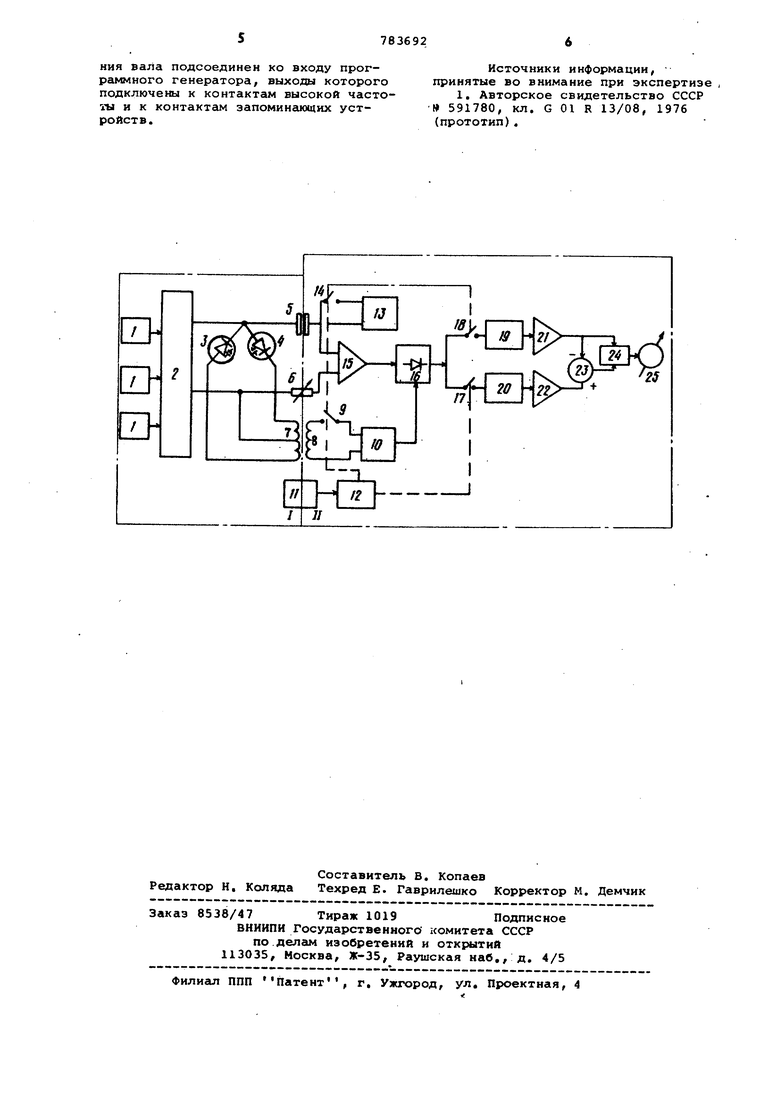
Изобретение относится к измерительной технике и может быть использовано для измерения различных параметров, например температуры, деформации, давления, элементов машин при их вращательном движении. По основному авт. ев, 591780 известно устройство для измерения параметров вращающихся элементов машин, состоящее из установленного на вращающейся детали подвижного блока, содержащего последовательно соединенные датчики, коммутатор, варикапно-индуктивный мост, неподвижного блока, содержащего генератор высокой частоты, последовательно соединенные усилительно-преобразовательный узел и регистрирующее устройство, генератор высокой частоты напряжения накачки варикапно-индуктивного моста, связанный с ним через вращакедийся трансформатор. Выход варикапно-индук тивного моста связан с усилительнопреобразовательным узлом посредством вращающегося конденсатора. Генератор низкой частоты, входящий в состав неподвижного блока, соединенный со входом усилительнопреобразовательного узла, оказываетс одновременно включенным в сигнальную диагональ, управляемую диагональю варикапно-индуктивного моста, что позволяет калибровать всю измерительную линию в процессе проведения измерения 1. В таком устройстве сигнал калибровки суммируется с полезным сигналом, и поуррвню первого, на выходе измерительной линии, может быть произведена расшифровка второго. Недостатком известного устройства является низкая точность измерения, которая обусловлена тем, что в устройстве не учитывается сдвиг нуля измерительной цепи, что приводит к значительным погрешностям при измерении статических процессов какими, например, являются такие параметры, как температура, давление и статические деформации. Целью изобретения является повышение точности измерений. Поставленная цель достигается за счет того, что в устройство введены датчик положения вала, nporpaiMмный генератор, а между синхронным демодулятором и регистратором через контакты включены запоминающие.устройства, соединенные последовательно с усилителякга, подключенными ко входам дифференциального усилителя и измеритель отношения сигналов, один вход которого подключен к выходу дифференциального усилителя, а другой - к выходу запоминающего устройства, при этом выход датчика полижения вала подсоединен ко входу .программного генератора, выходы котброго подключены к контактам генератора высокой частоты и к контактам запоминающих устройств. На чертеже приведена блок-схема предлагаемого устройства. i Устройство содержит датчики,изме ряемого параметра 1, коммутатор 2, варикапы 3 и 4, вращающийся конденса тор 5 связи подвижного 1 и неподвиж нОго 2, блоков,сопротивления 6 под шипников, подвижной 7 обмотки питания варикапно-индуктивного моста и индуктивно связанной с ней неподвижной обмотки 8, включенной через контакты 9 на выход генератора высокой частоты 10, датчики 11 углового положения вала, запускающего программный генератор 12, генератор калибровки 13, подключенный через контактЦ 14, а далее через вращающийся кс5нденсатор 5 параллельно управляемо диагонали варикапно-индуктивного моста и усилительному блоку 15; синхронный демодулятор 16 выделения полезного сигнала и суммы полезного и калиброванного сигнала, контакты 17 и 18 подключения выхода синхронного демодулятора 16 к запоминающим устройствам 19 и 20 и далее к усилителям 21 и 22, дифференциальный усил тель 23, измеритель отношений полезного и калибровочного сигналов 24 и вторичный прибор 25, Устройство работает следующим образом. При определенном положении вала {подвижного блока устройства) датчи 11 вырабатывает синхроимпульс, кото запускает программный генератор 12, выдающий импульс для замыкания контактов 9 и 17. Через контакты 9 и и дуктивно связанные обмотки 7 и 8 подается напряжение высокой частоты от генератора 10. Таким образом варикапно-индуктивный мост получает напряжение накачки. Будучи в равновесии, мост приходит в дисбаланс по действием сигнала, получаемого чере коммутатор 2. Напряжение высокой частоты разбаланса моста (сигнал, пропорциональный напряжению датчика как аналога параметра вращающейся детали) через вращающиеся конденсаторы подается на усилительный блок 15, с выхода которого сигнал подает на синхронный демодулятор 16, а с выхода демодулятора через замкнутые контакты на аналоговое запоминающее устройство 20, которое запоминает полезный сигнал, соответствующий параметру вращающейся детали, а про раммный генератор 10 дает команду на размькание контактов 9 и 17. При следующем повороте вращающегося блока датчик вырабатывает синхроимпульс, а программный генератор вырабатывает управляющий импульс, который управляет контактами 9,14 и 18. При этом на управляемую диагональ арикапно-индуктивного моста подаетя калибровочный сигнал от генератора 13. Таким образом на выходе варикапноиндуктивного места появляется напряжение, пропорциональное сумме полезного и калиброванного сигналов, которое после усиления и детектирования через контакты 18 подается на запоминающее устройство 19. Каждый из сигналов, соответствующий полезному сигналу и сумме полезного и калибровочного сигналов через усилители 22 и 21 соответственно подаются на дифференциальный усилитель 23, который выделяет полезный сигнал, подаваемый на один из входов измерителя отношений 24. На второй вхоц этого измерителя отношений подается сигнал от запоминающего устройства 19. Выходной сигнал измерителя отношения подается на вторичный прибор контроля и регистрации температуры 25, Этот сигнал свободен от погрешностей, вызываемых сдвигом нуля всей измерительной линии и непостоянством коэффициента передачи между пластинами вращающихся конденсаторов и вращающейся и неподвижней катушки цепи питания варикапноиндуктивного моста. Предлагаемое устройство способно скомпенсировать погрешности, обусловленные сдвигом нуля - началом отсчета параметра и изменения коэффициента передачи измерительной линии, обусловленные изменением передаточных функций во всех возможных участках преобразования сигнала и в результате точность измерения увеличивается. Формула изобретения Устройство для измерения параметров вращающихся элементов машин по авт.св. № 591780, отличающеес я тем, что, с целью повышения точности, измерений, в него введены датчик положения вала, программный генератор, а между синхронным демодулятором и регистратором через контакты включены запоминающие устройства, соединенные последовательно с усилителями, подключенными ко входам дифференциального усилителя и измеритель отношения сигналов, один вход которого подключен к выходу дифференциального усилителя, а второй - к выходу запоминающего устройства, при этом выход датчика положения вала подсоединен ко входу программного генератора, выходы которого подключены к контактам высокой частоты и к контактам запомингиощих устройств.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 591780, кл. G 01 R 13/08, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактного измерения параметров вращающихся деталей машин | 1976 |
|
SU601580A2 |
| Многоканальный измерительный преобразователь на несущей частоте с встроенным цифровым синхронным детектором | 2016 |
|
RU2618727C1 |
| Устройство для измерения ускорений | 1990 |
|
SU1748073A1 |
| Устройство для измерения ускорений | 1979 |
|
SU917091A1 |
| Устройство для измерения параметров вращающихся элементов машин | 1981 |
|
SU983447A2 |
| Измеритель скорости кровотока | 1982 |
|
SU1088703A1 |
| Устройство для бесконтактного измеренияпАРАМЕТРОВ ВРАщАющиХСя дЕТАлЕйМАшиН | 1979 |
|
SU800707A2 |
| Устройство для измерения ускорений | 1983 |
|
SU1153297A1 |
| Устройство для измерения параметров вращающихся элементов машин | 1976 |
|
SU591780A1 |
| Цифровой тензометрический преобразователь на несущей частоте | 2018 |
|
RU2696930C1 |
