1
Изобретение относится к горной про|и1ышленности и в частности к предохранительным устройствам буровых станков вращательного бурения, преимущественно взрывных скважин, а так- же может быть использовано в горном машиностроении, например в дробилках.
Известен амортизатор, включаквдий шток, нажимную втулку, закрепленную иа нем, упругий элемент, состоящий из однотипных тарельчатых пружин, разрезную центрирувадую втулку и опорную траверсу 11.
Основном недостатке этих амортизаторов является их высокая относительная жестксхзть.
Известен также амортизатор для бурового станка, включающий шток с закрепленной на нем нажимной втулкой, упругий элемент, выполненный из секций тарельчатых пружин, разрезную центрирующую втулку и опорную траверсу 2 .
Однако показатели жесткости и долговечности этого амортизатора недостаточно удовлетворительны, поскольку относительно высокая жесткость аморт затора позволяет снижать урдвень
вибрации в среднем лишь в 1,5 раза, а тарельчатые пружины часто выходят -. КЗ строя из-за больших относительных деформаций.
Цель изобретения - снижение жесткости амортизатора и повышение срока его службы.
Указанная цель достигается тем, что пружины,- образующие секции амор10 .тизатора, имеют размеры, связанные соотношением ,D-:d: :/0,45-0,,012-0,025/, ,
где D - наружный диаметр пружин, мм;
15 d - диаметр внутреннего отверстия
пружины, мм; К±-| относительная конусность
пружины;
S - толщина пружины, мм;
20
(JJ - высота конусности пружины,мм;
причем К 1,3-1,6.
Кроме того, может быть принято, что в каждой секции количество пружин с ,3-1,4 больше или равно количеству пружин с ,6.
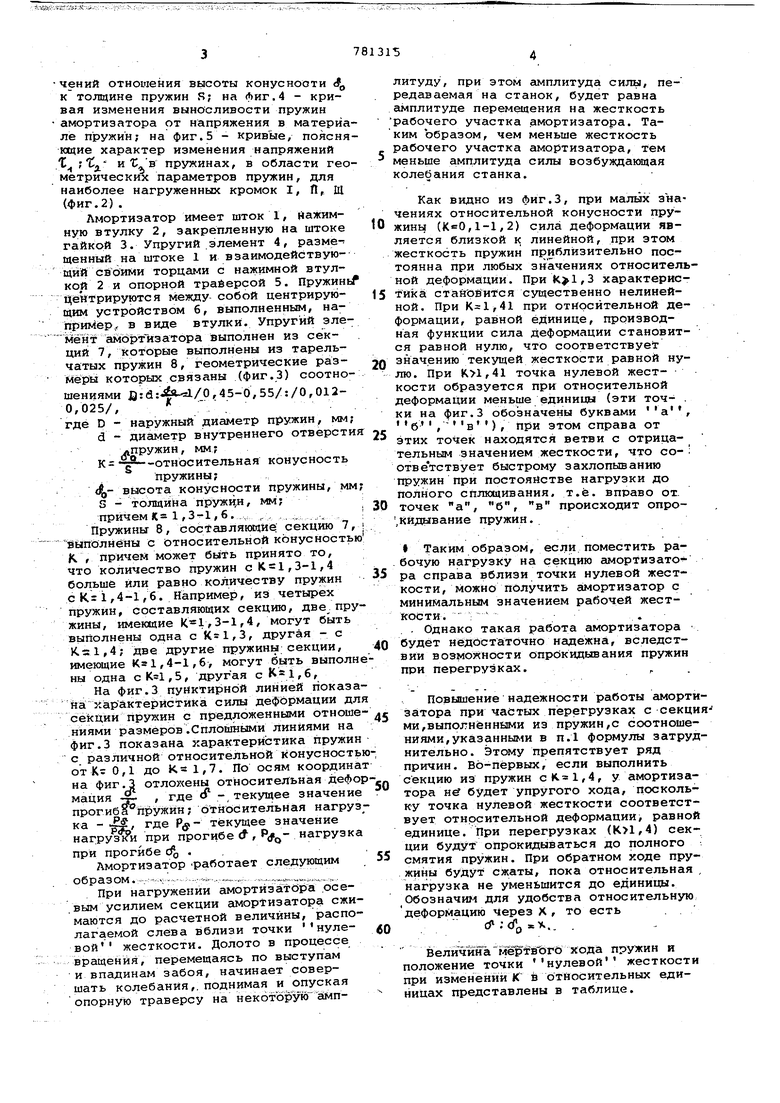
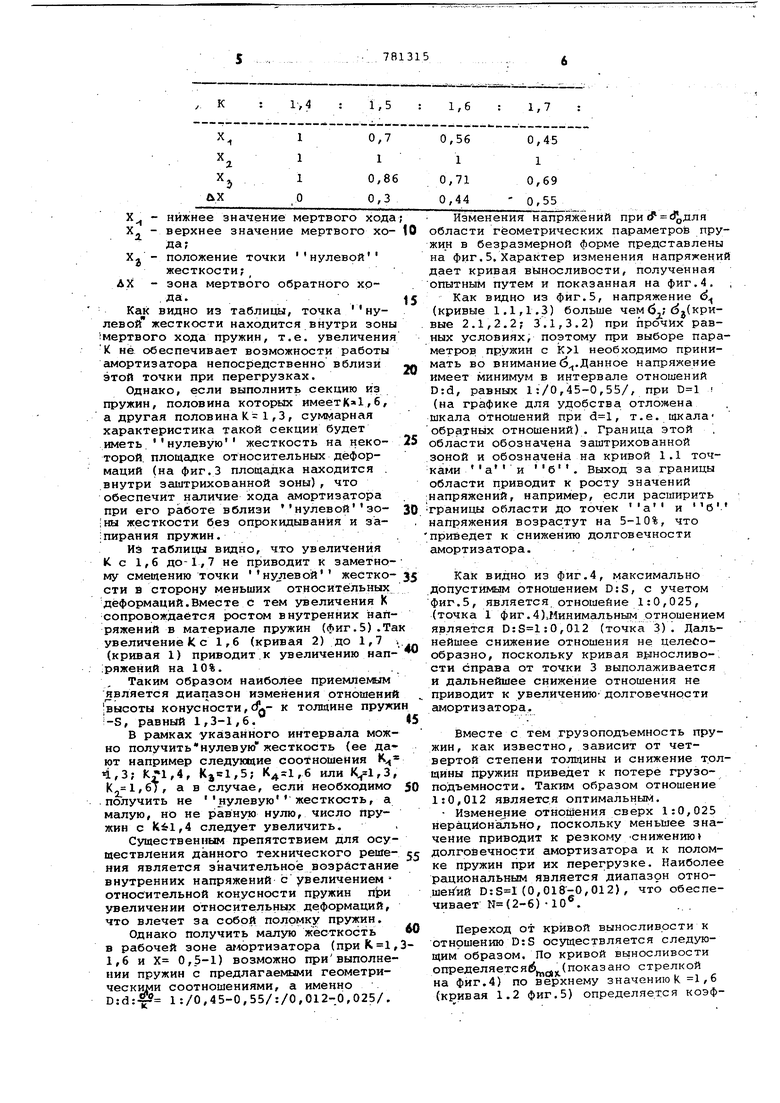
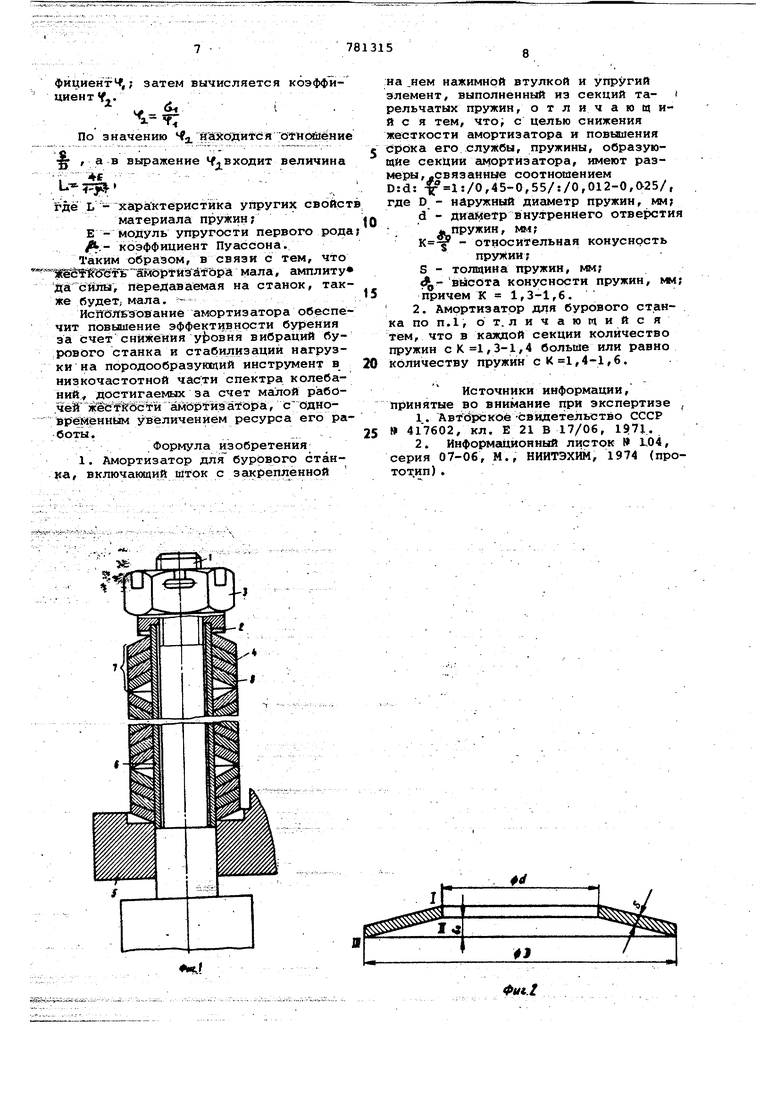
На фиг.1 показан общий .вид амортизатора, разрез; на фиг.2 - пружины, общий вид; на фиг.З - зависимости, сила деформации, для различных значений отношения высоты конуснооти fg к толщине пружин R; на Лиг.4 - кривая изменения выносливости пружин амортизатора от напряжения в материа ле пружин; на фиг.5 - кривые, поясня ющие характер изменения напряжений , и С в пружинах, в области гео метрических параметров пружин, для наиболее нагруженных кромок I, П, Щ (фиг. 2). Лмортизатор имеет шток 1, Иажимную втулку 2, закрепленную На штоке гайкой 3. Упругий .элемент 4, размещенный на штоке 1 и взаимодействующий своими торцами с нажимной втулкой 2 и опорной трайерсой 5. Пружинь центрируются между собой центрирующим устройством б, выполненным, например, в виде втулки. Упругий элемент с1Мбртизатора выполнен из секций 7, которые выполнены из тарельчатых пружин 8, геометрические размеры которых связаны (фиг.З) соотношениями ,45-0,55/:/0,0120,025/, . где D - наружный диаметр пружин, мм; d - Диаметр внутреннего отверсти лпружин, мм; К - -относительная конусность пружины - высота конусности пружины, мм S - толщина пружин, мм; причем К 1,3-1,6. ,, . ....,, Пружины- 8, составляющие; секцию 7, ййполнёны с относительной конусность К г причем может быть принято то, что количество пружин сК 1,3-1,4 больше или равно количеству пружин с ,4-1,6. Например, из четырех пружин, составляющих секцию, жины, имекхцие ,4, могут быть выполнены одна с ,3, другая - с К.1,4; две другие пружины секции, имеющие Кг1,4-1,6, могут быть выполн ны одна cKsl,5, другая сК«1,б, На фиг.З пунктирной линией показа на характеристика силы деформации дл секции пружин с предложенными отноше нйями размеров.Сплошными линиями на фиг.З показана характеристика пружи с различной относительной конусност от К 0,1 до K.S 1,7. По осям координа на фиг.З отложены относительная дефо мация - , где f -.текущее значение прогиба пружин; относительная нагру ка - , где текущее значение наг:рузки при прогибе (f , нагрузк при прогибе с . , Лмортизатор .работает следующим образом.; --;---;----/«-..л- ...-..-.„-«,„..-,.-,,.. При нагружении амортизатора осевым усилием секции амортизатора сжи маются до расчетной величины, распо лагаемой слева вблизи точки нулевой жесткости. Долото в процессе вращения, перемещаясь по выступам и впадинам забоя, начинает совершать колебания,, поднимая и опуская опорную траверсу на некот Йрую амплитуду, при этом амплитуда силы, передаваемая на станок, будет равна амплитуде перемещения на жесткость рабочего участка .амортизатора. Таким образом, чем меньше жесткость рабочего участка амортизатора, тем меньше амплитуда силы возбуждающая колебания станка. Как видно из фиг.З, при малых значениях относительной конусности пружины (КвО,1-1,2) сила деформации является близкой к линейной, при зтом жесткость пружин приблизительно постоянна при любых значениях относительной деформации. ,3 характеристика становится существенно нелинейной. При ,41 при относительной деформации, равной единице, производная функции сила Деформации становится равной нулю, что соответствует знач.ению текущей жесткости равной нулю. При ,41 точка нулевой жесткости образуется при относительной деформации меньше единицы (эти точ- . ки на фиг.З обозначены буквами а, б ,в), при этом справа от этих точек находятся ветви с отрицательным значением жесткости, что соответствует быстрому захлопыванию пружин при постоянстве нагрузки до полного сплющивания, т.е. вправо от. точек а, б, в происходит опро,Кидывание пружин. Таким образом, если поместить рабочую нагрузку на секцию амортизато ра справа вблизи точки нулевой жесткости, можно получить амортизатор с минимальным значением рабочей жесткости. : . Однако такая работа амортизатора будет недостаточно надежна, вследствии возможности опрокидывания пружин ПРИ перегрузках. Повышение надежности работы амортизатора при частых перегрузках с секциями,выполненными из пружин,с соотношениями, указанными в П.1 формулы затруднительно. Этому препятствует ряд причин, во-первых, если выполнить секцию из пружин сК. 1,4, у амортизатора не будет упругого хода, поскольку точка нулевой жесткости соответствует относительной деформации равной единице. При перегрузках (,4) секции будут опрокидываться до полного смятия пружин. При обратном ходе пружины будут сжаты, пока относительная , нагрузка не уменьшится до единицы. Обозначим для удобства относительную деформацию через х, то есть cf .-сГ.х.. . Be личина мёртв-огО хода пружин и положение точки нулевой жесткости при изменений К и относительных единицах представлены в таблице.
К
Г, 4
1,6
1,7
| название | год | авторы | номер документа |
|---|---|---|---|
| Тарельчатая пружина | 1990 |
|
SU1733757A1 |
| Наддолотный амортизатор | 1990 |
|
SU1789648A1 |
| Амортизатор насосной штанговой колонны | 1983 |
|
SU1134692A1 |
| МАЛОГАБАРИТНЫЙ ШПИНДЕЛЬ СЕКЦИОННОГО ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2017 |
|
RU2674485C1 |
| Тарельчатая пружина | 1989 |
|
SU1652693A1 |
| БУРОВОЙ АКСЕЛЕРАТОР ДЛЯ УСИЛЕНИЯ УДАРА БУРИЛЬНОГО ЯСА | 2014 |
|
RU2571961C1 |
| Амортизатор насосной штанговой колонны | 1981 |
|
SU977684A1 |
| Амортизатор | 1977 |
|
SU932002A2 |
| АДАПТИВНАЯ ЦИЛИНДРИЧЕСКАЯ ПЕРЕДАЧА С АРОЧНЫМИ ЗУБЬЯМИ | 2019 |
|
RU2721579C1 |
| Шарнир универсального шпинделя | 1986 |
|
SU1315060A1 |
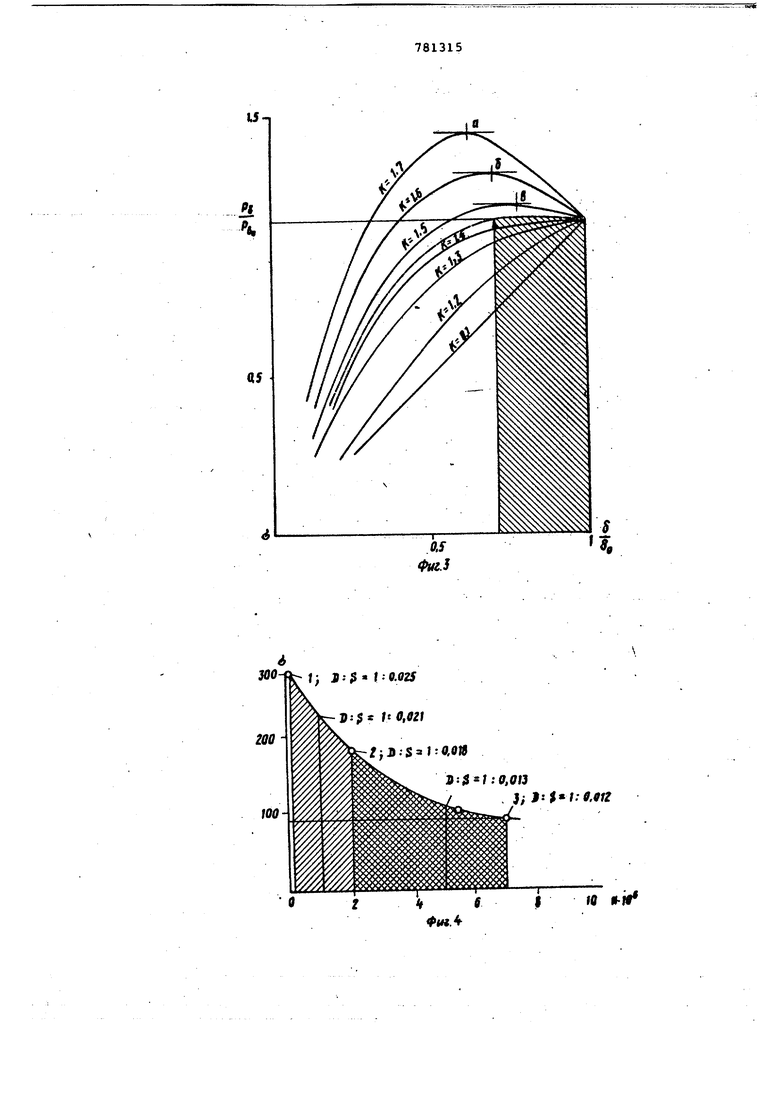

Х - нижнее значение мертвого хода X,j - верхнее значение мертвого хода;Xj - положение точки нулевой жесткости; ДХ - зона мертвого обратного хрКак видно из таблицы, точка нулевой жесткости находится внутри зоны мертвого хода пружин, т.е. увеличения К не обеспечивает возможности работы амортизатора непосредственно вблизи этой точки при перегрузках. Однако, если выполнить секцию из пружин, половина которых имеетК «1,б, а другая половина К 1,3, суммарная характеристика такой секции будет иметь.нулевую жесткость на некоторой, площадке относительных деформаций (на фиг.З площадка находится . внутри заштрихованной зоны), что обеспечит наличие хода амортизатора при его работе вблизи нулевойзоны жесткости без опрокидывания и за;пирания пружин. Из таблицы видно, что увеличения К с 1,6 до-1,7 не приводит к заметному смещению точки нулевой жесткости в сторону меньших относительных деформаций.Вместе с тем увеличения К сопровождается ростом внутренних напряжений в материале пружин (фиг.З).Та увеличение К с 1,6 (кривая 2) до 1,7 (кривая 1) приводит к увеличению нап:ряжений на 10%.. Таким образом наиболее приемлеглим является диапазон изменения отношений :высоты конусности, cftj- к толщине пруж -S, равный 1,3-1,6. В рамках указанного интервала можно получить нулевую жесткость (ее дают например следующие соотношения К 4,3; ,4, Kjel,5; ,6 ,3 ,6), а в случае, если необходимо получить не нулевую жесткость, а малую, но не равную кулю, число пружин с К61,4 следует увеличить. Существенным препятствием для осуществления данного технического решеНИН является значительное возрастание внутренних напряжений с увеличением относительной конусности пружин при увеличении относительных деформаций, что влечет за собой поломку пружин. Однако получить малую ж есткость в рабочей зоне амортизатора (при , 1,6 и Х 0,5-1) возможно привыполнении пружин с предлагаемыми геометрическими соотношениями, а именно D:d:Jp 1:/0,45-0,55/:/0,012-.0,025/. изменения напряжений ,для области геометрических параи 1етро1з пружин в безразмерной форме представлены на Фиг.5. Характер изменения напряжений дает кривая выносливости, полученная ОПЫТНЫМ путем и показанная на фиг.4. Как видно из фиг.5, напряжение d (кривые 1.1,1.3) больше чем6.; dj(кривые 2.1,2.2; 3.1,3.2) при прочих равных условиях, поэтому при выборе параметров пружин с необходимо принимать во внимание(5..Данное напряжение имеет минимум в интервале отношений D:d, равных 1:/0,45-0,55/, при (на графике для удобства отложена шкала отношений при , т.е. щкалаобратных отношений). Граница этой области обозначена заштрихованной зоной и обозначена на кривой 1.1 точВыход за границы области приводит к росту значений напряжений, например, если расширить Границы области До точек напряжения возрастут на 5-10%, что приведет к снижению долговечности амортизатора. . Как видно из фиг.4, максимально допустимым отношением D:S, с учетом фиг.5, является отношейие 1:0,025, (точка 1 фиг.4)Линимальным отношением является ,012 (точка 3). Дальнейшее снижение отношения не целесообразно, поскольку кривая в{лносливости справа от точки 3 выполаживается и дальнейшее снижение отношения не приводит к увеличению-долговечности амортизатора. Вместе с тем грузоподъемность пружин, как известно, зависит от четвертой степени толщины и снижение т.олщины пружин приведет к потере грузоподъемности. Таким образом отношение 1:0,012 является оптимальным. Кзмененке отнойения сверх 1:0,025 нерационально, поскольку меньшее значение приводит к резкому/снижению долговечности амортизатора и к поломке пружин при их перегрузке. Наиболее рациональным является диапазон отношег кК (0,018-0,012), что обеспечивает N(2-6)-10®. Переход от кривой выносливости к отношению 0:3 осуществляется следующим образом. По кривой выносливости определяетеяй д,1(показано стрелкой на фиг.4) по верхнему значениюk 1,6 (кривая 1.2 фиг.5) определяется коэффйциенгЧ,; затем вычисляется коэффициент f. По значению f н йХоднтся ;О1:май1ёни g /а в выражение ЧЛ БХОДИТ величина -; е . . i . ,, где L - характёристйка упругих свойс материала пружин; Е - модуль упругости первого род /Ь,- коэффициент Пуассона. Таким О1бразом, в связи с тем, что -Ше ШГь 1йдртйзйтор а мала, амплиту да сияй. Передаваемая на станок, так же будет, мала. Иснеябзование амортизатора обеспе чит повышение эффективности бурения за счет снижения уровня вибраций бурового станка и стабилизации нагрузки на породообразующий инструмент в низкочастотной час;ти спектра колебаний« достигаемых за счет малой рабо.чей )к1ё1йгШ и Шбр йэатЪ1 а, с ОДйоврейенм1лм увеличением ресурса его ра боты. . Формула изобретения 1. Амортизатор для бурового станка, включающий шток с закрепленной на нем нажимной втулкой и упругий элемент, выполненный из секций тарельчатых пружин, отличающийся тем, что; с целью снижения жесткости амортизатора и повышения Срока его службы, пружины, образующие секции амортизатора, имеют раз(Связанные соотношением меры, -1:/0,45-0,55/:/0,012-0,а25/, D:d: где D - наружный диаметр пружин, мм; d - диаметр внутреннего отве хгтия - пружин, К - относительная конусность пружии; S - толщина пружин, мм; JJ,- высота конусности пружин, причем К 1,3-1,6. 2. Амортизатор для бурового станка по п. 1, о т. л и ч а ю щ и и с я тем, что в каждой секции количество пружин с К 1,3-1,4 больше или равно количеству пружин с К 1,4-1,6. Источники информации, принятые во внимание при экспертизе , 1.Автйрское -свидетельство СССР 417602, кл. Е 21 В 17/06, 1971. 2.Информационный листок ( , серия 07-06, М., НИИТЭХЙМ, 1974 (протот.ип) .
tf
ФЛ
f; J): -9.025
P:$« bO,9Z
.-s i:fte
В :;.-0,013
, J;
a -i
-iffff
-so
