Изобретение относится к области весоизмерительной техники.
Известны большегрузные стационарные весы, содержащие грузоприемную платформу, систему тяг и рычагов 1 ,
Такие весы имеют недостаточную точность из-за необходимости использования грузов большой массы и рейтеров .
Известны также весы, содержащие измерительное коромысло и механизм предварительного взвещивания 2.
Эти весы являются аналитическими.
Ближайшими по технической сущности к изобретению являютсябольшегрузные стационарные весы, содержащие грузоприемную платформу, связанную системой рычагов и тяг с измерите.пьной системой, подключенной к отсчетному прибору 3,
Недостатком прототипа является неудовлетворительная точность, обусловленная использованием в этих весах коромысла, взаимодействующего через систему реек и шестеренок с циферблатным указателем, что создает большое трение в передаточном механизме и нелинейность показаний.
Цель изобретения, - повьшение точности весов.
Для этого в весы введен механизм
5 предварительного взвешивания, выполненный в виде коромысла, взаимодействующего через изолирующий узел, рычаг и тягу с измерительной системой, и системы уравновешивания с
10 преобразователем некомпенсации, компенсатором и усилителем с цифровым выходом, причем измерительная сис.тема снабжена электромеханическим механизмом гиреналожения и дополнитель15НОЙ системой уравновешивания с цифровым выходом.
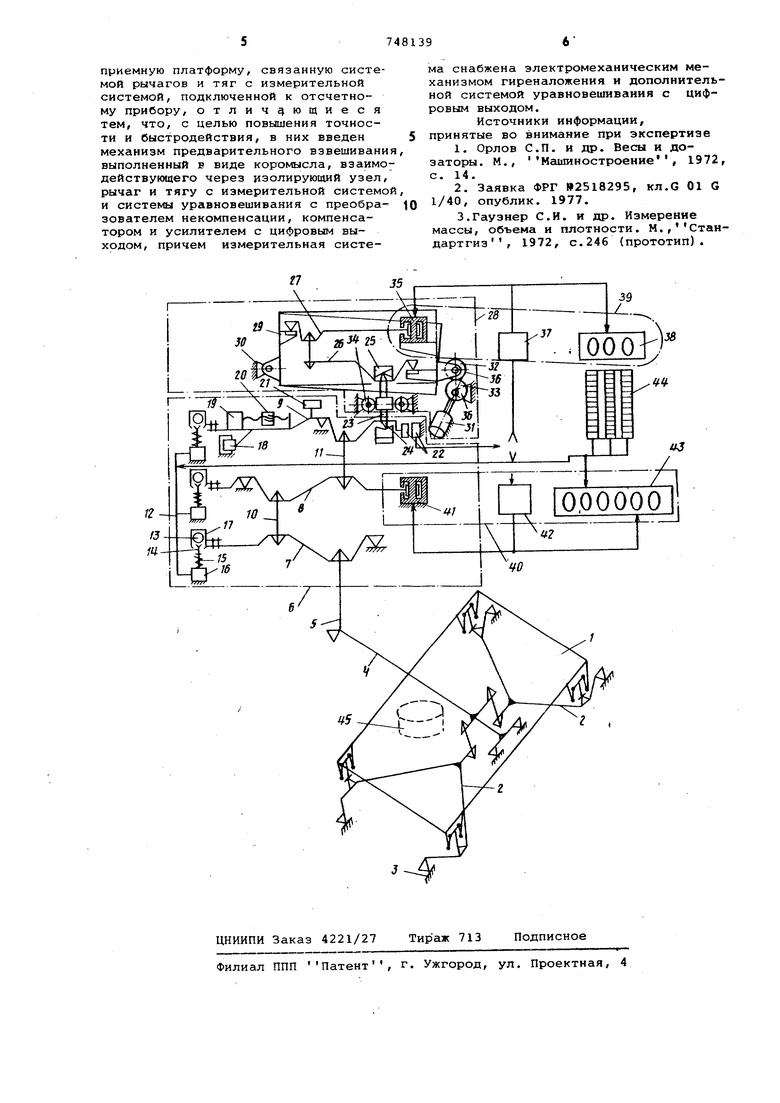
На чертеже показана схема весов. Грузоприемиая платформа 1 через систему рычагов 2 установлена на
20 неподвижном основании 3 и связана выходнЕЛМ рычагом 4 и тягой 5 с измерительной системой 6, состоящей из рычагов 7, 8 и 9, соединенных тягами 10 и 11,
25 Измерительная система 6 снабжена электромеханическим механизмом 12 наложения гирь 13, например, шарообразной формы, которые 3 верхнем (поднятом) положении лежат на штоках 14, подпружиненных пружинами 15,
а в нижнем (опущенном) положении штоков 14, в которое они приводятся соленоидами 16, гири 13 лежат в конусных стаканах 17, жестко закрепленных на рычагах 7, 8 и 9.
Кроме того измерительная система 6 имеет успокоитель 18, связанный с рычагом 9, рейтер 19 с грузом 20, регулятор 21 чувствительности, преобразователь 22 некомпенсации электрического типа, закрепленный на рычаге 9.
Верхний рычаг 9 с помощью промежточной тяги 23 с призматическими шарнирными парами 24 и 25 и рычага 26 взаимодействует с измерительным коромыслом 27 механизма 28 предварительного взвешивания,содержащим,кроме того, раму 29, шарнир 30, двигатель 31, ролик 32, кулачок 33, упоры 34 и компенсатор 35.
Рычаг 26 и измерительное коромысло 27 установлены на раме 29, поворачивающейся в шарнире 30 на угол Дф изол. с помощью двигателя 31, ролика 32 и кулачка 33, образующих изолирующий узел 36.
Компенсатрр 35 совместно с усилителем 37,имеющим блок 38 цифровой индикации, и преобразователем 22 некомпенсации образуют систему 39 автоматического уравновешивания.
Измерительная система 6 снабжена дополнительной системой 40 автоматического уравновешивания, выполненной в виде компенсатора 41 установленного на рычаге 8, усилителя 42, блока 43 цифровой индикации, а также преобразователем 22 некомпенсации, общим с системой автоматического 39 уравновешивания. Электромеханический механизм 12 снабжен узлом 44 дистанционного управления, вырабатывающим управляющие сигналы для соленоидов 16. Узел 44 электрически сблокирован с блоком 43 цифровой индикации, на котором регистрируются значения массы старших разрядов, задаваемые узлом 44. Измеряемый груз 45 устанавливается на грузоприемной платформе 1.
Весы работают следующим образом.
На грузоприемную платформу 1 устанавливается измеряемый груз 45 с неизвестной массой т. Усилие, пропорциональное весу груза 45, чер систему рычагов 2, выходной рычаг 4 и тягу 5 передается на.измерительную ристему 6, вызывая наклон рычагов 7, 8 и 9.
Изолирующий узел 36 приводится в действие и с помощью двигателя 31, ролика 32 и кулачка 33 поднимает раму 29 механизма 28 предварителного взвешивания до тех пор, пока промежуточная тяга 23 своей призматической шарнирной парой 24 не
вступит в кинематическую связь с .рычагом 9 измерительной систе№л 6.
Преобразователь 22 некомпенсации выдает сигнал в усилитель 37 системы 39 автоматического уравновешивания, которая направляет компенсационный сигнал в компенсатор 35, приводя рычаг 26, измерителное коромысло 27 и рычаги 7, 8 и 9 в исходное (нулевое) положение, занимаемое ими до наложения груза 45 на платформу 1.
Результат предварительного взвешивания массы т груза 45 регистрируется блокрм 38 цифровой индикации .
После этого в узле 44 дистанционного управления набирается значение массы (предварительно измеренное значение), и в механизм 12 подается сигнал управления, включающий соответствующее число соленоидов 16 и опускающий необходимое число гирь 13 в конусные стаканы 17 При этом производится регистрация значения тхпр на блоке 43 цифровой индикации ( в регистре старших декад ).
Одновременно изолирующий узел 36 приводится в положение разизолирование, когда рама 29 механизма 28 предварительного взвешивания опускается на угол . и промежуточная тяга 23 и ее призматическа шарнирная пара 24 выходят из зацепления с рычагом 9 измерительной системы 6 .
Преобразователь 22 некомпенсации выдает сигнал, пропорциональный остаточному разбалансу рычага 9, который после усиления в усилителе 42 дополнительной системы 40 автоматического уравновешивания подае.тся в компенсатор 41, приводя рычаги 7, 8 и 9 в исходное (нулевое) положение.
Одновременно этот сигнал поступает в блок 43 цифровой индикации (на младшие декады регистра Отсчет измеренного значения массы mj( ведется по блоку 43 цифровой индикации с учетом старших и младших декад.
Градуировка весов ведется с помощью образцовых гирь известной массы путем настройки и юстировки передаточного отношения рычагов 2, 4,7,8,9/26. и 27, а также перемещения стаканов 17 с гирями 13 и подстройки масштабов компенсаторов 35 и 41 совместно с блоками 38 и 43 цифровой индикации.
Формула изобретения
Прецизионные большегрузные стационарные весы, содержащие грузо
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1456795A1 |
| Автоматические весы | 1981 |
|
SU1000771A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| Весы с электромагнитным уравновешиванием | 1987 |
|
SU1552012A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
