, Изобретение относится к способу управления автопоездом и устройству для его реализации. Известен способ управления автопоездом с установленными между его колесными звеньями и тягачом Жестки ми управляемыми связями, заключающийся в том, что поворачивают преды дущую по ходу движения автопоезда жесткую управляемую связь Недостатком его является плохая управляемость из-за наличия перемещений в вертикальной и горизонтальной плоскостях. Известно устройство управления автопоездом, содержащее установленные между рамами колесных звеньев автопоезда с тягачом жесткие управляющие связи f2J . Цель изобретения - повышение жес кости каждого из управляемых колесных звеньев в направлении поворота. Указанная цель достигается тем, что у всех колесных звеньев, кроме последнего, поворачивают последующую по ходу движения автопоезда жес кую.управляемую связь на угол arcsiw(.), где dt - угол поворота предыдущей по . ходу движения жесткой управляемой связи;/ L - расстояние между предшеству; ющим по ходу движения автопоезда и Данным колесными звеньями; М - расстояние между данным колес: ным звеном и последующим по ходу движения автопоезда; В устройстве для осуществления способа у всех колесных звеньев, кроме последнего, жесткие управляемые связи кинематически соединены ме;кду собой с возможностью передачи движения друг другу, минуя раму колесного звена. Устройство может быть выполнено в нескольких вариантах. Жесткие управляемые связи могут быть соединены с рамой колесного звена посредством шарнирного четырех-, звенника, два противоположных шарнира которого закреплены на ползунах, перемещающихся по направляющей, закрепленной на раме колёсного звена, а два других противоположных шарнира закреплены на жестких управляемых связях, при зтом последние соединены между собой шарниром.
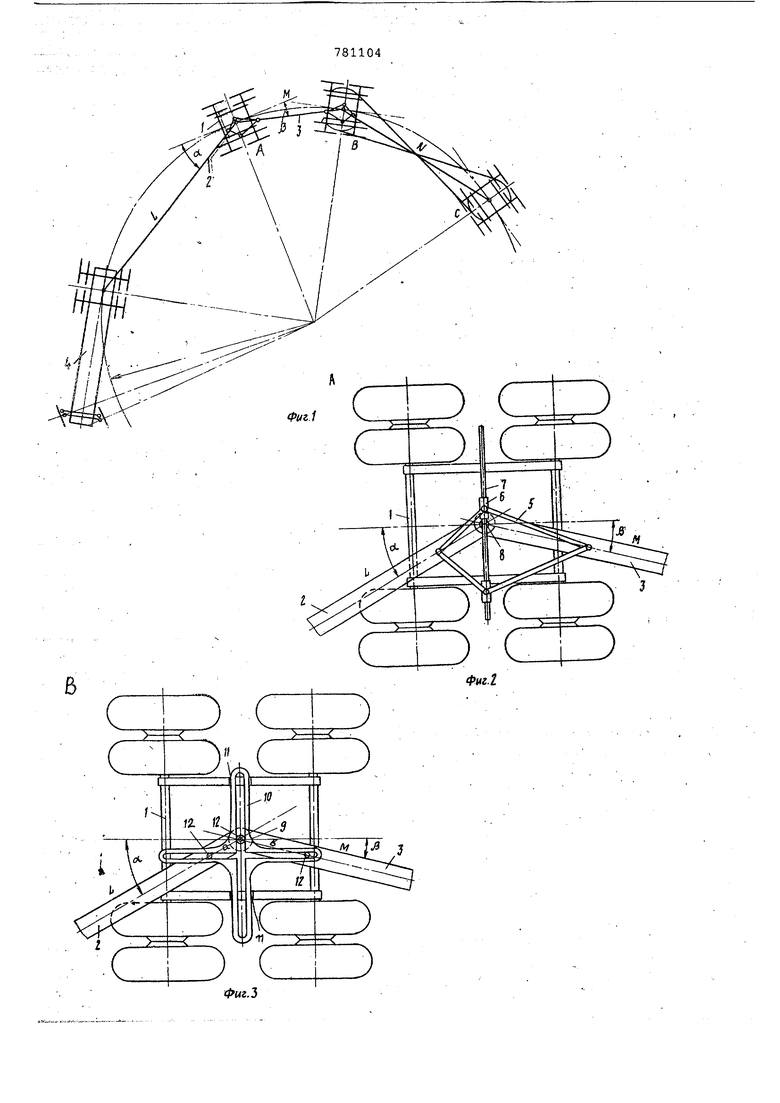
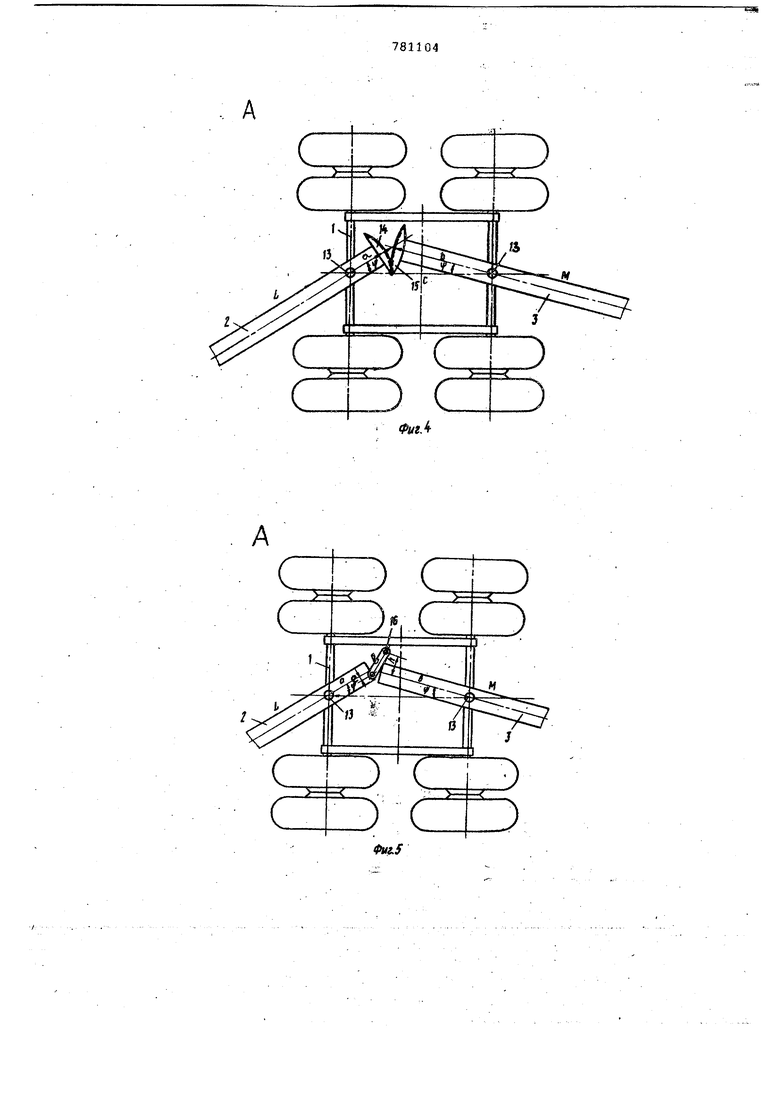
781104 Возможно соединение жестких управляемых связей между собой шарниром, и с рамоГ. колесного звена - посредством крестообразного ползуна, противоположные концы которого закреплены в направляющих рамы колесного звена, при этом на жестких упра ляемых связях и в месте шарнирного соединения последних выполнены пальцы, а на крестообразном ползуне пазы для взаимодействия с упомянутыми пальцами. .. Жесткие управляемые связи могут быть соединены с рамой колесного зве на шарнирами, а между собой передаквдим элементом, которыйможет быть выполнен или в виде двух зубчатых сегментов, закрепленных на жестких управляемых связях. Передающий элемент выполнен в тяги, шарнирно соединенной с жест 1ШЙН У11 авййёШ1йй ямй, S тяги, один конец которой шарнирнЬ связан с одной из жестких управляемых связей, а другой установлен с возможностью осевого перемещения в направляющей, выполненной s другой жесткой управляемой связи.. ; Щна из жестких управляеШхсвяз йtiiapSiipHO закреплена на раме колесного звена и шарнирно соединена с другой жёсткой управляемой связью установленной с возможностью осевого перемещения в направляющей, закреплённой на раме колесного звени. На фиг.1 изображён п оворотаВ рпоеэда по предлагаемому способу} на фиг.2 - устройство по первому вариан ту ыполнёния; на фиг.З - то же, по второму варианту выполненияj на фиг - то же; по третьему варианту выпол НИИ Ъ п«1 едакЩйй элёмвнтом, нпблне ным в Виде плоских зубчатый секторо на фиг. - то же, по «teTBeptC y варианту выполнения; на фиг.6 - тд же Iffo nfli-bSiy Варианту; на фиг.Т же ,по шестому варианту вШрйЙёййя. Автопоезд состоит из кблесйых звеньев А, В и С, одно из которых А имеет раму 1 и предыдущую 2 ду движения автопоезда и последующую 3 жёсткие управляемые связи и тягач 4. При управлений аё ъ1тое.здом с установленными между его колесны Ш эвень ш1и А, в, Си тягачом 4 жес кими управляемыми связями 2, 3, для звена- А поворачивают на угол dl предыдущую по ходу дв ия ав топоезда Ьтн6с|ительно звена А, жесткую управ ляемую связь 2, и на угол f, повора -Чйтйй r ftOTi л ё дуйЩую ходу д в иже ни я а втопоёзда, относительно звена А/ 11Шт ; 1Г 5т-равляемую связь 3; при этом угол .| (5 arcsin(- s5ncl|, : где L - расстояние между колесным звеном А и тягачом 4, М - расстояние между колесными звеньями А и В. В устройртве по первому варианту ыполнения жесткие управляемые связи соединены с рамой 1 колесного звена А посредством шарнирного четыехзвенника 5, два противоположных арнира которого закреплены на ползунах 6, перемещающихся по направляюей 7, закрепленной на раме 1 колесного звена А, а два других противопоожных шарнира закреплены на жестких правляемых связях 2 и 3, связанных ежду собой шарниром 8. В устройстве по второму варианту выполнения жесткие управляемые связи соединены между собой шарниром 9, а с рамой 1 колесного звена А - поредством крестообразного ползуна 10, противоположные концы которого закреплены в направляющих 11 рамы 1 колесного эвена А, при этом на жестких управляющих связях 2 и,3 и в месте{шарнира 9 выполнены пальцы 12, а на крестообразном пОлзуне 10 - пазы для взаимодействия с пальцами 12. В устройстве по третьему варианту выполнения жесткие управляемые связи 2 и. 3 соединены с рамой 1 колесного звена А шарнирами 13, а между собой - посредством зубчатых сегментов 14 и 15. В устройстве по четвертому варианty выполнения жесткие управляемые связи 2 -и 3 соединены с рамой 1 шарнирами 13, а между собой - шарнирно связанно й с тягой 1ё. По пятомуварианту жёсткие управляемью связи 2 и 3.связаны с рамой 1 гаарнирамя 13, а между собой - тяг:ой 17, ОДИН конец которой шарниром 18 связай с одной из жестких управЛЙёМйХ связей, например 2, а. другой установлен с возможностью осевого пе рёмещенйя в направляющей 19, выйолНенной в яругой жесткой управляемой связи, например 3. lie и етому ВАриа.н1у выполнения одна из lilicftkHX шрйвЛя рвязёй, например 2,Шарниром 20 связана с рамой 1 колеейрго звена, шарниром 21 - с другой есткоЙ управляемой связью 3, установленной с возможностью перемещения в направляющей 22, Закрепленной на раме 1. При этом последнее из колесйых звеньев автопоезда во ВСЕХ вариантах выполнения управляется известньм способом, например посредством крестообразной сцепки. . . Предлагаемый способ управления автопоездом и устройство для его осуществления позволяют задать свой курс каяиому колесному звену в соответствии с заданными параметрами звеньев; каждое колесное звено обладает независимым от других звеньев поворотом и при движении задним ходом отсутствует складывание, автопоезда, исключаете дополнительная связь между колесными звеньями, что упрощает операции разгрузки и погрузки. Формула, изобретения 1. Способ управления автопоездом с установленньми между его колесными звеньями и тягачом жесткими управ ляемыми связями, заключающийся в том что поворачивают прельиущую ходу движения автопоезда жестк та управляемую связь, отличающийся тем, что, с целью повьпиения жесткости каждого из управляемых колесных звеньев в направлении поворота, у всех колесных звеньев, кроме последнего, поворачивают последующую по хо ду движения автопоезда жесткую управ ляемую связь на угол (b aircsin - smA|, где , - угол поворота предыдущей по ходу движения жесткой связи , L - расстояние между предшеству ющим по ходу движения автопо езда,и данным колесными звеньями; М - расстояние между данным колесным звеном и последующим по ходу движения автопоезда 2.Устройство для осуществления способа по пЛ, содержащее установленные между рамами колесных звеньев автопоезда и тягачом жесткие управляемые связи, отличающеес я тем, чтб у всех колесных звеньев кроме последнего,.жесткие управляемые связи кинематически соединены между собой с возможностью передачи движения друг другу, минуй раму колеЬ ного звена. 3.Устройство по п.2, о т л и ч аю щ е е с я тем, что жесткие управляемые связи соединены с рамой колесного звена посредством шарнирного четырехзвенника, два противоположных Ыарнира которого закреплены на ползунах, перемещающихся по направляющей, закрепленной на раме колесного звена а два других противоположных шарнира закреплены на жестких управляемых связях, при этом последние соединены между собой щарНиром. 4. Устройство по п. 2, от л и ч щ е е с я тем, что жесткие управляемые связи соединены между собой шарниром, а с рамой колесного звена посредством крестообразного ползуна, противоположные концы которого закреплены в направляющих рамы колесного звена, при этом на жестких управляемых связях и в месте шарнирного соединения последних выполнены пальцы ; а на крестообразном ползуне пазы для взаимодействия с упомянутыми пальцами. 5.Устройство по п.2, отличающее с я тем, что жесткие управляемые связи соединены с рамой колесного звена шарнирами, а между собой передающим элементом. 6.Устрюйство по П.2, о т л и ч аю щ е е с я тем, что одна из жестких управляемых связей шарнирно закреплена на раме колесного, звена и шарнирно соединена с другой жесткой управляемой связью, установленной с возможностью осевого пе эемёщения в направляющей, закрепленной на раме колесного звена. 7.Устройство по п.5, о т л к чающееся тем, что передающий элемент вьшолнен в виде двух зубчатых сегментов, закреплённых на жестких управляемых связях. . 8.Устройство по П.5, о 1 л и ч аю щ е е с я тем, что передагаций эле-, йент выполнен в виде тяги, шарнирно связанной Сжесткими управляемыми связями. 9.Устройство ПОП.5, отли чающееся тем, что передающий элемент выполнен в виде тяги, один конец которой шарнщжо связан с одг ной из жестких упраоляёлолх связей, а другой установлен с возможностью осевого перемещения в направляющей, выполненной в другой жесткой управ-аяемой связи. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 521175, кл. В 62 D 13/02, 1973. , 2.Авторское свидетельство СССР № 521176,- кл. В 62 D 13/02, 1974.
Фчг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления автопоездом | 1982 |
|
SU1102701A1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| Стабилизирующее тягово-сцепное устройство прицепа с переменным поперечным наклоном шкворня | 2022 |
|
RU2790298C1 |
| Тягово-сцепное устройство одноосного прицепа с регулируемой длиной тягового рычага | 2022 |
|
RU2792139C1 |
| ПРИЦЕП ДЛЯ АВТОПОЕЗДА | 2001 |
|
RU2282551C2 |
| Тормоз наката с устройством стабилизации прямолинейного движения одноосного прицепа | 2024 |
|
RU2825212C1 |
| Опорно-сцепное устройство тракторного транспортного поезда | 2023 |
|
RU2811756C1 |
| СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 2005 |
|
RU2304540C2 |
| Автопоезд для перевозки длинномерных грузов | 1984 |
|
SU1216051A1 |
| Автопоезд для перевозки длинномерных грузов | 1988 |
|
SU1581621A1 |

)
/If. V.-.,,,...J-;-vs-...
781104
OID С
)
