1
Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений в металлургии, приборостроении, машиностроении и строительстве.
Известны устройства для измерения линейных перемещений, например, зазора между валками прокатной клети, изменяющегося в процессе прокатки, содержащие преобразователь перемещения, установленный иепосредственно на подвижных элементах смстемы гидроуравновешивания рабочих валков,например, на штоке поршня гидродомкра- та или в плунжере. При изменении расстояния между подушками валков происходит соответствующее ему перемещение поршня гидродомкрата, которое преобразуется связанным с иим преоб-. разователем в электрический сигнал
W..
Недостатком известного устройства является большая погрешность измерения, связанная с утечками и потерями на трение, возникающими между .. гидроцилиндром и поршнем гхдродомкрата, и низкая эксплуатационная надежность, связанная с необходимостью расположения чувствительности элемента преобразователя в непосредственной близости от подушек и вгшков прокатной клети.
Наиболее близким к предлагаемому по технической сущности и достигаемо5 -му эффекту является гидравлическое устройство для измерения линейных перемещений, содержащее сообщенные: между собой, выполненные, например по идентичньт гидравлическим схемам
Iv преобраэсшатель перемещений и узел установки нуля, каждый в виде соосных корпуса н подпружиненного относительно корпуса и соединенного с ним через сильфон поршня .с измерительным
tS наконечником в преобразователе и винctM настройки в узле установки нуля и пшроэлектрический датчик йеремещения 2.
Недостаток известного устройства20 низкая точность измерения, обусловлевная упругими деформациями сильфонов.
Цель изобретения - повышение точности измерения.
25 Указанная цель достигается тем, что преобразователь перемещений и узел установки нуля снабжены каяадый двумя дополнительными соосными основному сильфонами одинакового диаметра,
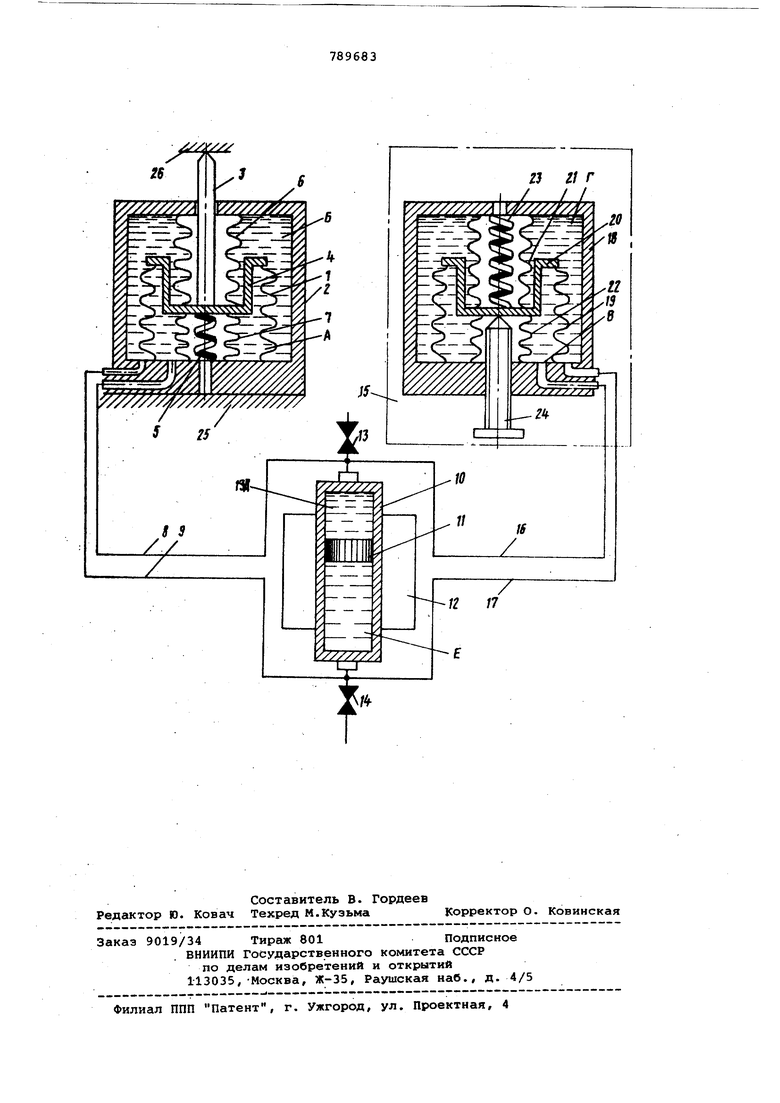
30 Меньшего, чем у основного сильфона. соединяющими поршень с противоположными стенками корпуса и образующими ве внутренние, сообщенные с атмосферой полости, в которых размещены пружины, наконечник и винт, и две внешние, заполненные жидкостью полос ти, а гидроэлектрический датчик выполнен в виде полого цилиндра со сво бодно перемещающимся поршнем, деля;щим полость цилиндра на две части, каждая из которых сообщена с идентичными внешними полостями преобразо вателя перемещений и узла;установки нуля, и электрического преобразователя перемещения поршня цилиндра. На чертеже схематически изображено гидравлическое устройство для измерения линейных перемещений. Гидравлическое устройство для измерений линейных перемещений содер-. жит основной сильфон 1, расположенный внутри корпуса 2, механическое звено, включающее измерительный наконечник 3, упирающийся в фигурный поршень 4 основного сильфона 1, распорную пружину 5, дополнительные сильфоны б и 7, трубопроводы 8 и 9, соединяющие две рабочие полости корпуса 2 с полостями цилиндра 10,внутри которого расположен свободно пере мещающийся поршень 11, преобразователь 12 перемещения в электрический сигнал, вентили 13 и 14, гидравличес кий узел 15 установки нуля, соеди-ненный трубопроводами 16 и 17 с полостями цилиндра 10. В состав гидрав лического узла установки нуля входят корпус 18, внутри которого установлены сильфон 19 с фигурным поршнем 20, дополнительные сильфоны 21 и 22, распорная пружина 23 и микрометричес кий винт 24. Корпус 2 и наконечник 3 опираются на противолежащие поверх ности элементов конструкции 25 и 26, взаимные перемещения которых требуется измерять. Внутри корпуса 2 с помощью сильфо нов 1, 6 и 7 образованы четыре отделенные друг от друга полости: полости А и б , представляющие собой дифференциальный объемный элемент, и две полости, заключенные внутри силь фонов 6 и 7, сообщающиеся с атмосферой через отверстия в корпусе 2. Внутри корпуса 18 с помощью компенсационного сильфонов 19, 21 и 22 также образованы четыре отделенные друг от друга полости: полости Ь и Г представляющие собой дифференциальный объемный элемент,и две полости, заключенные внутри сильфонов 21 и 22, сообщающиеся с атмосферой через отверстия в корпусе 18. Объем, заключенный внутри цилиндра 10, с помощью поршня 11 также разделен на две полости Д и Е , cooQ щающиеся трубопроводами 8 и 9 с полостями Д и Б/ соответственно, а рубопроводами 16 и 17 - с полостями и Г, соответственно. Замкнутые объемы, образованные ообщающимися полостями А ,Ъ и Д с рубопроводами 8 и 16, сообщающимися олостями Б , Г и Е с трубопроводами и 17, заполнены рабочим телом,наример, спйртоглицериновой смесью. оршень 11 всегда устанавливается в аком положении, при котором давлеие рабочего тела во всех обозначеных полостях практически одинаково. ентили 13 и 14 служат для заполнейия полостей А , Б ,S , Г , Д и Е рабочим телом, а распорные пружины 5 и 23 необходимы для обеспечения требуемого усилия прижима фигурных поршней 4 и 20 к элементам, передающим перемещение наконечнику 3 и микрометрическому винту 24. Устройство работает следующим образом. Когда расстояние между поверхностями 25 и 26 соответствует начальному положению, поршень 11 находится в нулевом положении, например, расположен в центре цилиндра, а преобразователь перемещения в электрический сигнал 12 вырабатывает сигнал, соответствующий зтому положению поршня (например, нулевой). При этом давление рабочего тела в полостях А,б,Е,Г,Д иЕ одинаково. При изменении расстояния между поверхностями 25 и 26, например, . уменьшении расстояния относительно исходного, наконечник 3 давит на поршень 4, сжимая основной сильфон 1. Сжатие сильфона 1 приводит к уменьшению объема полости А и такому же увеличению объема полости Б, что вызывает увеличение давления рабочего тела в полостях А,Б и Д и уменьшение давления рабочего тела в. полостях Б ,Г и Е . Под действием разности давлений поршень 11 переместится внутри цилиндра 10 вниз и займет, новое положение, при котором восстановятся прежние .суммарные объемы полостей А,Ь,Д, и Б,Г,Е а давление во всех обозначенных полостях примет первоначальное значение. В случае увеличения расстояния между поверхностями 25, 26 наконечник 3 под действием пружины 5 переместится вверх сильфон 1 растянется, что приведет к увеличению объема полости Л и такому же уменьшенрно объема полости В . Давление рабочего тела в полостях А,В ,Д уменьшится, а в полостях Б, Г,Е - увеличится. Под действием возникшей разности давлений поршень 11 переместится внутри цилиндра 10 и займет положение, при котором вновь восстановятся прежние суммарные объемы полостей А,Ъ ,Д иБ,Г,Е , а давление во всех полостях займет первоначальное значение.
Величина перемещения поршня 11 определяется соотношением
d -d uM. .. )
Ъ где л h - изменение расстояния между
поверхностями 25 и 26; d - действующий диаметр сильфона 1; 6 - действующий диаметр вспомогательных сильфонов б и 7 ; Л Н - величина перемещения 11;
d - диаметр поршня 11. Здесь и далее погрешностью,вносимой за счет конечной массы поршня, пренебрегаем.
Преобразователь 12 преобразует перемещение поршня 11 в соответствующей электрический сигнал.
Отсутствие разности давлений в полостях цилиндра в состоянии покоя, обусловленное малой величиной трения поршня 11 о стенки цилиндра 10,смоченные рабочим телом жидкocть), практически исключает переток жидкости между полостями цилиндра 10 в статическом состоянии, а незначительный переток, возникающий во время перемещения, пропорционален величине пробега поршня 11 и не может накапливаться более величины, соответствующей одному полному ходу йоршня 11 в цилиндре 10. Для снижения величины перетока рабочего тела цилиндр 10 и поршень 11 выполняются с высокой точностью обработки соприкасающихся поверхностей.
Изменение положения поршня 11, например при необходимости перейти на новую точку отсчета, осуществляется путем вращения микрометрического винта 24.- .
В связи с возможностью получить значительное усиление перемещения поршня 11 по сравнению с измеряемым перемещением к преобразователю nepej мещения в электрический сигнал;, предъявляются невысокие требования в части разрешающей способности и он может быть выполнен,например, по принципу электромагнитного снитыва-:. ния.
Устройство позволяет создать средства для измерения перемещений механизмов , эксплуатирующихся в тяжелых условиях (большие перепады температур, загрязненность, наличие воды и lapa).
Формула изобретения
Гидравлическое устройство для измерения линейных перемещений, содер жащее сообщенные между собой, выполненные, например, по идентичным гидравлическим схемам, преобразователь, перемещений и узел установки нуля,
каждый в виде соосных корпуса и подпружиненного относительно корпуса и соединенного с ним через сильфон поршня с измерительным наконечником в преобразователе и винтом настройки в узле установки нуля и гидроэлектрический датчик перемещения, о тличающееся тем, что, с целью повышения точности, измерения, преобразователь перемещений и узел установки нуля снабжены каждый двумя дополнительными соосными основному сильфонами одинакового диаметра, меньшего, чем у основного сильфона, соединяющими поршень с противоположными стенками корпуса и образую-щйми две внутренние, сообщенные с атмосферой полости, в которых размещены пружины, наконечник и винт, и две внешние, заполненные жидкостью полости, а гидроэлектрический датчик
выполнен в виде полого цилиндра со свободно перемещающимся поршнем,делящим полость цилиндра на две части, каждая из которых сообщена с идентичными в аешними полостями преобразователя перемещений и узла установки нуля, и электрического преобразователя перемещения пориня цилиндра.
Источники 1 нформации, принятые во внимание при экспертизе 1. Патент Австралии 442545, кл. В 21. е 1973.
2. Авторское свидетельство СССР № 435451, кл. G 01 В 13/16, 1975 (, прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения сигнала нагрузки от механически подрессоренной ведущей оси дополнительного осевого агрегата | 1990 |
|
SU1792379A3 |
| Глубинный термометр | 1979 |
|
SU885822A1 |
| Вертикальный градиентометр | 1988 |
|
SU1836644A3 |
| РУЛЕВАЯ МАШИНА | 1990 |
|
RU2034747C1 |
| Датчик порового давления | 1991 |
|
SU1792469A3 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| Устройство для измерения зенитного угла скважины | 1980 |
|
SU926261A1 |
| Гидропневматическая рессора подвески транспортного средства | 1972 |
|
SU564790A3 |
| Гидравлический прибор для измерения линейных размеров | 1978 |
|
SU746181A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕСТАНОВКИ РАСПЫЛИТЕЛЬНЫХ ФОРСУНОК | 2011 |
|
RU2574569C2 |