(54) ДАТЧИК ДАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический датчик давления | 1982 |
|
SU1040355A1 |
| Дифференциальный измеритель давлений | 1975 |
|
SU601583A1 |
| Датчик скорости потока газа | 1977 |
|
SU613247A1 |
| Дифференциальный индикатор давления | 1975 |
|
SU531049A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИЗМЕРИТЕЛЬНЫЙ ДЛЯ КОНТРОЛЯ И ИЗМЕРЕНИЯ ПЛОТНОСТИ ЗАГРЯЗНЕННЫХ И ЧИСТЫХ ЖИДКИХ СРЕД | 2009 |
|
RU2390755C1 |
| СПОСОБ ЗАМЕРА БЫСТРОМЕНЯЮЩЕГОСЯ ДАВЛЕНИЯ | 2005 |
|
RU2293296C2 |
| Датчик давления | 1984 |
|
SU1368677A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗВУКОВОГО ДАВЛЕНИЯ | 2008 |
|
RU2384826C1 |
| Дифференциальный пьезоэлектрический преобразователь | 1981 |
|
SU979902A1 |
| Датчик давления с частотмым выходом | 1975 |
|
SU690345A1 |
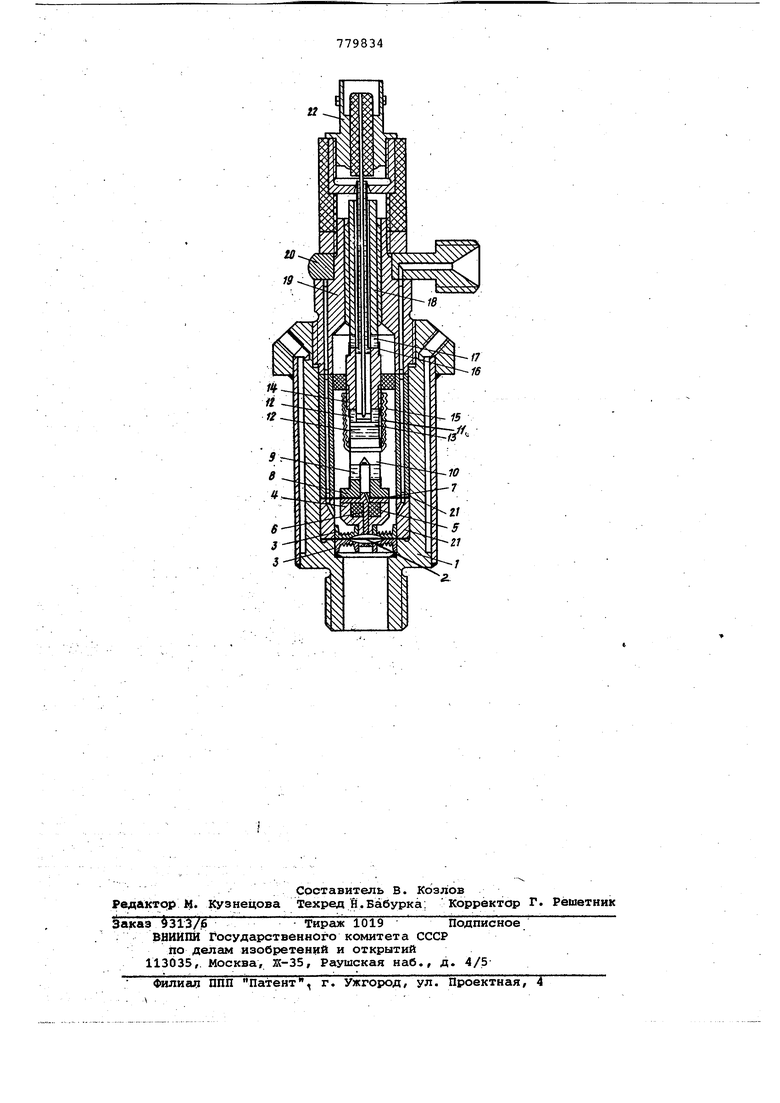
Изобретение относится к области приборостроения и предназначено для измерения быстроменяющихся давлений например, в цилиндре двигателей .внут треннего сгорания (ДВС). Известны датчики давления, содержащие корпус, чувствительный элемент выполненный в виде мембраны, закрепленной в корпусе, и пьезокварцевый преобразователь, преобразующий давление на мембрану в электрический сигнал il. Недостатком указанного датчика . является то, что он имеет сравнитёль то большую погрешность в измерениях давлений. Известно техническое решение, содержащее корпус с закрепленной в нем между двумя полусферическими решетчатыми поверхностями чувствительной мембраной преобразователя давления в электрический сигнал 2. Суй(ественным недостатком указанного датчика давления является то/ что он фиксирует только усредненные значения текущего давления за определенное количество циклов, что не всегда удовлетворяет экспериментатора, особенно при исследовании фаэовых характеристик процесса горения в две. По этой причине при проведении экспериментальных работ на ДВС иСпользуют два; датчика давления: пневМоэлектрический, для измерения усредненных за несколько циклов значений индикаторного давления, и пьезоэлектрический, для измерения теку- . (дих значений давлений за один цикл. Целью настоящего изобретения является повышение точности измерения за счет расширения объема информации о значениях быстроменяющегося давле-г ния и возможности одновременной регистрации по цикловых.и усредненных значений измеряемого давления. Указанная цель достигается тем, что преобразователь давления выполнен в виде последовательно расположенных индуктивного Ипьезоэлектрического преобразователей с установленной между ними дополнительной мембраной, образующей с чувствительной мембраной полость компенсирующего давления.. На чертеже представлен общий вид предлагаемого датчика, включающего корпус 1, внутри- которого находятся приемная мембрана 2, зажатая межУ двумя полусферическими решетками З; индуктивный преобразователь 4 катушкой индуктивности 5 и warнитопроводом 6J разделительная мембрава 7, йроставка 81 изолятор 9, едная прокладка 1.0j пьезокварцевый преобразователь 11, состоящий из двух кварцевых пластин 12, между которыми расположен токосъемник 13, корпус чувствительного элемента 14,на который опирается пьезоква1зцевый преобразователь, затянуть1й гофрированным стаканчиком 15, второй токосъемник16, опирйкяцийся через изолятор 17 на штуцер 18. При помощи штуцера 18, ввернутого во втулку 19, пьезокварцевый преобразователь 11 прижимается к верхне- полусферической решетке, 3. Подвод воздуха под давлением осуществляет ся через серьгу 20, которая крепится во втулке 19; имеющей отверстие для передачи воздуха в компенсирующую полость между мембранами 2 и 7 через кольца 21. Конец обмотки индуктивного преобразователя 4 соедине.н с корпусом 1 датчика давления, а начало обмотки выведено через отверстие в магнитопроводе 6 к прокладке 10, с которой электрически связан .корпус 14, на который опирается пьезокварцевый преобразователь 11,
Датчик давления работает следующим образом. .
Измеряемое давление через нижнюю полусферическую решетку 3 подается на приемную мембрану 2. Так
как верхняя полусферическая решетка 3 имеет сферическое углебление, то приемная мембрана 2 под действием давления прогибается,Вследствие этого изменяется эазор между приемной мембраной 2 и магнитопроводом б индуктивной катушки 5.индуктивного преобразователя 4. Полученный при этом электрический сигнал от обмотки преобразователя 4 .через токосъёмник 16, соединённого с корпусом разъ ема 22, из6ли|р6ванного от основного корпуса 1. датчика, может быть подан по экранной оплетке соединительного кабеля на входы индуктйвного и стробоскопичес1 ого усилителей (на чертеже не указаны).Корпус датчика электрически соединен с корпусами этих усилителей через .трубку подвода компенсирующего давления, которай крепится к серьге 20, Величина элекТ 5йчёскдго сигнала определяется ycjuлием, которое потребно для прогиба мембраны 2, и пропсзрциональна измеряемому давлению, В этой фазе работы датчика производится измерение низких быстроменяющихся давлений, втом числе и давлений ния(ё атмос-.. ферного, т, к. мембрана имеет возможность прямого и обратного хода (за счет полусферических углублений в верхней и нижней рёшет1сах 3) .
В этой же фазе работы датчика дс момента соприкосновения приемной мембраны 2 с верхней полусферической решеткой 3 от индуктивного преобразователя 4 производится подача импульса на стробоскопический индикатор,
В следующей фазе с ростом измеря емого давления приемная мембрана 2 начинает давить на верхнюю полусферическую решетку 3, которая с свой
очередь передает это усилие на корпус индуктивного преобразователя 4 и через разделительную -мембрану 7 и изолятор 9 далее на пьезокварцевый преобразователь 11, При этом
$ происходит сжатие кварцевых пластин 12, в результате чего, образуется электрический, заряд, пропорциональный приложенной силе или измер яемому давлению. Заряд с пьезопреобразова0 теля 11 снимается с помощью токосъемника 13 и может быть подан.на электрометрический усилитель (на чертеже не указан), соединенный с центральным штырем разъема 22 по
центральной жиле соединительного кабеля (на счертеже не указан). Если корпусы приборов связаны электрически между собой, а внутреь нее сопротивление индуктивного преобразователя мало по сравнен.ию с входным сопротивлением электрометрического усилителя (10-100 Ом и 10 -10 Ом) , то для последнего экранная обмотка кабеля является замкнутой на корпус. Поэтому предлагаемый датчик давления
5 с применением двух преобразователей неэлектрических величин (индуктивного и пьезокварцевого) дает возможность применять его одновременно с тремя различными усилителями (индуктивным, электрометрическим и стробоскопическим) с помощью одной линии связи (кабеля),
При спаде измеряемого давления .
J процесс измерения происходит в обратном порядке и в момент отрыва приемной мембраны 2 от верхней полусферической решетки 3 происходит подача импульса на стробоскопический индиQ катор. Причем в процессе измерения давления и калибровки стробоскопического индика тора в полость между Ариемной 2 и разделительной 7 мембранами через втулку 19 и канаты конец 21 из специального воздушного баллона, подсоединяемого к серьге 20, подается компенсирующее давление, которое прижимает приемную мембрану 2 к нижней полусферической решетке 3. Если величина компенсирующего давления меньше измё ряемого на величину Р, то на стробоскопический индикатор подается электрический и 1Пульс, который фиксируется на диаграмме в виде точки,
5 Изменяя компенсирующее давление от
О до максимальной величины измеряемого давления, можно получить на ди аграмме ряд последовательных точек, образующих. кривую измеряемого давлекия за несколько циклов.
Подачей компенсирующего давления между мембранами 2 и 7 можно восползоваться и для.калибровки пьезокварцёвого преобразователя 11.
Калибровка может производиться в двух режимах: в статическом, когда измеряемое давление отсутствует, и в динамическом - в процессе регистрации измеряемого давления.
В первом случае компенсирующее, давление, воздействуя на разделителную мембрану 7, сжимает .кварцевые пластины 12, на которых возникает заряд, пропорциональный поданному компенсирующему давлению.
При динамической калибровке на осциллограмме получается запись только части измеряемого давления за вычетом величины, крмпенсирукщего давления Р (Р Р;и-Р1 -йР) .Отсюда видно, что погрешность пьезокварцевого преобразователя при измерении давлений и динамическом способе калибровки в основном определяется величиной усилия прогиба приемной мембраны 2 (лР) и может быть сведена к минимуму, как систематическая.
При измерении низких давлений (CkP) с помощью индуктивного преобразователя 4 калибровка произво-г дится аналогично, но с подачей небольших (до 1-4 кгс/см ) значений компенсирующего избыточного или вакуумного давлений.
Предел измерения низких давлений () устанавливается подбором различной толщины приемной мембраны 2.
Технико-экономическая эффектив- ность от использования датчика давления, выражается в том, что он, во-первых, дает возможность регистрировать иийкиё давления, имеющие место в цилиндре двигателя в период продувки и выхлопа, во-вторых, позволяет осуществлять калибровку преобразователей непосредственно на работзкяцем двигателе в любой момент и тем самым повысить точность измерений и, в-третьих, обеспечивает одновременную регистрацию усредненных и цикловых значений текущего давления, а такжепозволяет производить замеры низких давлений, что сокращает время проведения экспериментов при . испытании ДВС и повышает производительность труда.
Формула изобретения
20
Датчик давления, содержащийкорпус с закрепленной в нем между двумя решетчатыми полусферическими поверхностями чувствительной мемc браной преобразователя давления в электрический сигнал, отличающийся тем, что, с целью повышения точности измерений, преобра, зователь давления выполнен в виде последовательно расположенных ин0дуктивного и пьезоэлектрического преобразователей с установленной между ними дополнительной мембраной, образуюцей с чувствительной мембраной полость компенсирукядего давления.
5
Источники информации, принятые во внимание при Экспертизе
№ 236820, кл. G 01 L 23/10, 24.07,67.
И
