(54) СЛЕДЯПУШ СИСТЕМА
1
Изобретение относится к области электропривода и может быть исполь- . зовано, например, для привода конвейеров .
Известна система электрического вала с уравнительными асинхронными машинами, содержащая главные двигатели, связанные валами с уравнительными асинхронными двигателями, роторные кольца которых соединены между собой 1 .
Недостатком известной системы является большая величина динамической составляющей угла рассогласования электрического вала при изменении статической нагрузки на одном из двигателей.
Наиболее близка по технической сущности к предлагаемой - система, . содержащая два главньах асинхронных двигателя, два вспомогательных асинхронных двигателя, роторные обмотки которых электрически .сЪединены между собой и со входами датчика угла скручивания валов 2 .
Недостаток известной системы элект| ического вала заключается в том, что инерционность системы управления поворотным статором не позволяет существенно уменьшить угол рассоглаI I . I
сования в динамике в момент изменения статичес кой нагрузки на одном из главных двигателей, что приводит к большим величинам динамической составляющей угла рассогласования.
Кроме того, система требует специального изготовления одной из вспомогательных асинхронных машин с поворотным статором и дополнительной
10 электромеханической системой управления положением статора.
Цель предлагаемого изобретения повышение точности сйстёмй.
Поставленная цель достигается
t5 тем, что известная система снабжена блоками торможения и последовательно соединенными дифференцирующим усилителем и логическим блоком, причем выход датчика угла скручивания валов
20 соединен со входом дифференцирующего усилителя, а первый и второй выходы логического блока соединены с входами соответствующих блоков торможения, а также тем, что датчик угла скручивания валов содержит трансформатор тока, первичная обмотка которого подключена к первому и второму входам датчика угла скручивания валов, а вторичная обмотка подключена к одному
30 из входов фазочувствитёльного выпрямительного устройства, другой вход которого соединен с вторичной обмоткой трансформатора напряжения, первичная обмотка которого подключена к третьему и четвертому входам датчика угла скручивания валов, и, кроме того, тем, что, логический блок соержит инвертирующий усилитель и два последовательно соединенных диода, точка соединения которых подключена ко входу логического блока, анод первого диода соединен со входом инвертирующего усилителя, выход которого соединен с первым выходом логического блока, а катод другого диода соединен со вторым выходом логического блока.
На чертеже представлена блок-схема следящей системы..
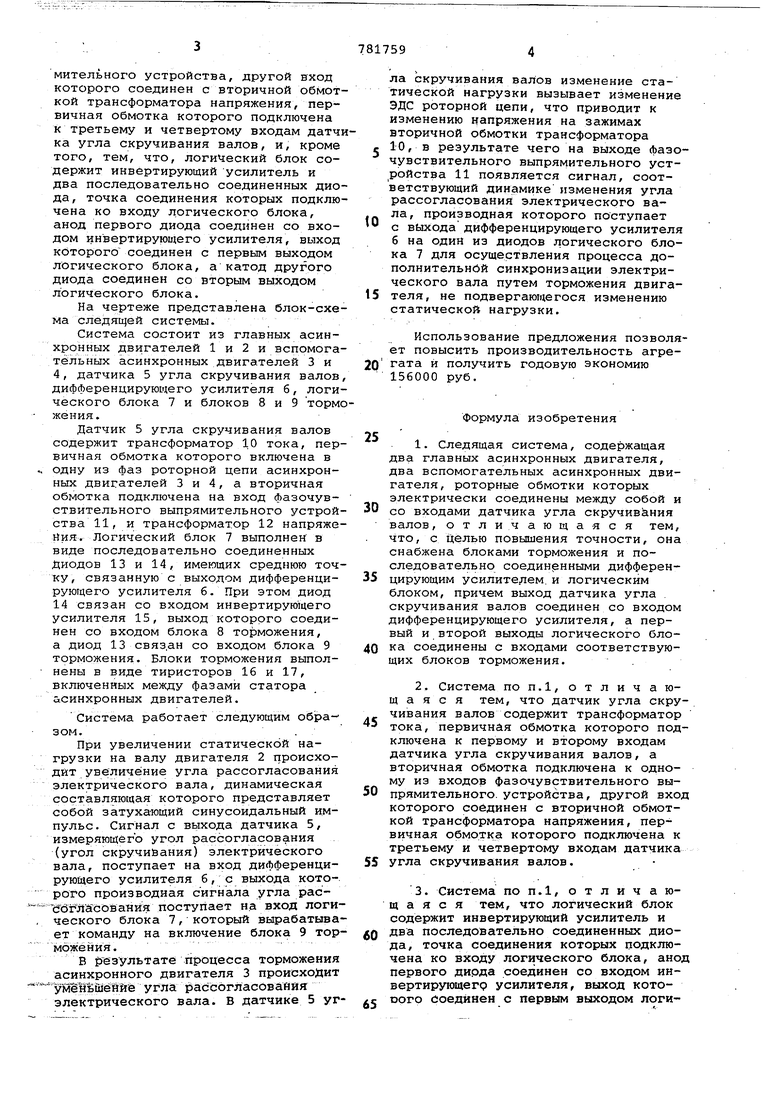
Система состоит из главных асинхронных двигателей 1 и 2 и вспомогательных асинхронных двигателей 3 и 4, датчика 5 угла скручивания валов, дифференцирующего усилителя б, логического блока 7 и блоков 8 и 9 торможения.
Датчик 5 угла скручивания валов содержит трансформатор 10 тока, первичная обмотка которого включена в одну из фаз роторной цепи асинхронных двигателей 3 и 4, а вторичная обмотка подключена на вход фазочувствительного выпрямительного устройства 11, и трансформатор 12 напряжения. Логический блок 7 выполнен в виде последовательно соединенных Диодов 13 и 14, имеющих среднюю точку, связанную с выходом дифференцирующего усилителя б. При этом диод 14 связан со входом инвертирующего усилителя 15, выход которого соединен со входом блока 8 торможения, а диод 13 связ.ан со входом блока 9 торможения. Блоки торможения выполнены в виде тиристоров 16 и 17, включенных между фазами статора асинхронных двигателей.
Система работает следующим образом. ..
При увеличении статической нагрузки на валу двигателя 2 происходит уве;личёние угла рассогласования: электрического вала, динамическая составляющая которого представляет собой затухающий синусоидальный импульс. Сигнал с выхода датчика 5, измеряющего угол рассогласования (угол скручийания) электрического вала, поступает на вход дифференцирующего усилителя б, с выхода кото-, pofo производная сигнала угла рассбгЖасованйя поступает на вход логического блока 7, который вырабатывает команду на включение блока 9 торможёния.
В р езультате процесса торможения асинхронного двигателя 3 происходит уШн Шёййё угла рассогласоваййя электрического вала. В датчике 5 угла скручивания валов изменение статической нагрузки вызывает изменение ЭДС роторной цепи, что приводит к изменению напряжения на зажимах вторичной обмотки трансформатора 10, в результате чего на выходе фазочувствительного выпрямительного устройства 11 появляется сигнал, соответствующий динамике изменения угла рассогласования электрического вала, производная которого поступает с выхода дифференцирующего усилителя б на один из диодов логического блока 7 для осуществления процесса дополнительнйй синхронизации электрического вала путем торможения двигателя, не подвергающегося изменению статической нагрузки.
Использование предложения позволяет повысить производительность агрегата и получить годовую экономию 156000 руб.
Формула: изобретения
1.Следящая система, содержащая два главных асинхронных двигателя, два вспомогательных асинхронных двигателя, роторные обмотки которых электрически соединены между собой и со входами датчика угла скручивания валов, отличающаяся тем, что, с целью повышения точности, она снабжена блоками торможения и последовательно соединенными дифференцирующим усилите-лем. и логическим блоком, причем выход датчика угла скручивания валов соединен со входом дифференцирующего усилителя, а первый и второй выходы логического блока соединены с входами соответствующих блоков торможения.
2.Система поп.1, отличающаяся тем, что датчик угла скручивания валов содержит трансформатор тока, первичная обмотка которого подключена к первому и второму входам датчика угла скручивания валов, а вторичная обмотка подключена к одному из входов фазочувствительного выпрямительного, устройства, другой вхо которого соединен с вторичной обмоткой трансформатора напряжения, первичная обмотка которого подключена к третьему и четвертому входам датчика угла скручивания валов.
3.Система по п.1, отличающая с я тем, что логический блок содержит инвертирующий усилитель и два последовательно соединенных диода, точка соединения которых подключена ко входу логического блока, ано первого дирда соединен со входом инвертирующегр усилителя, выход котоDoro с5оедйнен с первым выходом логического блока, а катод другого диода соединен со вторым выходом логического блока.
Источники информации, принятые во внимание при экспертизе
1.Основы автоматизированног.1 электропривода. Под ред. Чиликина М1Г. V М., Машиностроение, 1974, с.141.
2.Авторское свидетельство СССР W 137156, кл. Н 02 Р 7/78, I960
(прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| Устройство для моделирования энергосистем | 1978 |
|
SU763923A1 |
| СПОСОБ ПОСТРОЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ МОСТОВЫМ ВЫПРЯМИТЕЛЕМ И ТРЕХФАЗНЫМ РЕГУЛЯТОРОМ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2658312C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Способ управления тиристорным электроприводом постоянного тока транспортного средства | 1987 |
|
SU1415397A1 |
| Двухдвигательный электропривод | 1985 |
|
SU1277349A1 |
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
