(21) 4320025/31-12
(22)26.10.87
() 07.10.89. Бюл. N 37
(71)Московский текстильный институт им. А.Н.Косыгина
(72)М.И.Сапронов и А.Е.Поляков (53) 677.6.052.1(088.8)
(56) Авторское свидетельство .СССР № 699QitA, кл. D 01 Н 1/26, 1977. (5k) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КРУ- ТИЛЬНО-МОТАЛЬНЫМ МЕХАНИЗМОМ РОВНИЧНОЙ
МАШИНЫ
(57) Изобретение относится к средствам управления текстильными машинами. Цель изобретения - повышение точности управления. Устройство содержит привод главного вала 1, кинематически связанный с веретенами-рогульками 2. При включении привода главного вала 1 датчик частоты вращения 17 начинает генерировать импульсы и на выходах управляемого делителя частоты 1б, блока разделения частот и реверсивного счетчика 21 появляются цифровые коды. Реверсивный счетчик 21 через цифроаналоговый преобразователь 22 воздействует на регулятор 7 тока, а преобразователь 18 частоты в напряжение - на регулятор 6 частоты вращения. Привод 11 приемного вала начинает разгоняться. После, завершения пуска машины частоты вращения главного и приемного валов будут одинаковыми. 1 ил.
с
(Л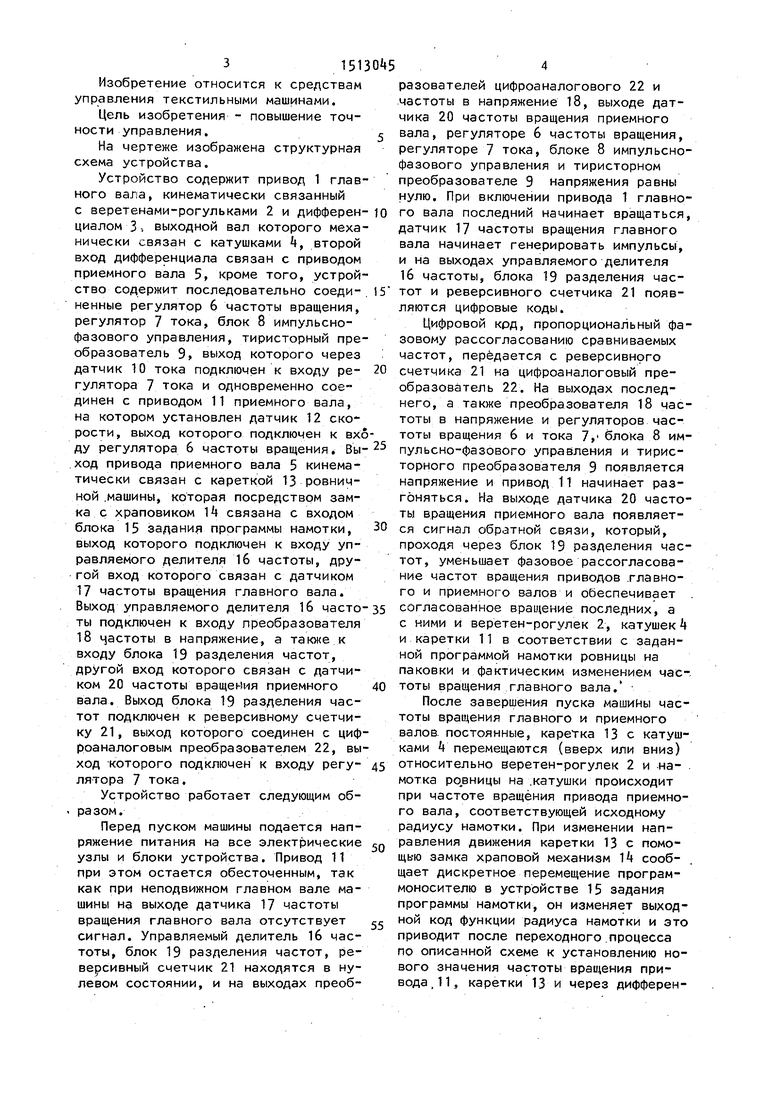
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления крутильномотальным механизмом ровничной машины | 1977 |
|
SU699044A1 |
| Устройство для управления крутильномотальным механизмом | 1976 |
|
SU565956A1 |
| Устройство для управления крутильно-мотальным механизмом ровничной машины | 1979 |
|
SU781229A1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| Крутильно-мотальное устройство рогульчатой ровничной машины | 1990 |
|
SU1747556A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1986 |
|
SU1403332A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
Изобретение относится к средствам управления текстильными машинами. Цель изобретения - повышение точности управления. Устройство содержит привод главного вала 1, кинематически связанный с веретенами-рогульками 2. При включении привода главного вала 1 датчик частоты вращения 17 начинает генерировать импульсы и на выходах управляемого делителя частоты 16, блока разделения частот и реверсивного счетчика 21 появляются цифровые коды. Реверсивный счетчик 21 через цифроаналоговый преобразователь 22 воздействует на регулятор 7 тока, а преобразователь 18 частоты в напряжение - на регулятор 6 частоты вращения. Привод 11 приемного вала начинает разгоняться. После завершения пуска машины частоты вращения главного и приемного валов будут одинаковыми. 1 ил.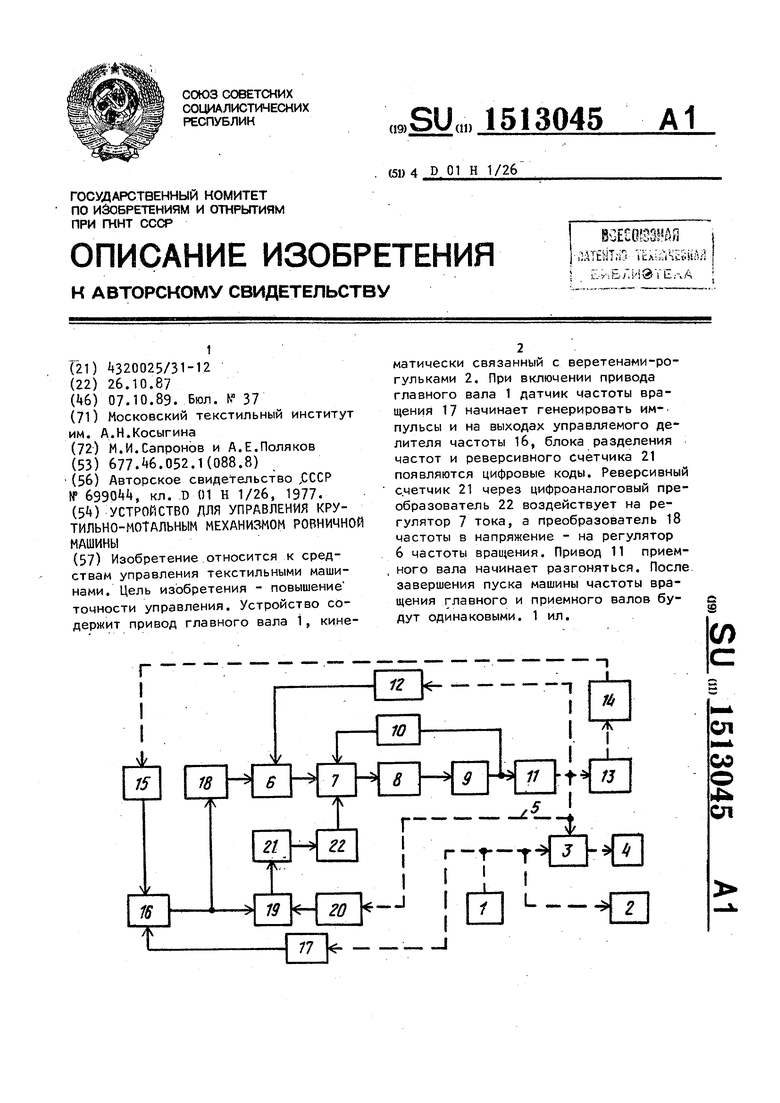
ел
со о
4 СЛ
3 isn
Изобретение относится к средствам управления текстильными машинами.
Цель изобретения - повышение точности управления.
На чертеже изображена структурная схема устройства.
Устройство содержит привод 1 главного вала, кинематически связанный с веретенами-рогульками 2 и дифферен- циалом 3-. выходной вал которого механически связан с катушками k, второй вход дифференциала связан с приводом приемного вала 5, кроме того, устройство содержит последовательно соединенные регулятор 6 частоты вращения, регулятор 7 тока, блок 8 импульсно- фазового управления, тиристорный преобразователь 9, выход которого через датчик 10 тока подключен к входу ре- гулятора 7 тока и одновременно соединен с приводом 11 приемного вала, на котором установлен датчик 12 скорости, выход которого подключен к входу регулятора 6 частоты вращения. Вы- .ход привода приемного вала 5 кинематически связан с кареткой 13 ровничной .машины, которая посредством замка с храповиком 14 связана с входом блока 15 задания программы намотки, выход которого подключен к входу управляемого делителя 16 частоты, другой вход которого связан с датчиком
17частоты вращения главного вала. Выход управляемого делителя 16 часто ты подключен к входу преобразователя
18частоты в напряжение, а также к входу блока 19 разделения частот, другой вход которого связан с датчиком 20 частоты вращения приемного вала. Выход блока 19 разделения частот подключен к реверсивному счетчику 21 , выход которого соединен с циф роаналоговым преобразователем 22, выход которого подключен к входу регу- лятора 7 тока.
Устройство работает следующим об- - разом.
Перед пуском машины подается напряжение питания на все электрические узлы и блоки устройства. Привод 11 при этом остается обесточенным, так как при неподвижном главном вале машины на выходе датчика 17 частоты вращения главного вала отсутствует сигнал. Управляемый делитель 16 частоты, блок 19 разделения частот, реверсивный счетчик 21 находятся в нулевом состоянии, и на выходах преобразователей цифроаналогового 22 и частоты в напряжение 18, выходе датчика 20 частоты вращения приемного вала, регуляторе 6 частоты вращения, регуляторе 7 тока, блоке 8 импульсно- фазового управления и тиристорном преобразователе 9 напряжения равны нулю. При включении привода 1 главного вала последний начинает вращаться, датчик 17 частоты вращения главного вала начинает генерировать импульсы, и на выходах управляемого делителя 1б частоты, блока 19 разделения частот и реверсивного счетчика 21 появляются цифровые коды.
Цифровой крд, пропорциональный фазовому рассогласованию сравниваемых частот, передается с реверсивного счетчика 21 на цифроаналоговый преобразователь 22. На выходах последнего, а также преобразователя 18 частоты в напряжение и регуляторов частоты вращения 6 и тока 7, блока 8 им- пульсно-фазового управления и тирис- торного преобразователя 9 появляется напряжение и привод 11 начинает разгоняться. На выходе датчика 20 частоты вращения приемного вала появляется сигнал обратной связи, который, проходя через блок 19 разделения частот, уменьшает фазовое рассогласование частот вращения приводов .главного и приемного валов и обеспечивает согласованное вращение последних, а с ними и веретен-рогулек 2, катушек k и каретки 11 в соответствии с заданной программой намотки ровницы на паковки и фактическим изменением частоты вращения главного вала,
После завершения пуска машины частоты вращения главного и приемного валов, постоянные, каретка 13 с катушками k перемещаются (вверх или вниз) относительно веретен-рогулек 2 и -на- мотка ро,вницы на .катушки происходит при частоте вращения привода приемного вала, соответствующей исходному радиусу намотки. При изменении направления движения каретки 13 с помо- щь Ю замка храповой механизм Ik сообщает дискретное перемещение программоносителю в устройстве 15 задания программы намотки, он изменяет выходной код функции радиуса намотки и это приводит после переходного .процесса по описанной схеме к установлению нового значения частоты вращения привода , 1 1 , каретки 13 и через дифферен515
циал катушек k в соответствии с новым значением радиуса ровницы на паковки. Далее аналогичные процессы при переходе ровницы на новый слой повторяются по заданной программе намотки. Работа схемы при торможении - машины аналогична процессу пуска с обратным направлением изменения сигналов.
Формула изобретения
Устройство для управления крутиль- но-мотальным механизмом ровничной машины, содержащее датчики частоты вращения главного и приемного-валов, цифроаналоговый преобразователь и блок задания программы намотки, выходом связанный с первым входом управляемого делителя частоты, выход которого соединен с первым входом блока разделения частот, выход которого соединен с входом реверсивного счетчика, и регулятор частоты вращения, выходом связанный с первым вхо- цом регулятора тока, выход которого
56
соединен через блок импульсно-фазово- го управления с входом тиристорного преобразователя, выходом связанного с приводом приемного вала, отличающееся тем, что, с целью повышения точности управления, оно содержит датчики тока и скорости приемного вала и преобразователь частоты в напряжение, причем датчики частоты вращения приемного и главного валов соответственно соединены с вторыми входами блока разделения частот и управляемого делителя частоты, выход которого дополнительно связан через преобразователь частоты в напряжение с первым входом регулятора частоты вращения, второй вход которого соединен с выходом датчика скорости
вращения приемного вала, а выход реверсивного счетчика связан через циф- роаналоговый преобразователь с вторым входом регулятора тока, третий вход которого через датчик тока сое-динен с выходом тиристорного преобразователя.
