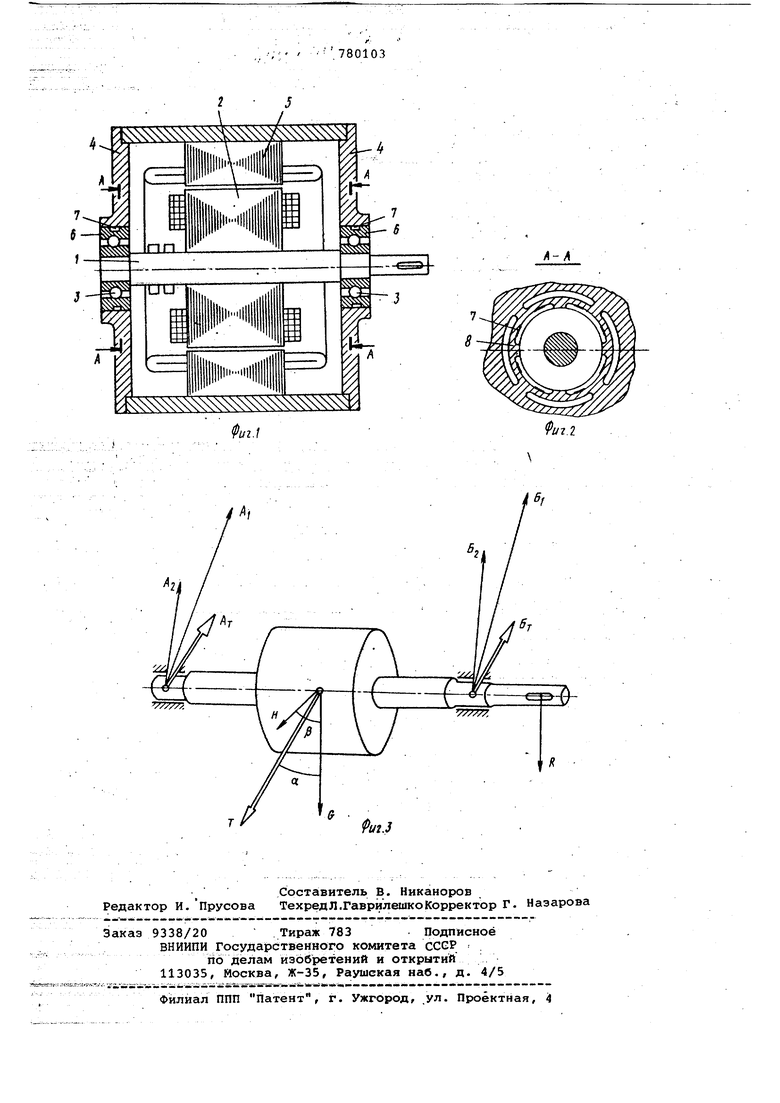
Изобретение относится к электротехнике, а именно к способам опре-деления одностороннего магнитного тяжения электрической машины. Известны способы экспериментального определения одностороннего магнитного тяжения электрической машины, при осуществлении которых необ ходимо разбирать машину. При снимают подшипниковые щиты, статор и ротор устанавливают друг относительно другав приспособлении с эк.сцентрисйтетом величины и направления, причем один из них (статор или ротор) закрепляют в при способлении через тарированные иэт мерители, например упругие элементы с тензодатчиками. С помощью указанных средств при включении машины определяют величину взаимного магнитного притйжения ротора и стато.ра, направления действия которого заранее известно Ij . Недостаток указанного способа сложность реализации. Известен также способ измерения вектора одностороннего магнитного тяжения электрической мдшииы, преимущественно с жестким ротором, посредством измерения векторов радиальных усилий на подшипниках ротора в рабочем режиме и в обеспеченном состоянии при одной и той же частоте вращения, и последунхцего нахождения вектора магнитного тяжения как разности измеренных векторов 2 . Данное техническое решение наиболее близко к изобретению по технической сущности и достигаемому результату. Недостаток указанного способа малая точность, определяемая тем, что вектор магнитного тяжения связан во многих случаях с угловым положением ротора, а последнее в известном способе не фиксируется. Цель изобретения - повышение точности . Для реализации поставленной цели измеряют угловое положение ротора, а измерение векторов радиальных усилий в двух указанных режимах работы электрической машины производят при одном и том же угловом положении ротора. . На фиг.1 изображена электрическая машина со встроенными измерителями рсщиальиых усилий на подшипниках ротора; на фиг.2 измерителями радиаЛЬных усилий встроены в прилегаю- адие к подшипникам упругие, элементы; на фиг.3 схематически показан ротор; с действующими на него одностороннйм магнитным тяжением Т, направленным под углом oi к весу 13ротора, усилием неуравновешенности Н массы ротОра, направленным под. углом /Ь , и.. 1радиг.льиой силой R немагнитной природы, направленной в сторону веса ритора.- :,-- -. .;-: Вал 1 жёсткого ротора 2 установлен «а ПоДптпниках 3, размещенных в Щитах 4 статора 5..На наружных кольцах б:подшипников, йсцользующихся в качестве упругих элементов, установленытензодатчики 7, с по- / мощью которых -Определяют величину и направление радиальных рейдсций опор ротора.. .
--,
Могут быть также использованы . устройства с тензодатчиками 7,. встраиваемыми в прилегающие к подшипни- . кам 3 упругие элементы 8(фиг. 2). Возможно применение и пьезоэлементов/ устанавливаемых на опорах ротора 2. Тарировку измерителей целесообразно. проводить в собранной машине, например-, по известному весу ротора 2 и навескам к нему, устанавливаемых на концах вала -1 или Заменяющих их э лементах, а также с помощью динамометров, закрепляемых на концах вала 1, что позволяет создавать на роторе 2 необходимые радиальные усилия как согласно, так и встречно весу ротора 2.
Qnoco6 реализуется следующей совокупностью операций. .
Для определения вектора одностороннего магиитного тяжения электрической машины, измеряют векторы радиальных усилий на подшипниках3 ротора 2 с помощью связанных с ними тензодатчиков 7. Измерения проводят в собранной машине, находят векторы . радиальных усилий на подшипниках в за(данном рабочем режиме, при фиксируют соответствующее угловое положение ротора 2, например с помощью Датчиков угла индукционного или емкостного типа.В данном режиме . на роторе 2- и его подшипники 3 помимо одМ остороннёго магнитного тяжения действует радиальная составля1ацая сиЯ немагнитной природы от веса ротора 2, его неуравновешенности, неточностей центровки соединяемых валов и других причин. Векторы радиальных усилий на подшипниках 3 измеряют и в обесточенном состоянии машины, (отключено возбужд1ение, токовая нагрузка статора) непосред ственно после выхода ее из указанного рабочего режима и затухания электромагнитных процессов при час бтё- йращёнйя и угловом полож тнии ротора 2 рабочего режима. В оёесточеннОм состоянии машины при указанных условиях на ротор 2 и его подшипники 3 действуют лишь силы немагнитной природы, причем их радиальная составляющая равна по величине и направлению радиальной составляющей
сил немагнитной природы рабочего ре- . жима, так как сохраняются практически неизмене ннйми.тепловое состояние машины, динамика ротора 2, обеспе 1иваются идентичными частота вращения
и угловое положение ротора 2, условия .соединения с приводомJ нагрузкой и другие факторы, определяющие радиальные нагрузки ротора 2 немаг- : нитного происхожден5{я. Прогиб жест- кого ротора 2 в обоих режимах маЛ
и практически не влияет на характер и величину, про-явления немагнитных . нагрузок ротора 2. ,
По полученным в указанных режимах векторам ре.акций опор находят их
разности, по которым определяют вектор одностороннего магнитного тяжения, соответствующий заданному рабочему режиму машины.
, .- . ,. :: . .
Так согласно изобретению определяетс -я одностороннее магнитное т.яжение в собранной электрической машине, при этом учитываются реальные факторы ее сборки, режимы и условия работы. Из измерений исклюЧаются помимо веса ротора и другие радиальные силы немагнитной природы, имеющиеся в конкретном образце машины в уЬловиях заданного рабочего режима, что позволяет получить характеристики реальной машины, повысить точность измерений. Для доведения измерений не требуется производить разборки машины, изготовлять специальной оснастки, необходимых в известных способах. Предложенный способ может быть применен в машинах различных типов, мощностей и частот вращения.
Для измерения магнитного тяжения электрической машины (имеющей статический или динамический эксдентриситет ротора) в генераторном режиме работы, когда ее Ьал Г соединен с валом привода с помощью муфты (не показано), в мамине устанавливают
I заданный рабочий режим и с помощью встроенных датчиков 7, измеряют векторы радиальных усилий на опорах (фиг.З) в этом режиме и соответствующих ему условиях эксплуатации-тепловых, монтажных и др., при этом фиксируют соответствующее угловое положение ротора 2 относительно статора 5, для чего могут быть использованы
датчики индукционного или емкостного типа. В данном режиме на ротор 2
воздействуют помимо магнитного тяжения Т, также вес G. ротора, усилие неуравновешенности Н его массы, радиальная сила R вызванная, например., неточностью центровки валов
в соединительной муфте; Затем машину обесточивают (отключают возбуждение) и спустя 0,2-0,5 с после выхода из генераторного режима, когда затухнут электромагнитные процессы и практически не изменится тепловое состояние машины, измеряют векторы Ал и БЗ радиальных усилий на опорах при частоте,вращения и угловой положении ротора 2 генераторного режима. При указанных УСЛОВИЯХ:в обесточенном состоянии машины на ротор 2 действуют лишь силы неЙагнитнрй природы (вес G ротора, усилие неурановешенности Н, сила р), радиальная составляющая которых- по величине и направлению сохраняется практически неизменной и равной радиальной составляющей сил немагнитного происхождения генераторного режима. Это позволяет по найденйым векторам реакций опор в указанных режимах определить их разности А Б,а по ним определить величину и направление одностороннего магнитного тяжения Т машины в генераторном режиме ... . При работе в двигательном режиме с нагрузкой (или на холостом ходе) перед обесточиванием машины поднимают незначительно (примерно 5-10% частоту вращения, а векторы радиаль ных УСИЛИЙ на подшипниках 3 в обесточенном состоянии измеряют на выбеге машины совместно с соединенной с ее ротором 2 нагрузкой.
Точность измерений повышается за счет уменьшения составляющей погрешности от сил немагнитной природы и учета фактических допусков изготовления. Например, в машине, на ротор которой помимо веса немагнитная нагрузка, соизмеримая с вели;чиной магнитного тяжения, точность измерений может быть повышена в 2 раза. Погрешность способа определяется в значительной мере конструкцией встраиваемых измерителей,схемой их подклрчения, точностью тарировки и термокомпенсации. Для осуществления измерений не требуется дополнительных затрат на inpoeKTHpOBaV ние и. изготовление приспособлений необходимых для обеспечейия работы i машины в заданных режимах, стоимость которых может составлять до 30% сто мости-машины. Измерения предложенным способомМОЖНО производить как при .исследованиях электрических Машин-: на стадии их разработки, так ив J условиях эксплуатации на объекте применения. Встраиваемые на опорах датчики могут использоваться одновременно для диагностики состояния машины в период эксплуатации.
Применение способа позволит разработать более надежные конструкции электрических машин с учётом действующих, на роторы, onopta, сердечники магнитньк нагрузЬк.
20
Формула изобретения
Способ измерения вектора односто.poHrfero магнитного тяжения электрической машины, преимущественно с жестким ротором, посредством измерения векторов радиальных усилий на опорах ротора в рабочем режиме и в обесточенном состоянии при одной и.той же частоте вращения, и последующего нахождения вектора магнитного тяжения как разности измеренных векторов, отличающийс я .тем, что,с целью повышения точности, измеряют угловое положение ротора, а измерение векторов радиальных усилий в двух указанных ре- жимах работы электрической : машины производят при одном и том жеугловом положении ротора. Источники информации, принятые во внимание при Экспертизе
1. Чо Хон ЕЛЬ. Исследования рат боты асинхронных машин при неравномерном воздушном зазоре. Канд.диссёртацияМ., МЭИ, 1957. 2. Гемке Р. Г. Неисправности
-эайктричёскнх машин. Л.,- Энергия, 4975, С.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения одностороннего магнитного тяжения при ускоренных испытаниях электрической машины | 1988 |
|
SU1640661A1 |
| Устройство для испытаний подшипниковых опор электрических машин | 1990 |
|
SU1735972A1 |
| Способ ускоренных ресурсных испытаний подшипников качения в опорах ротора электрической машины | 1988 |
|
SU1628149A1 |
| Электрическая машина | 1990 |
|
SU1794271A3 |
| Устройство для исследования влияния эксцентриситета на характеристики электрических машин | 1987 |
|
SU1464254A1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| Способ диагностики двухполюсного ротора с постоянными магнитами | 2018 |
|
RU2704567C1 |
| Магнитоэлектрический синхронный генератор обращенной конструкции | 1980 |
|
SU907713A1 |
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ - ГРЕБНОЙ ВИНТ | 1996 |
|
RU2115590C1 |
| Способ контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1203444A1 |