В целом, в частности отсадочной машиной, а предназначено только упра)зления отдельной: его ступенью. Такое разобщенное управление ступеня Й1Г ЙЪгЪ€ пенчато о объё1 та пр,ствии случайных возмущений (изменение нагрузки, качество исходного материала) приводит к увеличении йзаимозасорения продуктов обогащения,т,.е.. не позволяет получить требуемую точность управления объектом.
Цель изобретения - повашение точности управления.
Поставленная цель достигается тем, .что стройство снабжено датчиком скорости перемещения материала вдоль ступени процесса, блоком умножения, датчиком производительности по удаляемому обогащенному продукту из ступе- .ИИ и блоком коррекции, причём, входы блока умножения соединены с выходами датчика скорости и датчика высоты , а выход - со вторвлм уходом блока сраЪнения, вь1ход да тчика пройзводительности соединен со входом б.пока коррекции, выход которого подключен ко второму вхбду регулирующего блока канала управления последующей ступени процесса. ...
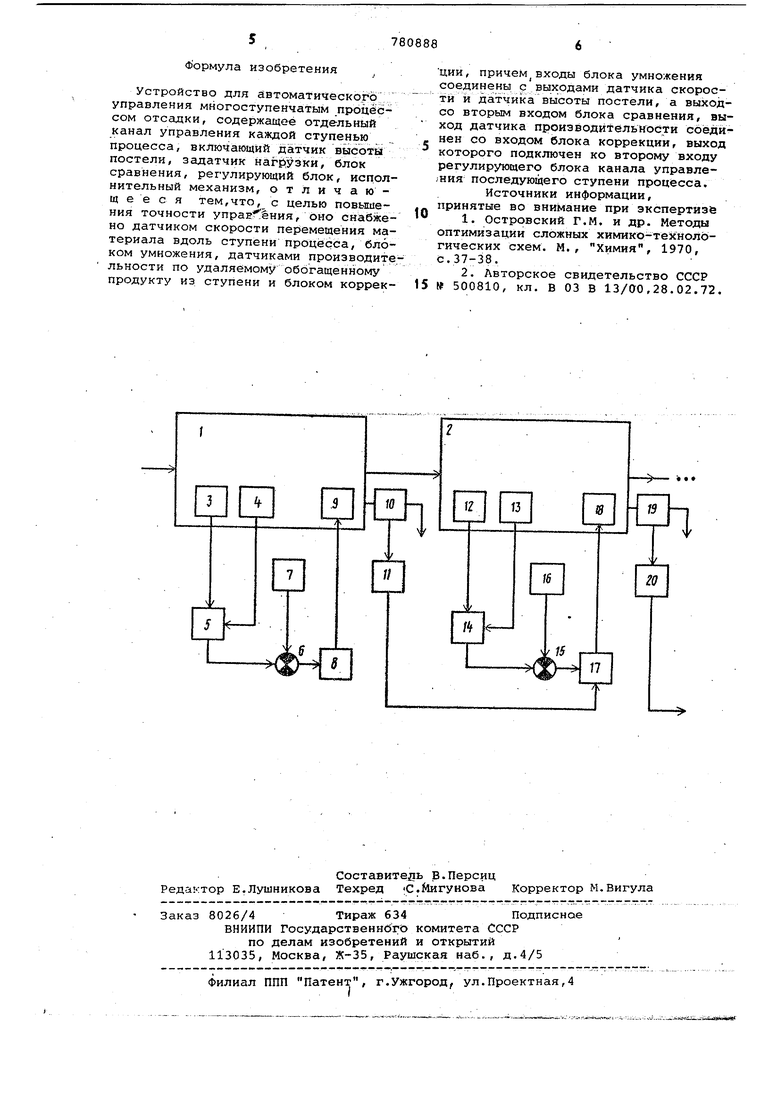
На чертеже изс-бра5кён а структурпая
схема устройства.
Устройство управления многоступенчатым процессом отсадки первой ступенью 1, второй ступенью 2, содержит датчик 3 высоты постели обогащаемого продукта, датчик 4 скорости перемещения материала вдоль ступени 1, блок 5 умножения, блок 6 сравнения, задатчик7 нагрузки по оеЗогащаемому продукту, регулирующий блок 8, исполнительный механизм 9, датчик 10 производительности по удаляемому р Зргащенному продукту, блок 11 коррекцииJ второй канал упра вления содержит датчик 12 высоты постели обогащаемого продукта, датчик 13 скорости перемещения материала вдоль ступени 2, блок 14 умножения, блок 15 сравнения, задатчик 16 нагрузки по обогащаемому
продукту, регулирующий блок 17, исполнительный механизм 18, датчик 19
производительности по удаляемому
обогащенному продукту, блок 20 кор рекцйи.J.; ;..;..; , ...,;„.,;,. „„,„.,,..,-.„,..,.,
. Устр ойство работает следующим образом.
Исходный материал, состоящий из нескольких компонентов (например, породы, промпродукт, концентрат), по: дается в породное отделение отсадочной машины - первая ступень. Породное дтде.ление (как и промпрод уктовре) мо;;жет состоятьй з одной или двух сту.. пеней.
В первой ступени 1 под воздёйствием колебательного процесса происхориала по П.ЛОТНОСТЯМ. Болеё тяжелый продукт (порода) оседает на ЕГёшётб,
780888
образуя плотный слой. Датчик 3 высоты постели измеряет высоту этого слоя, а датчик 4 скорости измеряет скорость его перемещения вдоль ступени 1. Сигналы с датчиков 3 и 4 поступают в блок умножения 5, в котором перемножаются, а на выходе поучае тся (при известной ширине ступени) сигнал пропорциональный нагрузке по породе на ступень 1. Сигнал о нагрузке по породе с блока 5 умножения подается в блок б сравнения, на другой вход которого вводится сигнал с задатчика 7 нагрузки. Результирующий сигнал подается в регулирующий блок 8, который управляет исполнительным механизмом 9. Исполнительный механизм 9 производит выгрузку обогащенного продукта (породы) из ступени 1, осуществляя таким образом соответствие между текущей нагрузкой по порое на ступень 1 и заданием по нагрузке на эту ступень, количество выгруЖйййОго Ий ступени 1 обогащенного продукта изме1Э1яется датчиком 10 производительности, сигнал которого подается на вход блока 11 коррекции, Бь1:йод которого подключен ко второму входу регулирующего блока 17 послеующего канала управления ступенью 2. Работа ступени 2 аЕ1алогична описанной выше работы ступени 1.
Сигналы с датчика 12 высоты постели по обогащаемому продукту ступени 2 и с датчика 13 скорости перемещения материала вдоль ступени поступают в блок 14 умножения, в котором перемножаются и на выходеполучается сигнал, пропорциональный нагрузке по обогащаемому продукту данной ступени. С блока 1 4 умножения сигнал подается в блок 15 сравнения,на другой вход которого ввОдИтся сигнал с задатчика 16 нагрузки. Результирующий сигнал подается в регулирующий блок 17, на второй вход которого вводится корректирующий сигнал с блока 11 коррекции предыдущего канала управления ступенью 1. Регулирующий блок 17 управляет исполнительн,ым механизмом 18, который производит выгрузку обогащенного продуктаступени 2. количество выгружаемого продукта измеряется датчиком 19 производительноС| й,сиГнал которого подается на вход блока 20 коррекции. Блок 20 коррекции формирует величину корректирующего сигнала, который вводится ь регулирующий блок последующего ка-нала управления.
Таким образом, автоматически ком: пенсируются возмущения, вносимые дыдущей ступенью, что приводит к
уменьщеШЮ.вэаимозасорения продуктов обогащения, т .е. повышается точность уп15авлёния, rtpn этом взаимозасоренность продуктов обогащения отсадочic ных машин уменьшается на О,1-0,2%
Формула изобретения
Устройство для автоматического : управления многоступенчатым процессом отсадки, содержащее отде льный канал управления каждой ступенью процесса, включающий датчик высоты постели, задатчик нагр|узки, блок сравнения, регулирующий блок, исполнительный механизм, отличающееся тем,что, с целью повышения точности упран ения, оно снабжено датчиком скорости пер)емещения материала вдоль ступени процесса, блоком умножения, датчиками производительности по удаляемому обогащенному продукту из ступени и блоком коррекции, причем входы блока умножения соединены с выходами датчика скорости и датчика высоты постели, а выходсо вторым входом блока сравнения, выход датчика производительности соединен со входом блока коррекции, выход которого подключен ко второму входу регулирующего блока канала управле:ния последующего ступени процесса.
Источники информации, принятые во внимание при экспертизе
1.Островский Г.М, и др. Методы оптимизации сложных химико-технологических схем. М., Химия, 1970, с. 37-38.
2.Авторское свидетельство СССР № 500810, кл. В 03 В 13/00,28.02.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования высоты постели в отсадочной машине | 1988 |
|
SU1558475A1 |
| Способ автоматического регулирования водовоздушного режима процесса отсадки | 1980 |
|
SU1045478A1 |
| Способ автоматического регулирования отсадочной машины | 1981 |
|
SU1005907A2 |
| Способ автоматического управления колебательным процессом отсадочных машин | 1981 |
|
SU968921A1 |
| Устройство для регулирования разгрузки тяжелых фракций из отсадочной машины | 1982 |
|
SU1077636A1 |
| Способ управления колебательным процессом в отсадочной машине | 1983 |
|
SU1139504A1 |
| Способ управления отсадочной машиной с подвижным решетом | 1988 |
|
SU1613167A1 |
| Устройство контроля работы отсадочной машины | 1988 |
|
SU1595568A2 |
| Способ управления процессом обога-щЕНия угля | 1979 |
|
SU845851A1 |
| Способ автоматического регулирования водовоздушного режима отсадки | 1977 |
|
SU957494A1 |
