(54) датчик углюалх ПЕРЕМЩЕНИЙ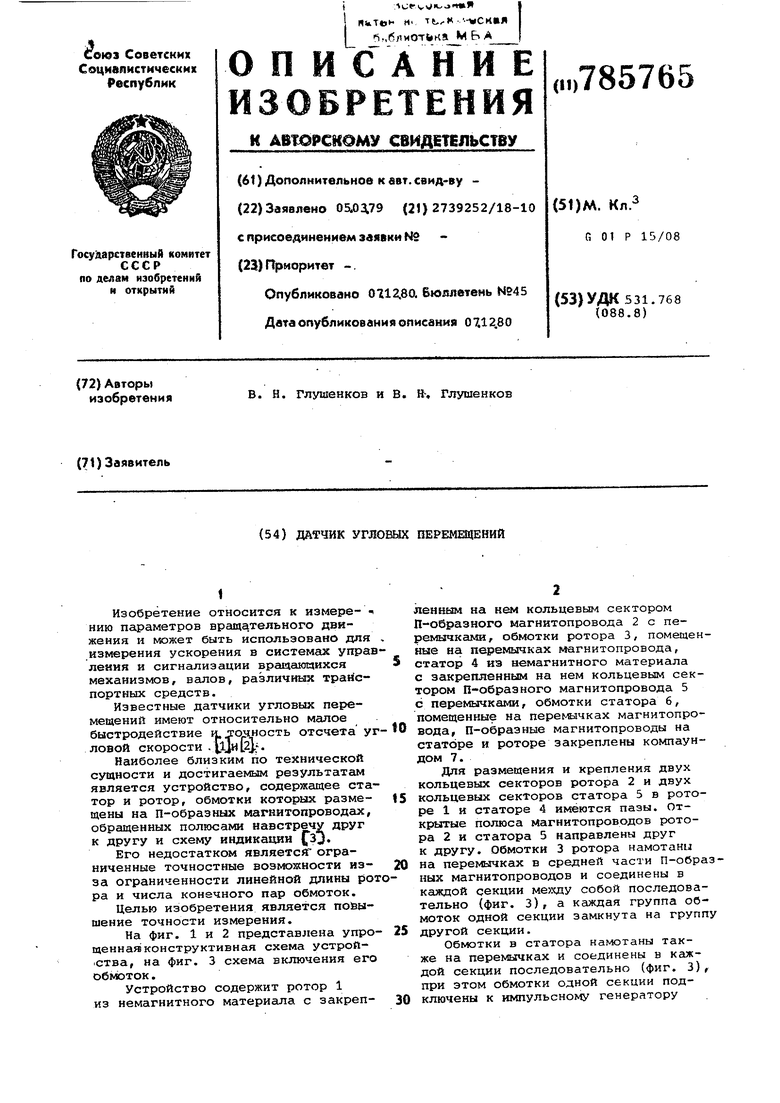
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых ускорений | 1978 |
|
SU714286A1 |
| Датчик оборотов | 1977 |
|
SU664100A1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2096898C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2118036C1 |
| Датчик угловой скорости | 1981 |
|
SU991305A1 |
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ | 1997 |
|
RU2121146C1 |
| Вентильный электродвигатель | 1972 |
|
SU445104A1 |
| Энергонезависимый датчик углового положения вала | 2023 |
|
RU2807016C1 |
| Датчик для синхронного электродвигателя с частотно-токовым управлением | 1976 |
|
SU686124A1 |
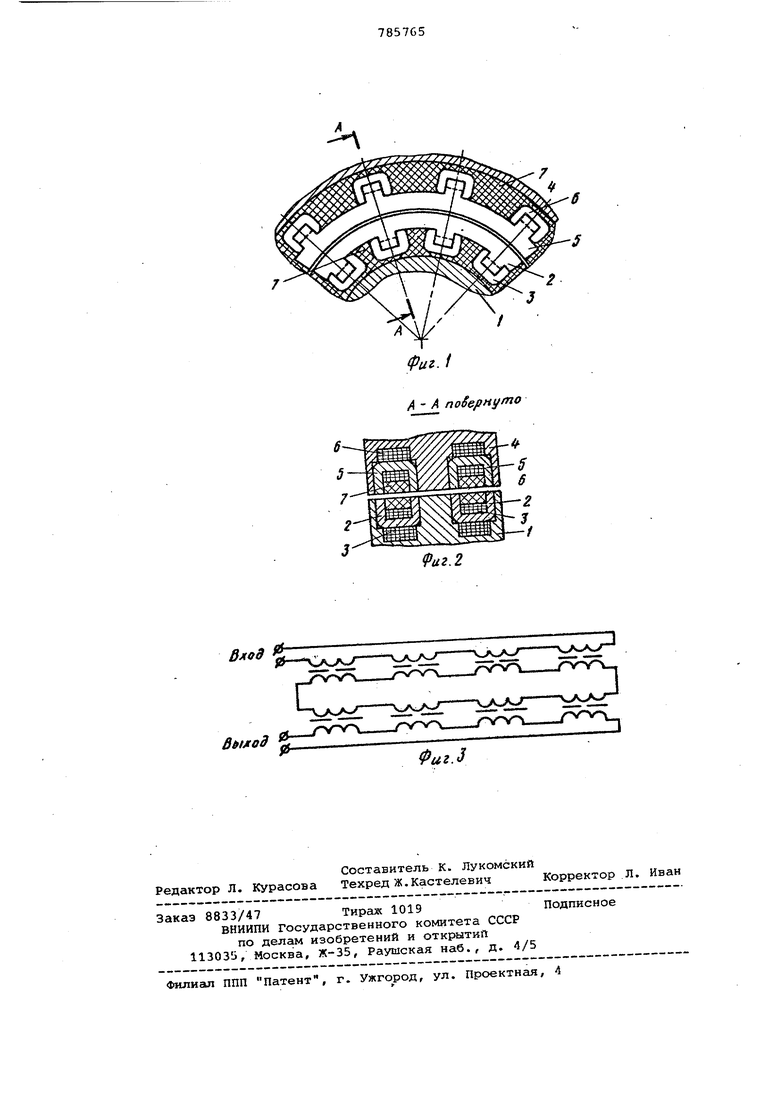
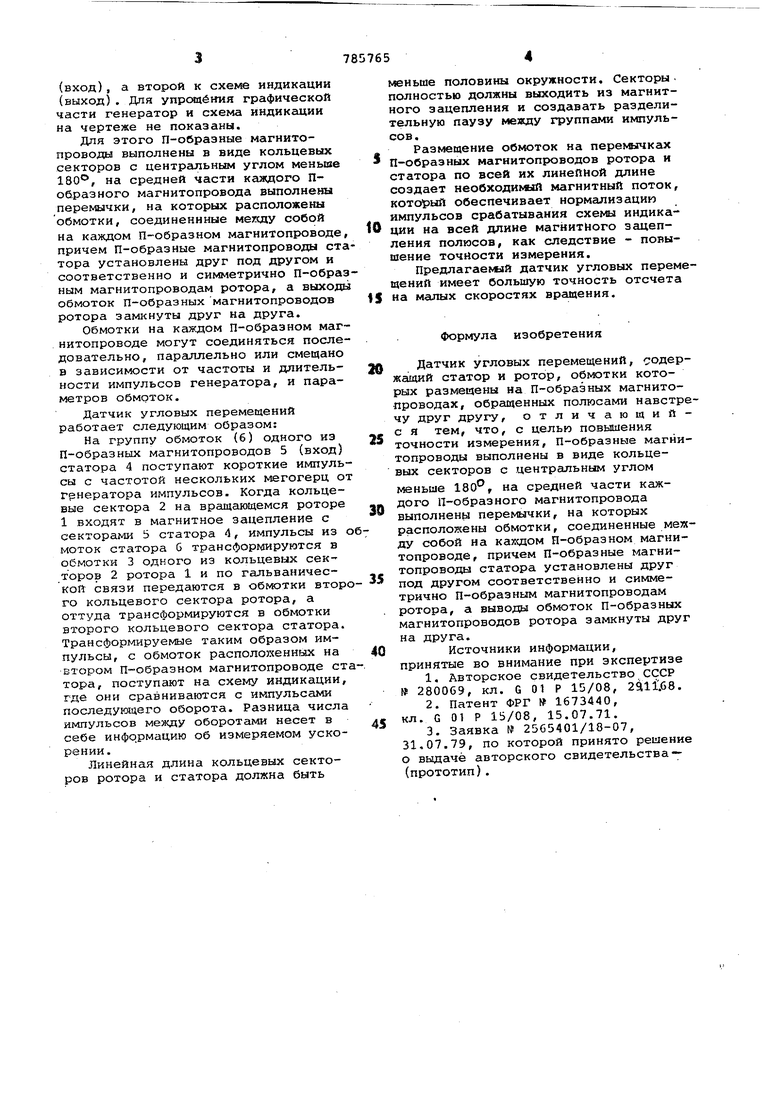
Изобретение относится к измере- ч нию параметров вращательного движения и может быть использовано для измерения ускорения в системах упра ления и сигнализации вращаквдихся механизмов, валов, различтжж транспортных средств. Известные датчики угловых перемещений имеют относительно малое быстродействие и. точность отсчета у ловой скорости -Щий;Наиболее близким по технической сущности и достигаемым результатам является устройство, содержащее ста тор и ротор, обмотки которых размещены на п-образных магнитопроводах, обращенных полюсами навстречу друг к другу и схему индикации f3J. Его недостатке является ограниченные точностные возможности изза ограниченности линейной длины ро ра и числа конечного пар обмоток. Целью изобретения является пойышение точности измерения. На фиг. 1 и 2 представлена упро щенная конструктивная схема устройСтва, на фиг. 3 схема включения его обмоток. Устройство содержит ротор 1 из немагнитного материала с закрепленным на нем кольцевым сектором П-образного магнитопровода 2 с перемычками, обмотки ротора 3, помещенные на пед)емычках магнитопровода, статор 4 из немагнитного материала с закрепленным на нем кольцевым сектором П-образного магнитопровода 5 с перемычками, обмотки статора 6, помещенные на перемычках магнитопровода, П-образные магнитопроводы на статоре и роторе закреплены компаундом 7. Для размещения и крепления двух кольцевых секторов ротора 2 и двух кольцевых секторов статора 5 в роторе 1 и статоре 4 имеются пазы. Открытые полюса магнитопроводов ротора 2 и статора 5 направлены друг к другу. Обмотки 3 ротора намотаны на перемычках в средней части П-образных магнитопроводов и соединены в каждой секции ме)хду собой последовательно (фиг. 3), а каждая группа обмоток одной секции замкнута на группу другой секции. Обмотки в статора намотаны также на перемычках и соединены в каждой секции последовательно (фиг. 3), при этом обмотки одной секции подключены к импульсному генератору
(вход), а второй к схеме индикации (выход) , Для упрсяцёния графической части генератор и схема индикации на чертеже не показаны.
Для этого П-образные магнитопроводы выполнены в виде кольцевых секторов с центральным углом меньше 180, на средней части каждого По&разного магнитопровода выполнеша перемычки, на которых расположены обмотки, соединеннные мекду собой на каждом П образном магнитопроводе, причем П-образные магкитопроводы статора установлены друг под другом и соответственно и симметрично П-образным магнитопроводам ротора, а выходы обмоток П-образных магнитопроводов ротора замкнуты друг на друга.
Обмотки на каждом П-образном магнитопроводе могут соединяться последовательно, параллельно или смещано в зависимости от частоты и длительности импульсов генератора, и параметров обмоток.
Датчик угловых перемещений работает следующим образом:
На группу обмоток (6) одного из П-образных магнитопроводов 5 (вход) статора 4 поступают короткие импульсы с частотой нескольких мегогерц от Генератора импульсов. Когда кольцевые сектора 2 на вращедащемся роторе 1 входят в магнитное зацепление с секторами 5 статора 4, импульсы из омоток статора G трансформируются в обмотки 3 одного из кольцевых секторов 2 ротора 1 и по гальванической связи передаются в обмотки второго кольцевого сектора ротора, а оттуда трансформируются в обмотки второго кольцевого сектора статора. Трансформируемые таким образом импульсы, с обмоток располозхенных на втором П-образном магнитопроводе ста тора, поступают на схему индикации, гле они сравниваются с импульсами последующего оборота. Разница числа импульсов между оборотг1ми несет в себе информацию об измеряемом ускорении.
Линейная длина кольцевых секторов ротора и статора должна быть
меньше половины окружности. Секторы, полностью должны выходить из магнитного зацепления и создавать разделительную паузу между группами импульсов.
Размещение обмоток на перемычках П-образных магнитопроводов ротора и статора по всей их линепной длине создает необходимей магнитный поток, который обеспечивает нормализацию импульсов срабатывания схемы индика-ции на всей длине магнитного зацепления полюсов, как следствие - повышение точности измерения.
Пpeдлaгae uй датчик угловых перемщений имеет большую точность отсчета на малых скоростях вращения.
Формула изобретения
Датчик угловых перемещений, содержащий статор и ротор, o6NK)TKH которых размещены на П-образных магнитопроводах, обргиценных полюсами навстречу друг другу, отличающийс я тем, что, с цельи повышения точности измерения, П-образные магнитопроводы выполнены в виде кольцеBfcox секторов с центральным углом
меньше 180, на средней части каждого П-образного магнитопровода выполнены перемычки, на которых расположены обмотки, соединенные между собой на кахсдом П-образном магнитопроводе, причем П-образные магнитопроводы статора установлены друг под другом соответственно и симметрично П-образным магнитопроводам ротора, а выводы обмоток П-образных магнитопроводов ротора замкнуты друг на друга.
Источники информации, принятые во внимание при экспертизе
Влод fc6 tjeo9
Фиг.З
