(54) ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический привод | 1983 |
|
SU1081660A1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| Устройство для управления вибродвигателем | 1978 |
|
SU764016A1 |
| ДОПЛЕРОВСКИЙ УЛЬТРАЗВУКОВОЙ ЛОКАТОР | 1991 |
|
RU2065289C1 |
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ | 1969 |
|
SU251060A1 |
| Устройство для питания пьезокерамического преобразователя вибродвигателя | 1978 |
|
SU739671A1 |
| Пьезоэлектрический генератор конденсаторной системы зажигания | 1980 |
|
SU907290A1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА С АСИНХРОННЫМ СТАРТЕРОМ-ГЕНЕРАТОРОМ | 1997 |
|
RU2173020C2 |
| СХЕМА АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ | 2018 |
|
RU2684510C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 1991 |
|
RU2025882C1 |
1
Изобретение относится к приборостроению и предназначено для использования в аппаратуре магнитной записи, в частности в качестве привода ведущего узла магнитофона.
Известен привод лентопротяжных механизмов, в котором используется преобразование электрической энергии в механическое вращательное движение ротора с помощью пьезоэлектрического элемента и содержатся блоки управления и стабилизации частоты вращения поивода. Привод имеет термочувствительный элемент, с помощью которого компенсируется неравномерность вращения ротора, связанная с изменениями температурных условий I .
Недостатком данного привода является нестабильность вращения ро- . тора, вызванная,например изменением механической нагрузки на валу.
: Известен пьезоэлектрический привод, содержащий пьезоэлектрический двигатель, источник переменного электрического напряжения. С целью повышения стабильности работы в устройство введены преобразователь изменения тока в управляющий сигнал..
умножитель глубины модуляции и сумма тор. Преобразователь изменения тока в управляющий сигнал подключен к пьезоэлектрическому двигателю и
5 к умножителю глубины модуляции, выход которого соединен с одним из входов сумматора,подключенного вы-ходом к пьезоэлектрическому двигателю, а другим входом - к источнику переменного электрического напряжения, управляющий вход которого связан с умножителем глубины модуляции и с преобразователем изменения тока в управляющий сигнал 2,
15 Однако, при длительной работе привода происходит значительное изменение средней частоты вращения двигателя. Кроме того,при изменении температуры меняется ток через пье20 зоэлемент двигателя и частота вращения. Также нестабильна мгновенная частота врсццения двигателя, связанная с эксцентриситетом ротора.
Известно устройство, содержащее
25 пьезоэлектрический двигатель и преобразователь частоты вращения вала двигателя в частоту электрического сигнала. Причем, сигнал с преобразователя частоты вращения (датчика
30 скорости)поступает на частотный диск
риминатор и через блок управления управляет напряжением питания пъезопреобразователя
Однако это устройство не обеспечивает стабильности вращения, необходимой для использования этого устройства в качестве привода ведущего узла магнитофона высшего класса.
Цель изобретения - уменьшениенестабильности мгновенной и средней частоты вращения пьезоэлектрического двигателя и упрощение устройства.
Поставленная цель достигается тем, что пьезоэлектрический привод, содержащий пьезоэлектрический двигатель и преобразователь частоты вращения вала двигателя в частоту электрического сигнала, пропорциональную частоте вращения вала, снабжен усилителем мощности, вход которого соединен с выходом преобразователя частоты вращения вала, а выход подключен к пьезоэлектрическому двигателю.
Кроме того, с целью обеспечения самозапуска, усилитель мощности охвачен положительной обратной связью, в цейь которой включено реле времени, подключенное к выходу преобразователя частоты вращения вала-двигателя в частоту электрического сигнала. ..
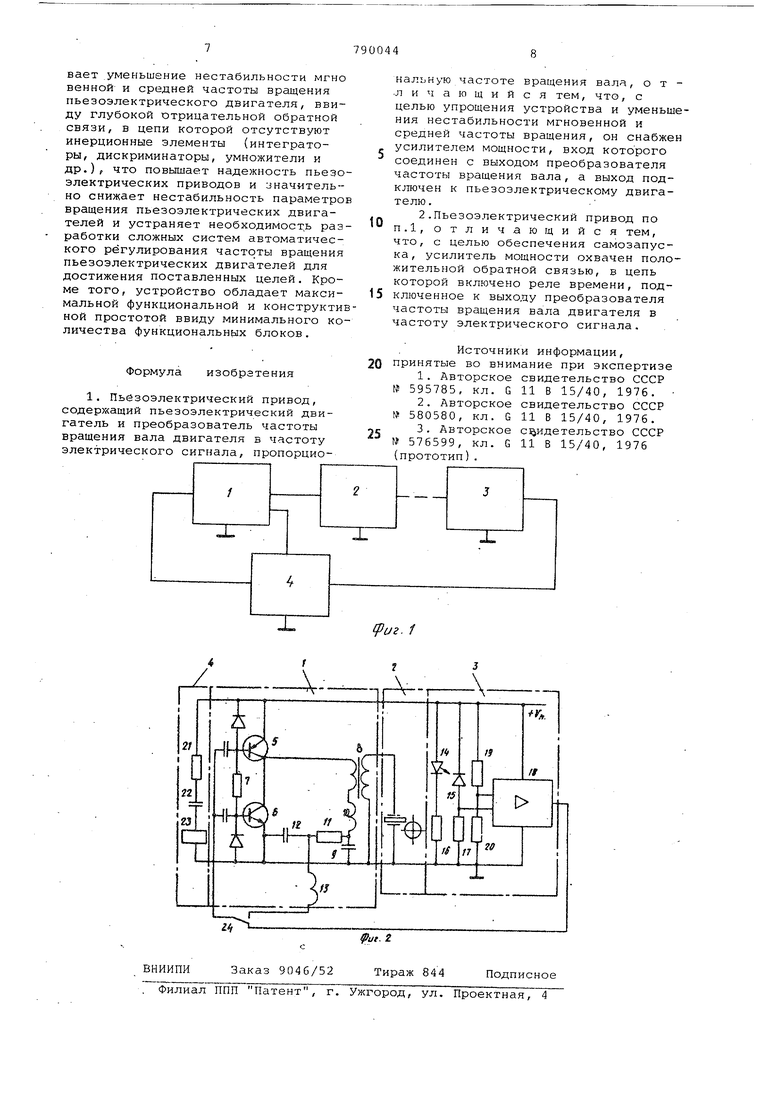
На фиг.1 представлена блок-схема устройства на фиг.2 - принципиальная схема.
Пьезоэлектрический привод содержит усилитель 1 мощности, пьезоэлектриче.скйй двигатель 2, преобразователь 3 частоты вращения вала двигателя в частоту электрического сигнала. Для самозапуска пьезоэлектрический привод снабжен реле 4 времени.
Усилитель 1 мощности аыполнен на транзисторах 5 и 6 с сопротивлением 7 смещения. К выходу усилителя мощности через электрический трансформатор 8 подключен пьезоэлектрический даигатепь 2. Для обеспечения самозапуска усилитель мощности снабжают элементами положительной обратной связи: емкостью 9, индуктивность 10, сопротивлением 11, емкостью 12 и индуктивностью 13.
Преобразователь 3 частоты вращения вала двигатели в частоту электрческого сигнала содержит растровый диск, установленный на валу двигателя {не показан), оптронную пару 1 и 15 с токоограничивающкми элементами 16 и 17 и усилитель 18 напряжения с элементами 19 и 20 смещения. Выход преобразователя 3 частоты вра щения вала двигателя подключен ко входу усилителя 1 мощности. . Для самозапуска пьезоэлектрический привод снабжен реле 4 времени, которое включает сопротивление 21,
емкость 22, реле 23 (фиг.2) и обеспечивает на время запуска пъезоэлектрического -привода эa 1ыкaниe цепи положительной обратной связи усилителя 1 мощности и отключение выхода преобразователя 3 частоты вращения вала двигателя, в частоту электрического сигнала от входа усилителя 1 мощности.
Устройство допускает применение также других преобразователей скорости вралцения в частоту импульсов, .например магнитных, с применением дополнительно умножителя частоты. Кроме того, в качестве реле времени допускается применение бесконтактных реле с транзисторныУШ или другими полупроводниковыми Kj-тчами.
Пьезоэлектрический привод работает следующим образом.
При отсутствии в приводе реле 4 времени и элементов 9-13 положительной обратной связи усилителя 1 мощности, после подключения к схеме напряжения питания от источника, вал пьезоэлектрического двигателя 2 не вращается из-за от(рутствия переменного напряжения на входе усилителя 1 мощности, а следовательно и на входе пьезоэлектрического двигателя 2. Если принудительно, например с помощью бокового узла магнитофона, раскрутить вал пьезоэлектрического двигателя 2 со скоростью выше номинальной, то растровый диск, установленный на валу пьезоэлектрического двигателя, начнет модулировать световой поток в оптронной паре 14 и 15. В результате ток фотодиода 15 модулируется с частотой, равной произведению частоты вращения вала пьезоэлектрического двигателя на количество растровых линий. Переменное напряжение снимается с резистора 17 и подается на вход усилителя 18 напряжения. Усиленное напряжение подается на вход усилителя 1 мощности, которое усиливается по мощности и подается на пьезоэлектрический двигатель.
Если прекратить принудительное вращение вала пьезоэлектрического двигателя 2, он начнет тормозиться из-за трения в подшипниках и внешней нагрузки, а частота электрического сигнала на выходе усилителя 18 начнет понижаться и приближаться к резонансной частоте пъезоэлёмента пьезоэлектрического двигателя 2.
Снижение частоты электрического сигнала с выхода усилителя 18, а следовательно и торможение вала пьезоэлектрического двигателя 2 происходит до некоторого значения частоты электрического сигнала на выходе усилителя 18 напряжения и на входе ;Пьезоэлектрического двигателя 2. Это значение частоты электрического сигнала (рабочая точка) лежит в пределах правого склона резонансной характеристики пьезоэлемента двига-, теля. Если под воздействием возмущающих факторов вал двигателя 2 вра цается с меньшей частотой, то уменьшается частота электрического сигнала на входе пьезоэлектрического двигателя, что приводит к увеличению амплитуды колебаний пьезоэлемента и увеличению частоты вращения вала до номинального значения.
Аналогично,что при увеличении частоты вращения вала, реакция привода направляется на уменьшение частоты, до номинального уровня.
Таким образом, устройство охвачено отрицательной обратной связью, и частота вращения вала остается постоянной.
При самозапуске пьезоэлектрического привода,после включения источника питания,через обмотку реле 23 (фиг.2) протекает большой зарядный ток емкости 22, достаточный для срабатывания реле 23 . При этом переключающий контакт 24 замыкает цепь положительной обратной связи усилителя 1 мощности. Усилитель 1 мощности, охваченный положительной обратной связью, представляет собой автогенератор, где частотозадающим элементом является пьезоэлектрический двигатель 2.
Переменное напряжение на электродах эммитер-коллектор транзисторов 5 и 6 усилителя 1 мощности, сдвинуг тое на 180 относительно напряжения на электродах эмиттер-база, подает-, ся на последовательный контур 9 и 10 настроенный на резонансную частоту пьезоэлектрического двигателя 2. Напряжение с емкости 9 через резисто 11, отстающее по фазе на 90относи-: тельно напряжения на электродах эмиттер-коллектор транзисторов 5 и б, подается на параллельный резонансньгй контур, настроенный на резонансную частоту пьезоэлектрического двигателя 2. Параллельный резонансный контур состоит из емкости 12 и индуктивности 13,причем последовательно с индуктивностью включен вход усилителя 1 мощности. Такое включение входа усилителя 1 мощности в параллельном контуре позволяет получить на входе усилителя 1 мощности напряжение, отстающее по фазе на 90 от-носительно напряжения на емкости 9 и на 180 относительно напряжения . на электродах эмиттер-коллектор транзисторов. Такой сдвиг фаз определяет цепь обратной связи как положительную и баланс фаз. у описываемого автогенератора выполняется,так. как сдвиг фаз между напряжением на входе усилителя при разомкнутой цепи .обратной- связи и напряжением на выходе цепи обратной связи равен нулю Условие баланса амплитуд выполняеГ.ся заСчет выбора коэффициента усилия по току применяемых транзисторов, а также путем выбора элементов ll-lCK
При замыканиицепи положительной обратной связи переключаклдим контактом 24, реле 23 производит самовозбуждение описанного автогенератора, частота генерации которого близка к резонансной частоте пьезоэлектрического двигателя 2. В результате возбуждения двигателя, частота вра0щения его ротора повышается и установившееся значение ее, определяемое напряжением питания привода, должно превышать номинальную частоту вращения так, чтобы частота электриsческого сигнала на выходе преобразователя 3 частоты вращения вала двигателя в .частоту элект ического сигнала превьаиала резонансную частоту пьезоэлектрического двигателя. При этом выход Преобразова0теля 3 частоты вращения вала в частоту электрического сигнала отключен с помощью переключакяцего контакта 24 реле 23 от входа усилителя мощности.
5
По мере заряда емкости 22 реле 4 времени, ток заряда уменьшается и при некотором его значении срабатывает реле 23 и переключающий контакт 24 занимает исходное положе6ние (фиг.2), подключая выход преобразователя 3 частоты вращения вала двигателя в частоту электрического сигнала ко входу усилителя 1 мс-щности. режим работы пьезоэлектри5ческого привода соответстаует -установившемуся, описанному вьяае. Время срабатывания реле 4 времени опреде ляется паспортньми данншли, применяемыми реле 23 и величиной элементов 21 и 22 и выбирается доста0точным для того, чтобы вал пьезоэлектрического двигателя 2 успевал разгоняться до максимальной частоты вращения, превышающей номинальную.
Испытания предлагаемого пьезо5электрического привода показали, что при изменении напряжения питания пьезоэлектрического привода в пределах 15-45 В, средняя частота вращения его изменяется не более
0 чем на ± 0,5% относительно номинального значения, соответствующего напряжению питания 30 В, что при изменении температуры окружающей среды 20С - 60°С, частота вра5щения пьезоэлектрического привода изменяется не более, чем на + 0,3% от номинального значения, что в ука Iзанных диапазонах изменения питающего напряжения и изменения температур, максимальный коээфициент
0 нестабильности частоты вращения пье- зоэлектрического привода не превышает значений + 0,01%.
Использование предлагаемого пьезоэлектрического привода обеспечи5
