соединенными валами, статорные обмотки которых подключены к соответствующим энергосистемам, а роторные обмотки каждой машины через управляемый преобразователь частоты подключен к выходу своего регулятора, содержащего пять входов, первый и второй из которых соответственно является входами канала регулирования напряжения и канала регулирования электромагнитного момента на валу, третий вход соединен с датчиком углового положения и частоты вращения вала, четвертый вход - с датчиками тока обмотки ротора, а пятый вход соединен с датчиком частоты своей энергосистемы, при этом входы указанных каналов обоих регуляторов через свой суммирующий элемент соединены с выходами соответствующих задатчиков сигнала управления и усиливающего, дифференцирующего и интегрирующего элементов, входы усиливающих, дифференцирующих и интегрирующих элементов каналов регулирования напряжения обоих регуляторов соединены со своими задатчиками уставки напряжения и датчиками напряжения, входы усиливающего, дифференцирующего и интегрирующего элементов канала регулирования электромагнитного момента первого регулятора соединены с датчиком частот объединяемых энергосистем и датчиком углового положения и частоты вращения вала машины, выход блока управления соединен с четвертым входом интегрирующего элемента канала регулирования электромагнитного момента первого регулятора, при этом блок управления содержит два задатчика уровня, два сумматора, два диода и один усилитель, выход блока управления соединен с первыми входами сумматоров, вторые входы которых соединены с задатчиками уровня, а выходы через диоды соединены с входами усилителя, выход которого образует выход блока управления, о тличающееся тем, что, с целью повьшения устойчивости, входы суммирующего элемента канала регулирования электромагнитного момента второго регулятора соединены с выходами усиливающего, дифференцирующего и интегрирующего элементов канала регулирования электромагнитного момента первого регулятора, вход блока управления соединен с выходом последнего дифференцирующего элемента, а задатчик уровня блока управления вьшолнен как задатчик уровня производной скольжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1575262A2 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1504720A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
1. Устройство для связи двух энергосистем, содержащее две асинхронные синхронные машины с жестко соединенными валами, статорные обмотки которых подключены к соответствующим энергосистемам, а роторные обмотки каждой машины через управляемый преобразователь частоты подключены к выходу своего регулятора, содержащего пять входов, первый и второй из которых соответственно являются входами канала регулирования напряжения и канала регулирования электромагнитного момента на валу, третий вход соединен с датчиком углового положения и частоты вращения вала, четвертый вход - с датчиком тока обмотки ротора, а пятый вход соединен с датчиком частоты своей энергосистемы, при этом входы указанных каналов обоих регуляторов через свой суммирующий элемент соединены с выходами соответствующих задатчиков сигнала управления и усиливающего, дифференцирующего и интегрирующего элементов, входы усиливающих, дифференцирующих,и интегрирующих элементов каналов регулирования напряжения обоих регуляторов соединены со своими задатчиками уставки напряжения и датчиками напряжения, входы усил11вающего, дифференцирующего и интегрирующего элементов канала регулирования электромагнитного момента первого регулятора соединены с датчиками частот объединяемых энергосистем и датчиком углового положения и частоты вращения вала машин, выход блока Управления соединен с четвертым входом по крайней мере одного из интегрирующих элементов каналов регулирования электромагнитного момента, при этом блок управления содержит два задатчика уровня, два сумматора, два диода и один усилитель, вход блока управления соединен с первыми входами сумматоров, вторые входы которых соединены с задатчиками уровня, а выходы через диоды соединены с вхо-. дами усилителя, выход которого образует выход блока управления, отличающееся тем, что, с целью, повышения устойчивости, входы усиливающего, дифференцирующего и интегрирующего элементов канала регулирования электромагнитного момента второго регулятора соединены с датчиками частот объединяемых энергосистем и датчиком углового положения и частоты вращения вала, вход блока управления соединен с выходом дифференцирующего элемента канала регулирования электромагнитного момента одного из регуляторов, а задатчик уровня блока управления вьшолнен как задатчик уровня производной скольжения, 2. Устройство для связи двух энергосистем, содержащее две асинхрони- зированные синхронные машины с жестко fi (Л с 4i bo Oi
1
Изобретение относится к электротехнике, в частности, к передаче электрической .чнергии по линиям переменного тока, более конкретно к электромеханическим преобразователям частоты для гибкой связи энергосистем с различающимися частотами.
. Цель изобретения - повышение устойчивости энергообъединения двух энергосистем.
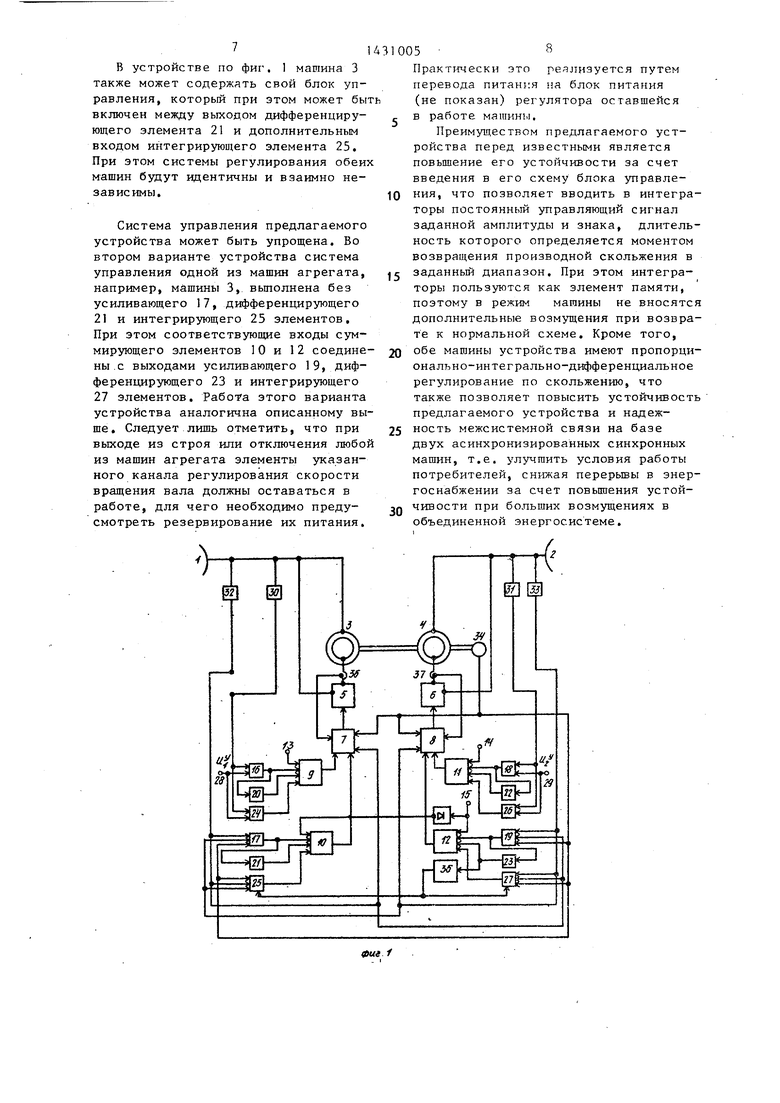
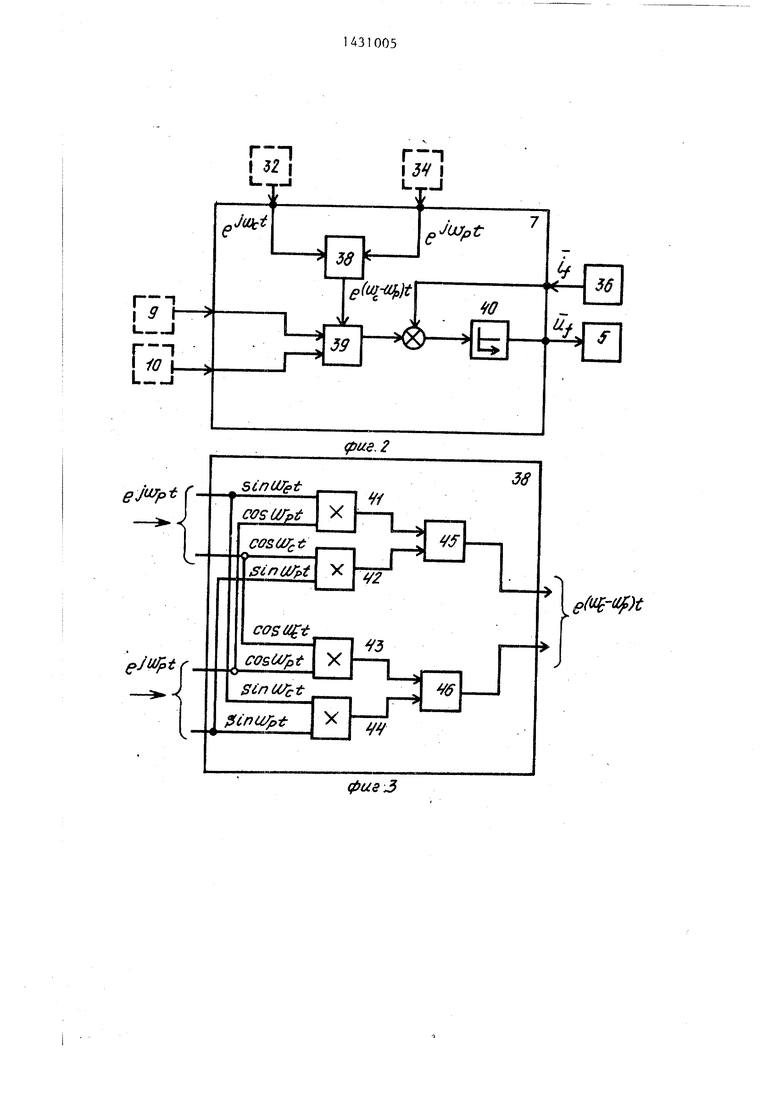
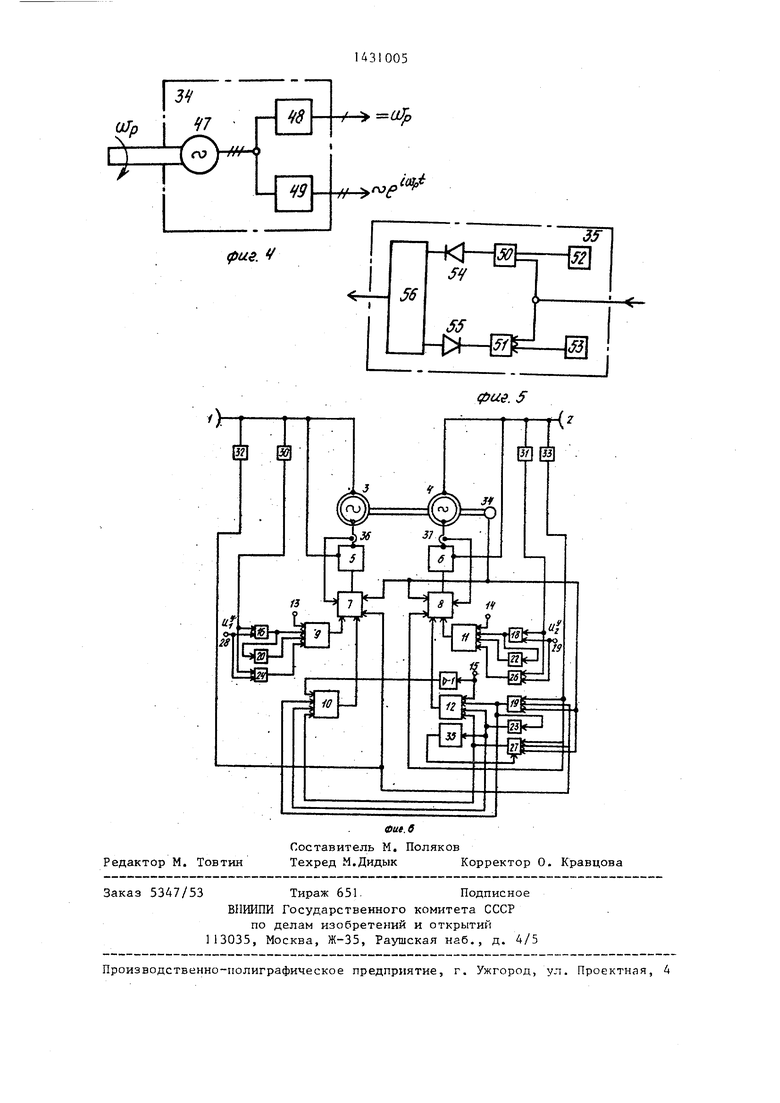
На фиг о 1 представлена схема предлагаемого устройства; на фиг. 2 - схема регулятора; на фиг. 3 - схема преобразователя координат; на фиг . 4- схема датчика углового положения и частота вращения вала; на фиг. 5 - схема блока управления; на фиг. 6- вариант схемы предлагаемого устройства.
Устройство для связи энергосистем 1 и 2 состоит из асинхронизированных синхронных машин 3 и А с жестко соединенными валами, статорные обмотки
которых подключены к соответствующим энергосистемам, а роторные обмотки через управляемые преобразователи частоты 5 и 6 подключены к выходам
соответственно регуляторов 7 и 8, Первый .и второй выходы регуляторов 7 и 8 являются входами канала регулирования напряжения и канала регулирования электромагнитного момента на
с валу и соответственно через суммирующие элементы 9, 10 и 11, 12 соединены со своими задатчиками 13, 14 и 15 сигнала управления и соответственно с усиливающими элементами 16, 17 и 18, 19 дифференцирующими элемента-
ми 20, 21 :: 22, 23, интегрирующими элементами 24, 25 и 26, 27. Задатчик 15 вьтолнен с основным и дополнительным инвертирующим выходами. При этом основной выход соединен с входом сум мирующего элемента 12, а дополнительный инвертирующий выход - с входом суммирующего элемента 1.0. На фиг. 1 дополнительный инвертирующий выход эадатчика 15 показан условно в виде инвертора. Выходы усиливающих 16 и 18, дифференцирующих 20 и 22, интегрирующих 24 и 26 элементов первых входов регуляторов 7 и 8 соединены соответственно со своими задатчиками 28 и 29 уставки напряжения и датчиками 30 и 31 напряжения шин. Входы усиливающих 17 и 19, дифференцирующих 21 и 23 и интегрирующих 25 и 27 элементов вторых входов регуляторов 7 и 8 соединены с датчиками 32 и 33 частот объединяемых энергосистем 1 и 2 и с датчиком 34 углового положения и частоты вращения вала машин 3 и 4. Вход блока 35 управления соединен с выходом дифференцирующего элеме.нта 23, а выход соединен с дополнительными входами интегрирующих элементов 25 и 27.
Третьи входы регуляторов 7 и 8 соединены с датчиком 34 углового положения и частоты вращения вала, а четвертые входы - с датчиками 36 и 37 токов роторов соответственно машин 4 и 3, а пятые входы - с датчиками частот 32 и 33 энергосистем 1,2.
На фиг, 2,3,4 и 5 приведены примеры выполнения известных элементов устройства. На фиг. 2 показана схема регулятора 7 (или 8), который содержит блоки 38 и 39 преобразования координат. Гармонические сигналы управления частоты скольжения машины, получаемые на выходе блока 39, совмест но с сигналом обратной связи по току ротора (от датчика 36) поступают на вход усилителя 40, на выход которого формируется сигнал напряжения возбуждения.
Выполнение блоков 38 и 39 преобразования координат одинаково.(фиг. 3) Они содержат блоки 41-44 произведения и сумматоры 45-46. Связи между элементами и функциональное назначе- ние этих элементов очевидны из приведенных схем. На фиг. 4 показана : схема . датчика 34 углового положе
г
10
15
20
25
43
-
, 55
30
35
40
45
0054
ния и частоты вращения вала, содержащего синхронный тахогенератор 47, вьшоды которого соединены с выпрямительным блоком 48, на выходе которого получают сигналы, пропорциональные частоте (скорости) вращения вала, и с блоком 49 пассивных интеграторов (RC-цепочки), на выходе которого получают гармонические сигналы - практически постоянной амплитуды об угловом положении вала.
На фиг. 5 показана схема блока 35 управления. Вход блока 35 управления соединен с первыми входами двух сумматоров 50 и 51, вторые входы которых соединены соответственно с задатчиками 52 и 53 уровня производной скольжения, а выходы через диоды 54 и 55 соединены с входами усилителя 56, например операционного, выход которого соединен с выходом блока 35 управления. Задатчики 52 и 53 продставляют собой, например, регулируемые потенциометры с источником постоянного напряжении. При работе устройства элементы 16,20,24 и 18,22,26 обеспечивают пропорциональ- но-интегрально-дифференциальное регулирование напряжений на статорах машин 3 и 4. Задатчик 15 сигнала управления обеспечивает задание на поток, активной мощности через линию электропередачи с предлагаемым устройством. Элементы 17,21,25 и 19,23,
.27 реализуют пропорционально-интегрально-дифференциальное регулирование скорости (Частоты) вращения вала агрегата. При этом задание (уставка) формируется по сигналам датчиков 32 и 33 как полусумма частот объединяемых энергосистем, что позволяет обеспечить наибольшее использование управляемых преобразователей 5 и 6. Выход задатчика 15 соединен с входом суммирующего элемента 12, а через инвертор - с входом суммирующего элемента 10. Поэтому при работе устройства сигналы, поступающие на указанные входы суммирующих элементов 10 и 12, имеют различные знаки и
.этим определяют, что одна машина агрегата работает генератором, а другая - двигателем. Величина этих сигналов определяет величину передаваемой через устройство активной мощности. Известно, что при поддержании постоянного напряжения на шинах машин при постоянстве сигнала в канале
514
активной мощности электромагнитный момент MaDJHHbi не зависит от частоты энергосистемы. Это позволяет оценить по известной формуле Р соМ (Р - активная мопшость машины, со - частота энергосистемы, М - электромагнитный момент машины) величины изменения мощности межсистемной передачи при изменениях частоты. Так для машины мощности 2000 МВт при изменении частоты сети на 1 - 1,5 Гц мощность перетока изменится на 4-6 МВт, т.е. на 2-3%.
Следует отметить, что в соответствии с ГОСТ 183-66 установившимся режимом для электрическшс машин считается режим с отклонением от задания на 3%. Очевидно, что 2-3% отклонения мощности укладьюается в требование ГОСТ, поэтому в устройстве можно отказаться от регулирования активной мощности. В свою очередь, это позволяет идентифицировать регуляторы машин устройства, что имеет эксплуатационное преимущество, и повысить устойчивость. Повьшгение устойчивости достигается благодаря тому, что обе машины управляются по скольжению. Поэтому, например, при коротких замыканиях и отключениях линий связи с энергосистемой отпадает необходимость перестройки структуры регулятора оставшейся в работе машины агрегата. При этом, если возмещение большое и при заданной оптимальной настройке коэффициентов регулировани усиливающих, дифференцирующих и ин- тегрирзтощих элементов скорость машины может выйти за допустимый диапазон, в действие вступает дополнительное регулирование с помощью блока 35 управления, который по оценке величины производной скольжения выявляет указанное большое возмущение. При больших возмущениях в энергосистеме 2, например отклонения линии или 3-фазном коротком замыкании, приводящих к тому, что электромагнитный момент машины Д падает до нуля, агрегат начинает разгоняться или тормозиться в зависимости от того, работала машина 3 в доаварийном режиме, соответственно в двигательном или генераторном режиме. При разгоне или то р можении продифференцированный в менте 23 разностный сигнал между установкой и истинной скоростью вращения вала (т.е. сигнал производной
0
5
0056
скольжения) поступает (фиг. 5) на сумматоры 50 и 51, работающие в ко м- параторном режиме. При этом если этот сигнал больше значения, определяемого задатчиками уровня производной скольжения 52 и 53, на выходе одного из сумматоров 50 и 51 вырабатьшается ч;игнал заданной амплитуды и полярности. Этот сигнал через диод, например 54 и усилитель 56, служащий для усиления сигналов и развязки выходов сумматоров 50 и 51, поступает на интеграторы 25 и 27. Интеграторы 25 и 27 интегрируют этот сигнал большой амплитуды и, например, тормозят машину 3.
Как только производная скольжения войдет в диапазон, определяемый задатчиками- 52 и 53, сигнал с выхода сумматора 56 исчезает и устройство восстанавливает режим агрегата по скольжению.
При этом, как указывалось выше, устойчивость агрегата сохраняется благодаря пропорционально-интеграль- но-дифференциальному регулированию элементами 17, 21 и 25. Как только устранится (после успешного АПВ) возмущение и линия электропередачи восстановится, асинхронизированные синхронные машины реализуют пропорционально-интегрально-дифференциальноерегулирование по скольжению совместно с дополнительным управляющим сигналом большой амплитуды от блока 35 управления. Это позволяет устройству войти в нормальный по нагрузке режим, не выходя из диапазона сколь0
5
жения, существенно быстрее, чем в устройстве-прототипе. Достигается это тем, что при коротких замыканиях или отключениях линии электропередачи производная скольжения меняется сразу же, поэтому блок 35 управления свой дополнительный управляющий сигнал формирует также сразу в начале возмупдения, а не через какое-то время, как в устройстве-прототипе. На фиг. 1 задатчик 15 сигнала управления
показан выполненным общим с прямым и инвертирующим выходами, но каждая машина может иметь свпй задатчик сигнала управления. Задатчики 13, 14 и 15 сигналов управления выполнены,
например, как источники .калиброванного напряжения с последовательно соединенными регулируемым потенциометром.
sinutfet COSUTp
С05Шс SinU/pt
X
COs(f SinOTct , inWpt
pue.2
38
V/
ff()t
5
4гг
i/
фиаЗ
У-
Л
J
. S
| Устройство для обьединения энергосистем | 1974 |
|
SU502445A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 762087, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
