(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ
I
ИзОбретение отгнооится к обла€Т и весоязмерятельной техники, в частности, к устройствам для взвешиважия иродуктов, например, -рыбы «а -судах в услов иях непокойного моря.5
Известно устройство для 1взвешиван,ия (продуктов в условиях мор,я, 1содержащее датчики образцовой и измеряемой массы, подключенные ,к делителю .сигналов 1.
Это устройство ие обеспечивает требуе- 10 мой точности.
Бл;ижай|шим по тех,Еичеокой сущности является устройство для измерения iMaccbi, содержащее устадовленные на одной (вертикальной оси тензодатч-ик образцовой мае- 15 сы и тензодатчик измеряемой массы, подключенный к блоку питания 2.
Одна,ко отмечается неудовлетворительная точность измерения .массы, поскольку в результат измерения вносятся лолр-ешнос- 20 ти П|р|еобразовани.я Сигналов датчиков в каждом их зсидителе н делителе.
Цель изобретения - повышение точности 1ИЗМерения в условиях переменных ускорений и качки.,25
Достигается поставленная цель тем, что в згстройство введены уоилитель «еко мпенсации, уоилитель мощности, электродвигатель и реохорд, причем вход усилителя мощности подключен к реохорду, а выход 30
соединен с тензодатчшшм образцовой массы, при этом выходы тензодатчика Образцовой массы и тензодатчика измеряемой массы подключены встречно к входу усилителя некомпеНСации.
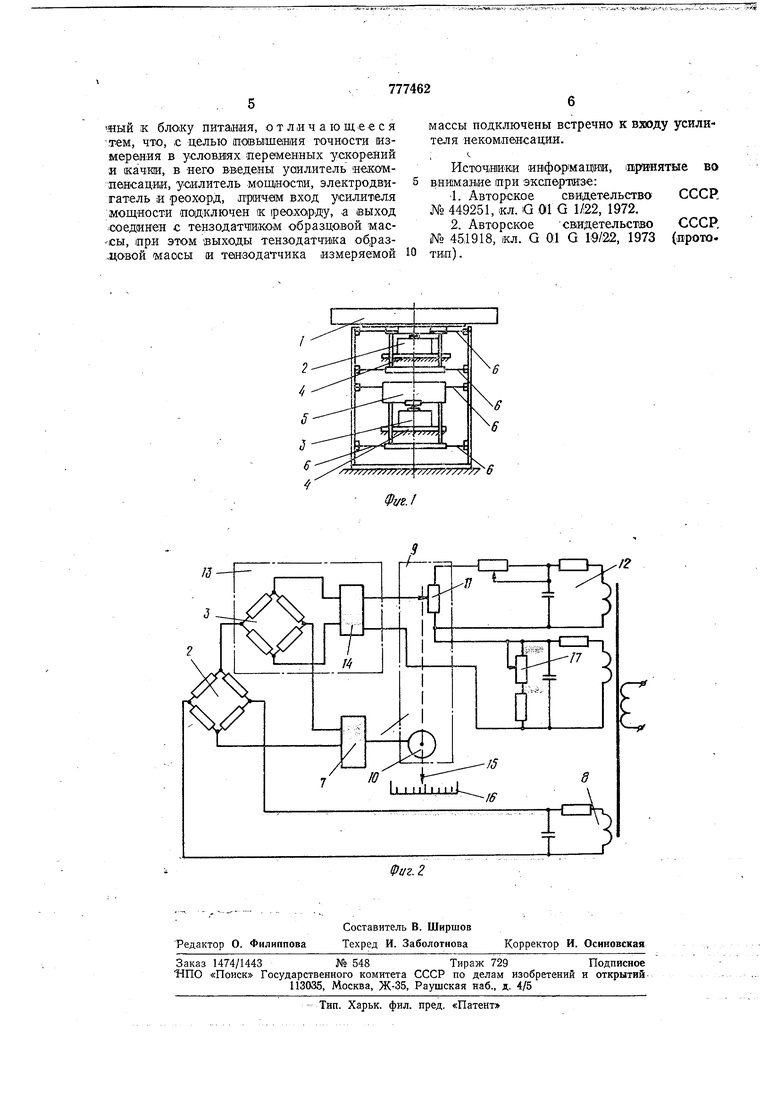
,На фиг. 1 изображено устройство для измерения массы, Общий вид; на .фиг. 2 - его электрическая схема.
Устройство состоит из грузоприемной платформы 1, тензодатчиков 2 vi 3, установленных иа основании 4. На танзодатчик 2 отирается платформа 1, на тензодатчик «3 зстановлен груз массы 5. Грузоприемная платформа 1 и груз 5 зафиксированы струнками 6. Выходы тензодатчиков 2 и 5 включены встреЧ|НО по выходному -сигналу ко входу усилителя некомпенсации 7. Вход тензодатчика 2 подключен к блоку питания 5 (фиг. 2). К выходу усилителя 7 подключен интегратор 9, состоящий из двигателя 10 и механически связанного с ним реохорда 11, который своим входам подключен к блоку питания 12, а выходом- -к обратному преобразователю 13, состоящему нз усилителя мощности М и тензодатчика 3 образцовой массы 5. С движ-ком реохорда 11 жестко связан указатель 15, который перемещается вдоль шкалы 16, проградуироэанной в единицах .массы. Нулевое положение указателя 15 устанавливается с помощью потенциометра 17. Устройство работает. .следующим обраSOiM. , Изменение соп-ротивлешш плечей моста тензодатч|Ико:В 2 и 5 с учетом динамики выражается следующим образом: ± a(i) cos «(/) Д/, К,,т,,§ ± а(() cos a(t), где гпэ - обраэдовая масса; т а - шзмеряамая масса; g - з скорение свободного падения; a(t) - изменение ускорения при динамических воздействиях; a(f) - угол наклона устройства нри «ачке судна; , , ; ARa - изменение -сопротивления илеча тензомоста тензодатчика 3 образцовой массы; - изменение сопротивления плеча тензомоста тензодатчгака 2 «змеряэмой массы; Кэ, К - коэф;ф1ициенты преобразовадия тензодатчиков. При отсутствии нзмеряемой массы уклеатель 15 устанавливается против нулевой отметки шкалы 16 с помощью лотевциометра :/7.ПРИ .наложении груза «а грузоприемную платформу 1 тензодатчик 2 деформируется и ,на его выходе поя1вится .напряжение разбаланса и,„ KOTOipoe приложится ко .входу зсилителя -некомпенсации 7 и и t-n - п где Ug - .напряжение питания тензодатчека 2; Я - оопр.от1ивление плеча тензомоста датчика 2. На.пряженне U,, усилится усил.ителем некомденсащии 7 и дйигатель 10 начнет вращаться, .перемещая -движок рео.хорда II и указатель 15. При этом .напряжение, снимаемое с реохор.да //, .преОбразовы.вается усилителем м.ощносТ1И М и питает датчик 3. Поскольку датчик 3 нагружен образ.цовой массой, его тензомо.ст раз балансирован и тензодатчик 3 вырабатьтвает ятомпенсирующее движение 17э, включенное встречно напряжению датчика 2. Перемещение двилжа 1реохорда 11 « ука.зателя 15 происходит до тех пор, .пока напряжение 6э не ско;мпенс(ирует напряжение U .и на выходе з силителя 7 .не уста.йовится нулевой потенциал. Напряжение на (выходе тензодатчика 3 Шределится из выражения ,; г/ , где UK - -напряжение питания тензодатч1ика образцовой массы - определяется из выражения и,,, где t/n - напряжение питания потенциометра /7; Р - |угол ловорота движа а .реохорда .//; коэффйЦтИвнт прбОбразован-иЯ усилителя 1МОЩНО.СТИ 14. I Поскольку в «о.н.це цикла измерения лапряж-ение на выходе зс.илителя некомпенсации 7 равно О, то и, (/„, и -В-/ и . ум -// ((/) t/o-- , откуда Поскольку и о, f/и, К, Kg - вел.ич.ины постоянные, последнее выражение мож.но представить в виде: Р ст„, и,, ТаМим образом, угол .поворота движка реохорда 11, а следовательно,,и жестко соединенного с .ним указателя -15 пр-опорадионален величине измеряемой массы. Таким образом, устройство .реал.изует операцию деления выходных сигналов тензодатчика 2, 3 и устраняет влияние динамического воздействия от ускорения и наклонов судна .П|р:и кач.ке ,в мо.ре. Точность устройства зависит йт лянейиости реохорда //, усилителя мощности 14 и стабильности порога чувств1итель;Еости усилителя .некомпенсацни .7. -В устройстве Отсутствуют специальный бло.к деления. Операция деления оаущ.ест1вл.яется за счет включения усилителя мощпосии 13 и датчика 3 в .качеств.е обратной связи после лнтегрИ|рующег.о звена в виде двигателя 10 н 1реохо.рда 11. . Формула .и 3 о б р е т е .н ,и я Устройство .для измерения массы, содержащее уста.новлен.ны.е .на одной верт1и.каль.ной оси тензодатчик образцовой .масбы .и ТеНЗОЛЯТЧИК И.ЧМРПЯРМПЙ мяпгы плпк-итпирц
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1983 |
|
SU1177679A1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1984 |
|
SU1224596A1 |
| Автоматический компенсатор | 1980 |
|
SU949511A1 |
| МНОГОТОЧЕЧНОЕ ЧАСТОТНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ, МАССЫ И ДЕФОРМАЦИЙ | 2015 |
|
RU2584341C1 |
| Весоизмерительное устройство | 1977 |
|
SU664045A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Устройство для измерения массы | 1986 |
|
SU1435949A1 |
| Конвейерные весы | 1980 |
|
SU892223A2 |
| Весоизмерительное устройство | 1986 |
|
SU1314233A1 |
