном отрезке T2, показанном на фиг. 3.
Во время задержки удара (т.e. на временном отрезке T2, показанном на фиг. 3) полную энергию системы, образованной сваей и блоком (когда свая продвигается вперед) можно вычислить по формуле:
 (2)
(2)
где Wkin=ударная энергия, Wjou=энергия упругой деформации, связываемая в объеме сваи, Wpotδ1=изменение в потенциальной энергии, обусловленное упругой деформацией сваи, Wpotδ2=изменение в потенциальной энергии, обусловленное продвижение вперед сваи.
Упругую энергию Wjou, связываемую в объеме сваи 7, можно вычислить по формуле:
 (3)
(3)
где F=несущая способность сваи,
δ1=смещение (упругая деформация) верхнего конца сваи.
Изменение в потенциальной энергии, обусловленное упругой деформацией сваи 7, можно вычислить по формуле:
 (4)
(4)
где mP=масса сваи, g=ускорение свободного падения.
Изменение в потенциальной энергии, обусловленное продвижением вперед сваи 7, можно вычислить по формуле:
 (5)
(5)
где δ2=продвижение вперед сваи.
Когда блок 6 и свая 7 упираются друг в друга во время удара, часть ударной энергии Wkin и потенциальная энергия Wpotδ1 и Wpotδ2 всегда связана с самой сваей 7 в виде упругой энергии Wjou сохраняемой в ней, поскольку свая 7 должна упруго деформироваться. Остальное расходуется на обеспечение продвижения δ2 вперед сваи 7 и в потерях на трение. Если ударная энергия Wkin слишком мала, полная энергия, передаваемая на сваю, не способна воздействовать на сваю 7 силой, заставляющей сваю 7 продвинуться вперед, поскольку не способна создать силу F, достаточную для обеспечения свае 7 продвижения вперед, то есть, силу соответствующую по меньшей мере несущей способности сваи 7 в данный момент. В такой ситуации большая часть ударной энергии Wkin и потенциальной энергии (из которой только Wpotδ1 включена в состав) связана со сваей в виде упругой энергии Wjou (и небольшая оставшаяся часть должна превращаться в тепло в виде потерь на трение). Таким образом, удар со слишком малой ударной энергией Wkin не может заставить сваю 7 продвинуться вперед, но большая часть упругой энергии Wjou, связанной со сваей 7 должна возвращаться в блок 6, который должен отскакивать вверх (то есть, в направлении обратного перемещения) под действием данной энергии. Следовательно, упругая энергия Wjou связанная со сваей 7, должна превращаться обратно в кинетическую энергию и потенциальную энергию (что включает в себя подъем конца сваи, поскольку упругая деформация должна создавать реверс, и перемещение вверх блока).
Если удар такой сильный, что свая 7 должна продвигаться вперед, часть упругой энергии Wjou должна действовать, продвигая вперед сваю 7, а другая часть должна возвращаться, как кинетическая энергия в блок 6. На практикe, данное показано, например, во временных отрезках T1 и T3, измеренных с помощью датчиков и S1 и S2 положения, таким образом, что в ударе, который не приводит к продвижению вперед сваи 7, время T3 является коротким в сравнении с временем T1. Если, с другой стороны, свая 7 продвигается вперед, меньшая часть упругой энергии, связанной со сваей 7 должна быть возвращена, в результате действия удара, обратно в блок, как кинетическая энергия, перемещающая его вверх. В результате, время T3 должно становиться больше относительно времени T1. С использованием данной информации становится возможным на основе временных отрезков T1 и T3, измеренных датчиками S1 и S2 положения, определить расстояние, на которое свая 7 должна продвигаться вперед в результате действия каждого удара, и при этом использовать временные отрезки T1 и T3 для оценки забивания сваи в описанным выше способом.
Как упомянуто выше, на практике забивания свай целью является забить сваю 7 до требуемой глубины в грунт как можно быстрее. Для управления указанным следует определить полное время ttot, требуемое для забивания сваи 7 в грунт. Полное время ttot, требуемое для забивания сваи 7 в грунт равно сумме временных отрезков ti, требуемых для каждого одного удара. Следовательно, полное время ttot, требуемое для забивания сваи 7, можно вычислить по формуле:
 (6),
(6),
где ttot=полное время, требуемое для забивания сваи, ti=время, требуемое для одного удара, n=общее число ударов.
Если одинаковое время t берется для каждого удара, полное время, требуемое для забивания сваи равно числу n требуемых ударов, умноженных на время, требуемое для одного удара; то есть:
ttot=n * t (7)
На практике указанное может иметь место в случае, если грунт является таким, что ударную энергию Wkin можно отрегулировать сохраняющей постоянную величину. Вместе с тем, поскольку несущая способность сваи 7 в нормальных условиях увеличивается по ходу забивания, приложение постоянной ударной энергии должно приводить к ситуации, в которой свая 7 забивается вначале с применением избыточной ударной энергии и в конце с применением слишком малой ударной энергии.
Для забивания сваи 7 в грунт как можно быстрее, целью является минимизация полного времени ttot, требуемого для забивания сваи. Действительно, полное время ttot достигает минимума, когда сумма временных отрезков, взятых для одиночных ударов, уменьшена, насколько возможно. Если ударная энергия Wkin является не постоянной, имеются несколько альтернативных решений указанного, поскольку продолжительности ti одиночных ударов могут отличаться для двух отличающихся способов забивания сваи в грунт, даже если конечный результат дает одинаковое полное время ttot, требуемое для забивания сваи 7.
Концептуальным условием для забивания сваи 7 (без повреждений) является ударная энергия Wkin, генерирующая силу, действующую на сваю 7 в направлении грунта, которая больше несущей способности F сваи 7, и с другой стороны меньше величины, которая обуславливает такой сильный растягивающий импульс на свае 7, что свая должна повреждаться. При забивании свай в нормальный для забивания свай грунт, никакая свая не должна, забиваться в грунт одним ударом. Кроме того, такой удар требует так много ударной энергия что при обычном соотношении массы блока с массой сваи (например, mH/mP=1,69) указанное приведет к такому длительному удару, что полное время ttot будет значительно больше, чем при реализации нескольких ударов с оптимальной ударной энергией. Такой свайный копер практически неосуществим. Таким образом, оптимальный способ забивания сваи, дающий возможное более короткое, полное время ttot, всегда находится в некоторых пределах между данными двумя предельными случаями.
В испытаниях, проведенных со свайными копрами, аналогичными показанным на фиг. 1, обнаружено, что при некотором соотношении между временем T1, измеренным в соединении с ударом, и временем T3, измеренным во время обратного перемещения (то есть, при данном соотношении T1/T3 времени перемещения в данном варианте применения), можно достичь самого короткого возможного полного времени ttot, требуемого для забивания сваи в грунт. Таким образом, посредством определения такого заданного (оптимального) соотношения T1/T3tav времени перемещения можно оптимизировать время забивания сваи 7 в грунт так, что сваю 7 можно забить в как можно быстрее. Определение можно выполнить опытным путем и/или посредством вычисления, зная соотношение временных отрезков T1, T2 и T3 с реальной скоростью блока 6 и при этом с получаемой ударной энергией. В принципе, вместо времени T1 удара и времени T3 обратного перемещения также можно использовать скорости, соответствующие временным отрезкам T1 и T3, то есть, скорость V1 соударения и скорость обратного перемещения V3 и соотношение V1/V3 скоростей, получаемое при этом, для определения соответствующего соотношения. Дополнительно, то же соотношение можно получить посредством определения, по скорости V1 соударения, кинетической энергия W1 удара (которая, здесь пропорциональна ударной энергии Wkin) и кинетической энергии W3 обратного перемещения и, на основе указанного, определенного соотношения W1/W3 кинетической энергии.
Для достижения оптимального процесса забивания сваи, следует регулировать ударную энергию Wkin так, чтобы выбранное соотношение Q1/Q3 кинетических переменных, например, соотношение T1/T3 времени перемещения, соотношение V1/V3 скорости или соотношение W1/W3 кинетической энергия, было возможно более близким к заданному значению указанного во время всего процесса забивания сваи. В варианте осуществления фиг. 1 (в котором измеряют временные отрезки T1, T2, T3 перемещения), заданное значение является заданным соотношение T1/T3tav времени перемещения. В результате, в свайном копре фиг. 1 ударная энергия Wkin следующего удара всегда регулируется на основе фактического (измеренного) соотношения T1/T3 времени перемещения предыдущего удара. Указанное можно выполнить, например, посредством сравнения соотношения T1/T3 измеренного времени перемещения с заданным значением T1/T3tav для соотношения времени перемещения, при этом свая 7 может быть забита в грунт так быстро, как только возможно. Такое регулирование ударной энергии Wkin можно реализовать с помощью программного обеспечения в блоке управления свайного копра. Указанное может быть выполнено, например, таким способом, в котором оператор свайного копра выбирает "автоматически оптимизированный процесс забивания сваи " из меню блока управления, и вводит данные по свае, подлежащей забиванию в грунт, а также по свойствам/типу грунта. При этом блок управления должен находить заданное значение T1/T3tav для соотношения времени перемещения, которое является наиболее подходящим для сваи и грунта данного типа, при котором процесс забивания сваи реализуется оптимальным путем. Таким образом, соответствующий способ оптимизации забивки свай может также быть основан на соотношениях Q1/Q3 кинетических переменных, полученных посредством других кинетических переменных Q1 удара и кинетических переменных Q3 обратного перемещения (где кинетическая переменная удара должна быть пропорциональна кинетической энергии блока во время удара, и кинетическая переменная Q3 обратного перемещения должна быть пропорциональна кинетической энергии блока во время обратного перемещения), и их заданного значения Q1/Q3tav, таких как соотношение V1/V3 скорости и его заданное значение V1/V3tav, или соотношение W1/W3 кинетической энергии и его заданное значение W1/W3tav.
В варианте измерительного устройства, показанного на фиг. 1, блок управления свайного копра, с которым датчики S1 и S2 положения соединены, определяет величины соотношения T1/T3 времени перемещения по временным отрезкам T1 и T3 перемещения во время процесса забивания сваи, и сравнивает их с заданным значением T1/T3tav. Если соотношение T1/T3 времени перемещения предыдущего удара меньше заданного значения T1/T3tav, блок управления должен увеличить ударную энергию, и если больше, блок управления должен уменьшить ударную энергию. Данное управление является автоматическим, так что реальное соотношение T1/T3 времени перемещения, определенное на основе временных отрезков T1 и T3 перемещения непрерывно меняется в направлении к соотношению T1/T3tav времени перемещения, которое известно, как приводящее к минимальному полному времени ttot для забивания сваи 7. На практике, вместе с тем, несущая способность сваи 7 все время меняется, так что должен осуществляться непрерывный контроль с тем, чтобы свая 7 забивалась в оптимальном режиме, даже если теоретическая оптимальная ситуация не достигнута. Способ работы, соответствующий указанному, можно также с равным успехом реализовать с помощью соотношений Q1/Q3 других кинетических переменных, таких как соотношение V1/V3 скорости или соотношение W1/W3 кинетической энергии.
Альтернативно, автоматическое управление в блоке управления свайного копра можно реализовать таком виде, что по соотношению Q1/Q3 кинетических переменных, измеренному после каждого удара, такому как соотношение T1/T3 времени перемещения, соотношение V1/V3 скорости или соотношение W1/W3 кинетической энергии, и их заданным значениям T1/T3tav, V1/V3tav, W1/W3tav, вычисляют отклонение ΔT1/T3 в соотношении времени перемещения, отклонение ΔV1/V3 в соотношении скорости или отклонение ΔW1/W3 в соотношении кинетической энергии, вычитая измеренную величину из соответствующего заданного значения. Блок управления должен затем предпринять корректировку ударной энергии с тем, чтобы в следующем ударе отклонение от заданного значения уменьшилось на столько, на сколько возможно.
Наиболее подходящее заданное соотношение Q1/Q3tav кинетических переменных, такое как заданное соотношение T1/T3tav времени перемещения, заданное соотношение V1/V3tav скорости, или заданное соотношение W1/W3tav кинетической энергии может быть определено для каждой сваи, а также для каждого грунта отличающегося типа. Также можно применять заданные значения, получая отличающиеся профили продвижения вперед. Указанное также может отличаться для свай и грунта отличающихся типов. В некоторых случаях, заданное соотношение Q1/Q3tav кинетических переменных, такое, например, как заданное соотношение T1/T3tav времени перемещения, заданное соотношение V1/V3tav скорости, или заданное соотношение W1/W3tav кинетической энергии может варьироваться отличающимися способами во время процесса забивания сваи.
Местоположение датчиков S1 и S2 положения или других датчиков, применяемых для измерения перемещения блока относительно местоположения блока, перемещающегося в бабе свайного копра, может варьироваться в отличающихся вариантах осуществления способа согласно изобретению. Например, в варианте осуществления фиг. 1-3, соотношение временных отрезков T1, T2 и T3 с фактической скоростью блока 6 может варьироваться в отличающихся вариантах осуществления. Соотношение T1/T3 времени перемещения является соотношением, указывающим соотношение временных отрезков, взятых для перемещения блока на определенное расстояние Δh во время удара и обратного перемещения. Таким образом, величина соотношения времени перемещения зависит от продвижения вперед сваи во время одного удара. Как упомянуто выше, оно не должно быть ограничено только соотношением временных отрезков перемещения, поскольку аналогичная информация (соотношение), используемое в способе согласно изобретению, может также быть получено посредством анализа других переменных, пропорциональных кинетической энергии удара и обратного перемещения, таких как соотношения между скоростями или кинетической энергией удара и обратного перемещения. Данные переменные можно измерять, применяя разнообразные измерительные устройства, выходящие за рамки представленного выше примера варианта осуществления. В принципе возможно применение, например, любых измерительных приборов для измерения мгновенной или средней скорости блока, или измерительного прибора для измерения другой подходящей переменной, пропорциональной кинетической энергии, обеспечивающего результаты измерений, которые можно использовать для определения соотношения, пропорционального кинетической энергии удара и обратного перемещения, и для расчета продвижения вперед, обеспеченного одним ударом по свае относительно ударов, обеспечивающих самое короткое возможное полное время удара, и, на основе указанного, для регулирования ударной энергии Wkin для оптимального процесса забивания сваи.
Способ согласно изобретению, не ограничен описанными примерами вариантов осуществления но, может быть реализован отличающимися путями в объеме прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛУБОКОВОДНЫЙ СВАЕБОЙНЫЙ КОПЕР | 2009 |
|
RU2498016C2 |
| УСТРОЙСТВО И СПОСОБ УСТАНОВКИ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2005 |
|
RU2395641C2 |
| МОЛОТ | 2000 |
|
RU2186175C2 |
| СВАЙНОЙ КОПР | 1934 |
|
SU41922A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| ГИДРОМОЛОТ | 1996 |
|
RU2109106C1 |
| ПАТЕНТНО-ТЕХНИЧЕСНДЛ | 1972 |
|
SU326290A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРЕМЕНЕМ УДАРА ПРИ ДЕФОРМИРОВАНИИ ЗАГОТОВОК НА МОЛОТЕ | 2008 |
|
RU2386512C1 |
| СТРОИТЕЛЬНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 2013 |
|
RU2536595C2 |
| Сваебойный гидровинтовой молот | 1978 |
|
SU753990A1 |
Изобретение относится к строительству, а именно способу оптимизации забивания сваи. Способ оптимизации забивания сваи, в котором осуществляют забивание сваи в грунт свайным копром, содержащим бабу копра, подлежащую установке в упор на сваю, и блок, перемещающийся вперед и назад в ней. Перемещение блока, применяемого для забивания сваи, в направлении к концу сваи с заданной ударной энергией (Wkin). Определение величины кинетической переменной (Q1) удара, пропорциональной кинетической энергии блока, применяемого для забивания сваи, когда блок перемещается к свае в направлении забивания сваи. Определение величины кинетической переменной (Q3) обратного перемещения, пропорциональной кинетической энергии блока, когда блок возвращается после удара по свае, в направлении противоположном направлению забивания сваи. Вычисление соотношения (Q1/Q3) кинетических переменных с помощью определенных кинетической переменной (Q1) удара и кинетической переменной (Q3) обратного перемещения. Сравнение полученного соотношения (Q1/Q3) кинетических переменных с заданным целевым значением (Q1/Q3tav) для соотношения (Q1/Q3) кинетических переменных, с получением самого короткого возможного полного времени (ttot) забивания для сваи. Регулирование ударной энергии (Wkin) следующего удара так, чтобы соотношение (Q1/Q3) кинетических переменных, определенное с помощью кинетической переменной (Q1) удара и кинетической переменной (Q3) обратного перемещения следующего удара, изменилось, приблизившись к заданному значению (Q1/Q3tav). Технический результат состоит в обеспечении требуемой несущей способности при погружении сваи, снижении материалоемкости и трудоемкости работ. 10 з.п. ф-лы, 3 ил.
1. Способ оптимизации забивания сваи (7), в котором осуществляют:
- забивание сваи (7) в грунт свайным копром, содержащим бабу (1) копра, подлежащую установке в упор на сваю (7), и блок (6), перемещающийся вперед и назад в ней;
- перемещение блока (6), применяемого для забивания сваи (7), в направлении к концу сваи (7) с заданной ударной энергией (Wkin);
- определение величины кинетической переменной (Q1) удара, пропорциональной кинетической энергии блока (6), применяемого для забивания сваи, когда блок (6) перемещается к свае (7) в направлении забивания сваи;
- определение величины кинетической переменной (Q3) обратного перемещения, пропорциональной кинетической энергии блока (6), когда блок (6) возвращается после удара по свае (7), в направлении, противоположном направлению забивания сваи;
- вычисление соотношения (Q1/Q3) кинетических переменных с помощью определенных кинетической переменной (Q1) удара и кинетической переменной (Q3) обратного перемещения;
- сравнение полученного соотношения (Q1/Q3) кинетических переменных с заданным целевым значением (Q1/Q3tav) для соотношения (Q1/Q3) кинетических переменных с получением самого короткого возможного полного времени (ttot) забивания для сваи (7);
- регулирование ударной энергии (Wkin) следующего удара так, чтобы соотношение (Q1/Q3) кинетических переменных, определенное с помощью кинетической переменной (Q1) удара и кинетической переменной (Q3) обратного перемещения следующего удара, изменилось, приблизившись к заданному значению (Q1/Q3tav).
2. Способ по п. 1, в котором ударную энергию (Wkin) следующего удара определяют посредством использования ударной энергии (Wkin), использованной в предыдущих ударах, и реального соотношения (Q1/Q3) кинетических переменных, полученного при этом.
3. Способ по п. 2, в котором величину ударной энергии (Wkin) увеличивают, если реальное соотношение (Q1/Q3) переменных предыдущего удара выше заданного соотношения (Q1/Q3tav) ударных переменных.
4. Способ по п. 2 или 3, в котором величину ударной энергии (Wkin) уменьшают, если реальное соотношение (Q1/Q3) переменных предыдущего удара ниже заданного соотношения (Q1/Q3tav) ударных переменных.
5. Способ по п. 1, в котором разность соотношений кинетических переменных, т.e. отклонение (ΔQ1/Q3) в соотношении кинетических переменных, вычисляют по соотношению (Q1/Q3) кинетических переменных и заданному соотношению (Q1/Q3tav) кинетических переменных.
6. Способ по п. 5, в котором отклонение (ΔQ1/Q3) в соотношении кинетических переменных минимизируют посредством регулирования ударной энергии (Wkin) блока (6).
7. Способ по любому из пп. 1-6, в котором перед началом процесса забивания сваи заданное соотношение (Q1/Q3tav) переменных определяют вычислением на основе площади сечения, длины и типа сваи и/или свойств грунта посредством такой оптимизации ударной энергии (Wkin), чтобы при ударах, производящих равное продвижение вперед, свая (7) могла быть забита до определенной глубины за возможно более короткое время (ttot).
8. Способ по любому из пп. 1-6, в котором заданное соотношение (Q1/Q3tav) кинетических переменных определяют так, чтобы с помощью ударов, производящих отличающееся продвижение вперед, свая (7) могла быть забита до определенной глубины за возможно более короткое время (ttot).
9. Способ по любому из пп. 1-8, в котором используют время (T1) удара как кинетическую переменную (Q1) ударного перемещения и время (T3) обратного перемещения как кинетическую переменную (Q3) обратного перемещения, а также соотношение (T1/T3) времени перемещения, определенное на их основе.
10. Способ по любому из пп. 1-8, в котором используют скорость (V1) соударения как кинетическую переменную (Q1) ударного перемещения и скорость обратного перемещения (V3) как кинетическую переменную (Q3) обратного перемещения, а также соотношение (V1/V3) скоростей, определенное на их основе.
11. Способ по любому из пп. 1-8, в котором используют кинетическую энергию (W1) ударного перемещения как кинетическую переменную (Q1) ударного перемещения и кинетическую энергию (V3) обратного перемещения как кинетическую переменную (Q3) обратного перемещения, а также соотношение (V1/V3) скоростей, определенное на их основе.
| Способ определения толщины покрытия на подложке | 1981 |
|
SU1021995A1 |
| УСТРОЙСТВО И СПОСОБ УСТАНОВКИ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2005 |
|
RU2395641C2 |
| Устройство управления свайным вибропогружателем | 1986 |
|
SU1432139A1 |
| Система управления гидропневматическим молотом | 1987 |
|
SU1532174A1 |
| Устройство для автоматического регулирования режима работы машин виброударного действия | 1978 |
|
SU770807A1 |
| УСТРОЙСТВО ДЛЯ ПРОТОЧНОГО ХРОМИРОВАНИЯ | 1999 |
|
RU2175033C2 |

