(54) МАНИПУЛЯТОР ДОЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОИЛЬНЫЙ АППАРАТ ВИННИКОВА И.К. | 1995 |
|
RU2084136C1 |
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
| Манипулятор для доения | 1990 |
|
SU1709966A2 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| Манипулятор доильной установки | 2024 |
|
RU2830908C1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2801542C1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2812332C1 |
| Устройство для управления процессом доения | 1983 |
|
SU1158118A2 |
| ДВУХРЕЖИМНЫЙ ДОИЛЬНЫЙ АППАРАТ | 2004 |
|
RU2269889C1 |
| Устройство для автоматизированного управления процессом доения по четвертям вымени коровы | 2020 |
|
RU2738473C1 |
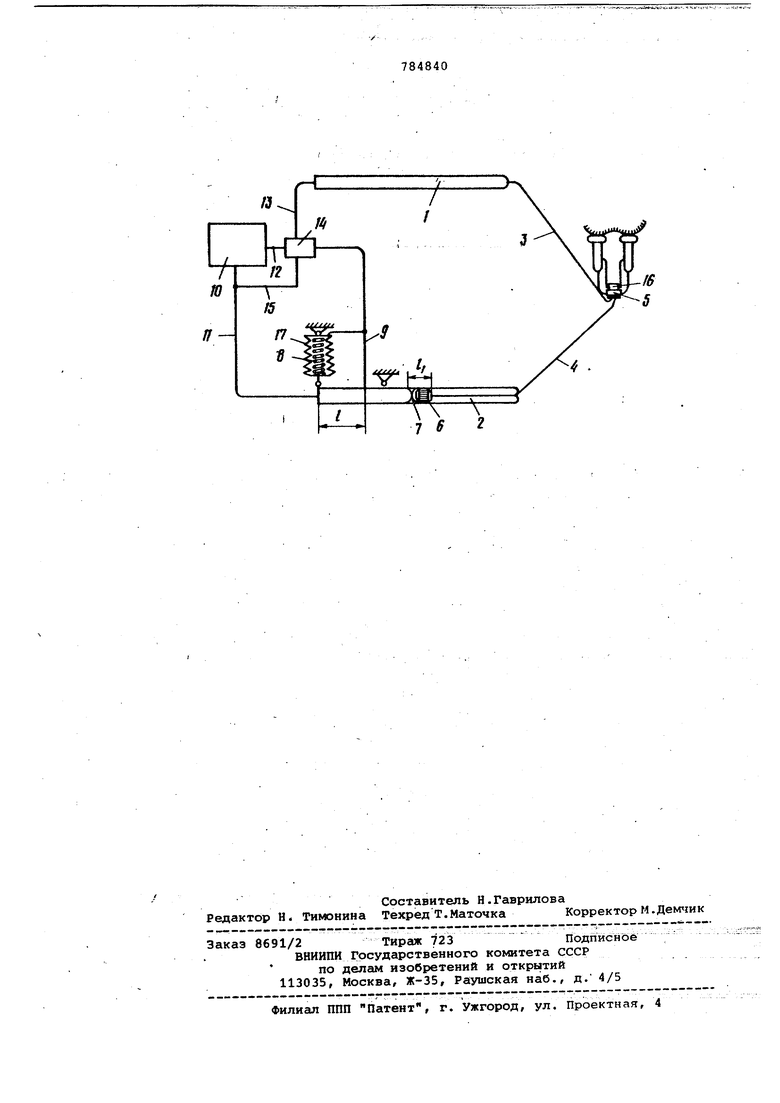
Изобретение относится к машинному доению животных. Известен манипулятор к доильным стаканам, включающий устройство для оттягивания подвесной части доильного аппарата, устройство ее поддержания и снятия 1 . Известный манипулятор сложен по конструкции и неудобен в эксплуатации. Известен манипулятор доения с гиб кой связью с доильным аппаратом, содержащий пневмоцилиндры додоя и съем доильного аппарата, блок управления и датчик интенсивности доения 2. Однако этот манипулятор сложен в эксплуатации, его конструкция не исключает падения доильного аппарата на пол при возможном спадании стаканов с сосков вымени. Целью изобретения является устранение указанных недостатков и повыше ние надежности манипулятора доения. Цель достигается тем, что манипулятор снабжен пневмоэлемейтом, соеди венным с блоком управления и пневмоцилиндрами додоя и снятия Доильного аппарата, причем пневмоцилиндр додоя шарнирно закреплен на станке и снабжен дополнительным приводом, выполненным в в-иде подпружиненного сильфона, закрепленного на дне пневмоцилиндра додоя и соединенного внутренней полостью с подпоршневой полостью пневмоцилиндра додоя в точке, отстоящей от его дна на расстояние, большее, чем длина поршня. На чертеже изображена схема манипулятора доения в период машинного додаивания животного. Манипулятор доения имеет пневмоцилиндры 1 и 2 снятия доильного аппарата и додоя, соединенные гибкими нитями 3 и 4 с доильным апп.аратом 5. В каждом пневмоцилиндре имеется направляющий поршень б и уплотнительная манжета 7. Пневмоцилиндр 2 додоя шарнирно закреплен на ограждении доильного станка и одним концйм связан с сильфоном 8, внутренняя полость которого шлангом 9 соединена с подпоршневой полостью пневмоцилиндра 2 додоя. Место присоединения шланга 9 к пневмоцилиндру додоя выбирается так, чтобы при упоре манжеты 7 в дно пневмоцилиндра в шланг 9 проникал воздух атмосферного давления через отверстие выхода гибкой нити, т.е. должно вьодёрживаться условие е 2 .
Пневмоцилиндры соединены с блоком управления 10 шлангами 11, 12 и 13. Шланг 9 питания сильфона дополнительно соединен с пневмоэлементом 14 для подъема доильного аппарата при случайном срыве его с сосков во время механического додаивания. Элемент 14 может быть реализован, например, на базе пневмоэлемента систекш ЦИКЛ П1196. Прямая подача сигнала от блока управления 10 к пневмоцилиндру 1 снятия доильного аппарата осуществляется посредством шланга 12, а аварийная (при срыве аппарата) - шлангом 15. Блок управлеййЯ соединен с датчи ком 16 Интенсивности доения. Сильфон снабжен пружиной 17.
Манипулятор доения работает следующим образом.
Потйнув заКбялек брдъйльнег-о ШгШра: S; нИЧШгой да&нй ,nog)mни пневмоцилиндров 1 и 2 ставят так, чтобы можно было надеть доильные стаканы на соски вымени. При обильной отдаче молока в пневмбцилиндры 1 и с гГомощью блока упра вленйя 10 пода ется атмосферное давление, при этом гибкие нити 3 и 4 расслаблены., а пневмоцилиндр 2 пружиной 17 сильфона 8 выведен из-под коровы. При снижении скорости доения до 10-13 г/с бЛбк управления подает в пневмоцилиндр 2 постоянный или переменный вакуум. Поршень 6 цневмоцилиндра 2 , натягивает нить 4, оттягивая доильный аппарат 5, а сильфон 8 под действием вакуума, распространяющегося в полость сильфона по шлангу 9, подводит конец пневмоцилиндра 2 под брюхо коровы так, чтобы нить 4 имела направление, обеспечивающее оттягивание дЬйльйого аппарата вниз и несколько ёпёред к голове животного. В этот момент от блока управления к пневмоэлементу 14 по .шлангу 12 по-прежнему поступает атмосферное давление, а по шлангам 9 и 15 - вакуум. Пневмоёлемёнт 14 выдает на пневмоцилиндр 1 по шлангу 13 атмосферное давление. Случайный доилtttoroannapaTai при машинном додаивании приводит к быстрому втягиванию йоршня 6 в пневмоцилиндр 2 и как только он. проходйт место установки шланга 9 в пневмоцилиндре 2, к пневмоэлементу 14 подается не вакуум, а атмосферное давление. Это приводит к переключению пневмоэлемента 14 в положение, обесп чивающее подачу в пневмоцилиндр 1 вакуума из обводной линии - шланга 15. Аппарат 5 поднимается и удерживается нитью 3 в верхнем положении, а пневмоцилиндр 2 додоя выводится пружиной 17 сильфона 8 из-под брюха коровы.
При нормальном протекании процесса машинного додаивания скорость доения постепенно уменьшается, и при скорости доения 3,3 г/с блок управт ления 10 обеспечивает подачу в пневмОцилиндр додоя 2, а следовательно и в сильфон 8 воздуха атмосферного давления, и вакуум под сосками отключается. Одновременно в пневмоцилиндр 1 съема аппарата поступает через шланги 12 и 13 вакуум от блока управления 10, благодаря чему посредством нити 3 аппарат 5 снимается с сосков, подтягивается кверху и удерживается в этом положении до начала доения
0 следующей коровы. Пневмоцилиндр 2
пружиной 17 сильфона 8 выводится при этом из-подвымени коровы, что не мешает ей покинуть доильный станок. После захода в станок следующей кос ровы операции доения ее с использованием манипулятора доения повторяются.
Формула изобретения
Q Манипулятор доения, содержащий Пневмоцилиндры додоя и снятия доильного аппарата, соединенные с доильным аппаратом гибкой нитью, блок управления и датчик интенсивности доения, отличающийся тем, что, с целью повышения надежности манипулятора, он снабжен пневмоэлементом, соединенным с блоком управления и пневмоцилиндрами додоя и снятия доильного аппарата, причем пнев, моцилиндр додоя шарнирно закреплен
на станке и снабжендополнительным приводом, выполненным в виде подпружиненного сильфона, закрепленного на Дне пнёбмоцилйндра додоя и соедйнен5 ного внутренней полостью с подпоршневой полостью пневмоцилиндра додоя в точке, отстоящей от его дна на расстояние, большее, чем длина поршня.
Источники информации, принятые во внимание при экспертизе
кл. А б1 J 5/00, 1977 (прототип).
