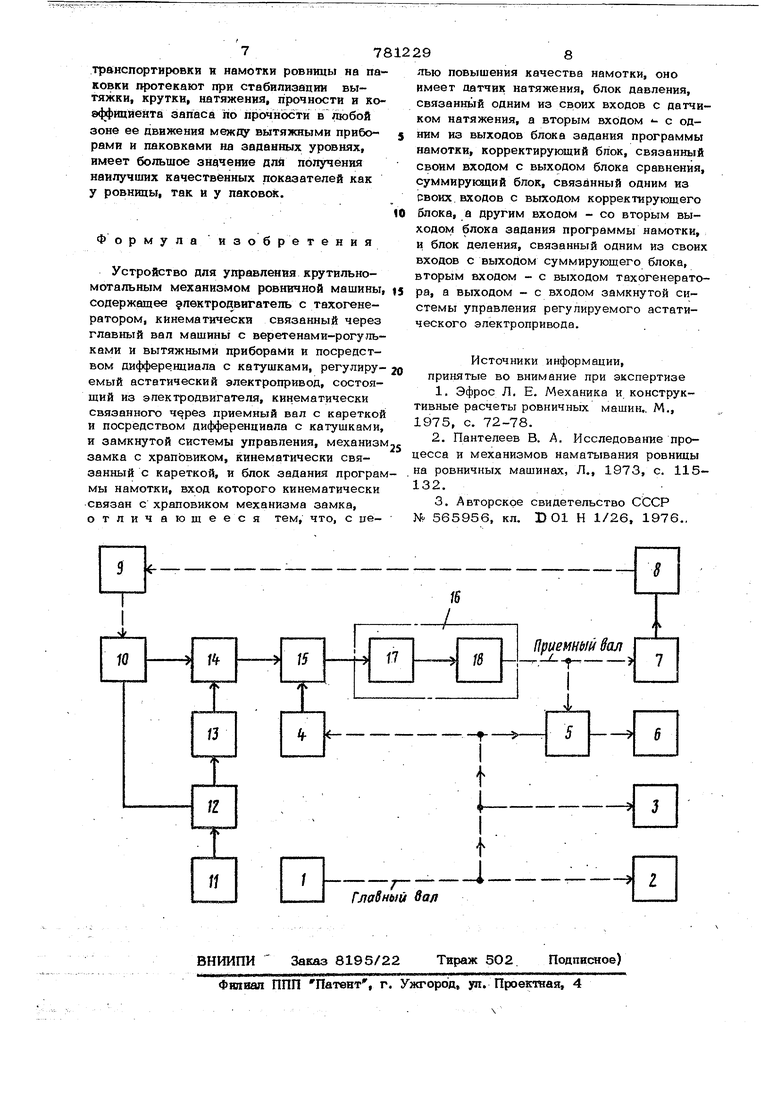
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КРУТИЛЬНО-МОТАЛЬНЫМ МЕХАНИЗМОМ РОВНИЧНОЙ МАШИНЫ Изобретение относится к легкой промышленности и может быть использовано для управления, например ровничных машин, предназначенных для получения крученой ровницы. Известно устройство для управления крутильно-мотальным механизмом ровничной машины, содержащее механизм замка приводной электродвигатель, кинематически связанный через главный вал с.вытяж HbiMH приборами и с веретенами-рогулька ми и посредством дифференциала и вариатора скорости с катушками и с кареткой управляющий храповой механизм, кинемат чески связанный с механизмом замка, кареткой и вариатором скорости У-ЗОднако оно не обеспечивает необходимой точности задания и выполнения программы намотки из-за либо несоответсрт- ВИЯ профиля коноидных барабанчиков вари атора скорости фактической закономернос ти изменения радиуса намотки паковок при выработке различных ассортиментов оовницы, либо проскальзывания и неточной установки ремня на коноидах. Это приводит к рассогласованию линейных скоростей выпуска ровницы из вытяжных приборов и намотки ее на паковки, к нарушению структуры и плотности намотки пако вок, к появлению пополнительной неровноты по линейной плотности и обрывом ровницы, к снижению ее качества и уменьшению производительности машины. Известно также устройство для управления крутильно-мотальным механи;змом ровничной машины, содержащее механизм замка, приводной, электродвигатель, кинематически .связанный через главный вал с вытяжными приборами и с веретенамирогульками крутильно-мотапьного механизма и посредством дифференциала и вариатора скорости с.катушками и с кареткой, корректирующий кулачек, выполненный, например в виде улитки, управляющий храповой механизм, кинематически связанный с механизмом замка, кареткой и через корректирующий кулачек с вариатором скорости В известном устройстве за счет введе ния в систему управления вариатором ско рости корректирукицего кулачка возможно для каждого ассортимента ровшщьг вводит коррекцию в программу намотки и тем са мым задавать ее более точно. Однако в этом случае, прежде чем спроектировать профиль корректирующего кулачка, необходимо проводить специальные длительные в трудоемкие исследования на ровничной машине, требующие применения специальной измерительной аппаратуры, на основе которых для каждого конкретного ассорти мента вырабатываемой ровницы должен быть найден профиль кулачка, соответствующий фактическому изменению радиуса намотки паковок. Наиболее близким по технической сущности к предлагаемому является устройст во для управления ,крутияьно-мотальным механизмом ровничной машины, содержаШее электройвигатель с тахогенератором, кинематически связанный через главный вал с веретёнами-рогульками и вытяжным приборами и посредством дифференциала с катушками, регулируемый астатический электропривод, состоящий из электродвигателя, кинематически связанного через приемный вал с кареткой и посредством дифференциала с катушками, и замкнутой системы управления, механизм замка с Храповиком, кинематически связанный с кареткой, блок задания программы намотки, вход которого кинематически связан с храповиком механизма замка з j. Недостатком устройства является невозможность получения высококачественной намотки паковой вследствие разомкну тости его системы управления по управля . eMbwy технологическому параметру. Цель изобретения - повышение качества намотки. Поставленная цель достигается тем, что устройство имеет датчик натяжения,, блок сравнения, связанный одним из своих входов с датчиком натяжения, а вторым входом - с одним из выходов блока - задания программы намотки, корректирующий блок, связанный своим входом с выходом блока сравнения, суммирующий блок связанный одним из своих входов с выходом корректирукяцего блока, а другим вхо дсяи - со вторым выходом блока задания программы намотки, и блок деления, свяааннь1Й одним из своих входов с выходом суммирующего блока, вторым входом - с твьгхояом тазсбгенёратора, а выхбдбй - с входом замкнутой системы управления регулируемого астатического электропривода На чертеже схематически изображено предлагаемое устройство. Устройство содержит основной приводной асинхронный электродвигатель 1 ровничной машины, кинематически связанный через главттй вал с веретенами-рогульками 2, вытяжными приборами 3, тахогенератором 4 и одним из входов дифференциала 5, катущки 6, кинематически связйнные с выходом дифференциала 5, каретку 7, кинематически связанную с механизмом 8 замка и храповиком 9, блок 10 задания программы намотки, кинематически связанный своим входом с храповиком 9, датчик 11 натяжения ровницы, блок 12 сравнения, электрически связанный одним из своих входов с выходом датчика 11натяжения, а вторым входом - с одним из выходов блока 1О задания программы намотки, корректирующий блок 13, связанный своим входом с выходом блока 12сравнения, суммирующий блок 14, связанный электрически одним из своих входов с выходом корректирующего блока 13, а вторым входом - со вторым выходом блока 1О задания программы намотки, блок 15 деления, связанный электрически одним из своих входов с выходом суммирующего блока 14, а вторым входом - с выходом тахогенератора 4, регулируемый .астатический электропривод 16, состоящий из замкнутой системы 17 управления, подключенной своим управляющим входом к выходу блока 15 деления, и эпектродвигателя 18, электрически связанного своим входом (обмотками) с выходом системы 17 управления (например с силовым . тиристорным преобразователем) и кинематически своим выходом через приемный вал - с кареткой 7 и вторым входом ди({ьференциала 5. Устройство работает следующим образом. Перед пуском ровничной машины в работу устанавливаются в положение, соответствующие началу намотки, механизм 8 замка с храповиком 9 и подается напряжение питания на все элементы схемы управления. При этом электродвигатели 1 и 18 остаются в неподвижном состоянии: первый вследствие отключения его от источника писания, а второй вследствие равенства нулю напряжений на выходах тахогенератора 4, блок 15 -деления и системы 17 управления, электропривода 16, несмотря на то, что на выходах блока 10 задания программы намотки, датчика 11 натяжения ровницы, блока 12 сравнения, корректирующего 13 п суммирунсяцего 14
блоков устпиявливпются сигналы, отпичные от нуля: Ни одном из выходов блока 10 зап.пния программы намотки - сигнал, прямо пропорциональный начальному радиусу намотки паковок, на втором из них - сигнал прямо пропорциональный натяжению ровницы в контролируемой зоне ее движения, на выходе датчика 11 натяжения - сигнал, прямо пропорциональный фактическому натяжению ровницы, на выходе блока 12
сравнения - сигнал, прямо пропорциональный разности заданного и фактичес}сого значений натяжения ровницы, на выходе корректирующего блока 13 - сигнал, функционально связанный с входным сигналом (например, содержащий пропорциональную и интегральную составляющие) и оказывающийся прямо пропорциональным разности заданного и фактического значений радиуса тшмотки паковок, на выходе сумм ируклцего блока 14 - сигнал, прямо пропорциональный скорректированному (фактическому) значению радиуса намотки паковок.
При включении электродвигателя 1 он вместе с главным валом, веретенами-роликами 2, вытяжными приборами 3, тахогенератором 4, дифференциалом 5 и катушками 6 начинает разгоняться. На выходе тахогенератора 4 начинает появляться напряжение, прямо пропорциональное частоте вращения главного вала, а следовательно, и частоте вращения выпускных цилиндров вытяжных приборов 3. Это приводит к появлению напряжения на выходе блока 15 деления и системы 17 управления регулируемого электропривода 16. В результате начинает разгоняться электродвигатель 18 и вместе с ним через главный вал машины каретка 7. и второй вал дифференциала 5, через который катушкам 6 начинает сообщаться составляющая частота -,t вращения намотки (. Если натяжение ровницы в начале и в процессе пуска машины остается равным заданному значению то на выходе датчика 11 натяжения появляется напряжение, прямо пропорциональное фактическому значению, натяжения ровницы, на выходе блока 12 сравнения и выходе корректирующего блока 13 - напряжение, равное нулю. Поэтому коррекци{1 радиуса намотки паковок не происходит и электродвигатель 18 разгоняется в соответствии с заданным начальньтм радиусом намотки паковок и темпом изменения частоты вращения тахогенератора 4. Если же между заданным и фактическим значениями натяжения ровницы появляется рассогласование, то на выходах блока 12 сравнения и к:орректирукнцего блока 13
появляются электрические напряжения, отличные от нуля, и происходит коррекция сигналов на выходах суммирующего блока 14, блока 15 деления, системы 17 управления и электродвигателя 18, а, следовательно, и соответствующая коррекция радиуса намотки паковок, приводящая к стабилизации натяжения ровницы в процессе намотки ее на паковки.
После завершения пуска ровничной машины происходит наработка первого прослойка ровницы на катушки 6, при этом на выходе электродвигателя 18 станавливается частота вращения, прямо пропорциональная угловой скорости намотки, которая, в свою очередь, оказывается равной значению, соответствующему реальным величинам г и U)., где Г - радиус намотки паковки, а С1)ц - частота вращения выпускного цилиндра вытяжного прибора. При достижении кареткой 7 заданной высоты намотки происходит срабатьтвание механизма 8 замка, изменение направления движения каретки 7, поворот храповика 9 в новое положение на заданный угол и изменение электрического сигнала на выходе блока 10 задания программы намотки. Это приводит к изменению .электрического напряжения на выходах суммирующего блока 14, блока 15 деления и системы 17 управления и к соответствующему изменению частоты вращения электродвигателя 18. Если при этом натяжение ровницы остается равным твоему заданному значению, то коррекции радиуса намотки и частоты вращения привода 16 приемного вала машины не будет происходить, в противном случае это будет иметь место. Аналогичным образом будет происходить изменение задания радиуса намотки паковок и частоты вращения регулируемого йрШбда 16 при переходе к наработке других прослойков ровницы на паковки.
После завершения прбцесса намотки паковок отличаются электродвигатель 1 и начинается согласованное торможение его с электродвигателем 18 и всеми рабочими органами ровничной машины до потшрго останова их. Работа регулируемого привода 16 при этом происходит аналогично тому, как это было рассмотрено выше для процесса пуска, но в противоположном направлении.
Работа предлйгаемого устройства происходит с автоматической подстройкой программы намотки паковок (возможно грубо заданной) под оптимальный закон управпенвя, при котором процессы формированвя,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления крутильномотальным механизмом | 1976 |
|
SU565956A1 |
| Устройство для регулирования натяжения ровницы на ровничной машине | 1983 |
|
SU1142537A1 |
| Устройство для управления крутильномотальным механизмом ровничной машины | 1977 |
|
SU699044A1 |
| Устройство для управления крутильно-мотальным механизмом ровничной машины | 1987 |
|
SU1513045A1 |
| РОВНИЧНАЯ МАШИНА | 1966 |
|
SU183106A1 |
| Механизм уменьшения хода ровничной каретки к устройству для управления ровничной машиной | 1976 |
|
SU678098A1 |
| АВТОМАТИЧЕСКОГО НАПУСКА РОВНИЦЫи ЗАВОДКИ в | 1969 |
|
SU234889A1 |
| Механизм замка ровничной машины | 1958 |
|
SU117772A1 |
| Устройство для измерения удлинения ровницы | 1980 |
|
SU938016A1 |
| Механизм намотки ровницы на катушку ровничной машины | 1978 |
|
SU749953A1 |
