Изобретение относится к пьезоэлектронике, а именно к устройствам управления пьезоэлектрическими двигателями (ПЭД), и может быть использовано в установка различного назначения, где перспективно применение пьезодвигателей, например в устройствах магнитной записи-воспроизведения звуковой, видео- и цифровой информации, микророботов и т.д.
Известны устройства, реализующие одномерные (амплитудный и частотный) способы управления скоростью ПЭД [1]. Эти устройства содержат регуляторы только амплитуды или только частоты.
Основным недостатком устройств, реализующих одномерные способы, является резкое ограничение рабочего диапазона изменения возмущающих воздействий вследствие отсутствия элементов и операций, осуществляющих отслеживание резонансной частоты двигателя.
Известно устройство управления ПЭД [2]. Это устройство включает регуляторы амплитуды и частоты напряжения возбуждения ПЭД, а также управляемый генератор напряжения, датчик тока возбуждения и фазовый детектор, формирующий сигнал фазовой ошибки. Способ, положенный в основу реализации этого устройства, осуществляет амплитудное управление скоростью вращения ПЭД с одновременным отслеживанием резонансной частоты при изменении момента нагрузки. Отслеживание производят посредством отработки фазового сигнала ошибки.
Это устройство разработано для ПЭД толкающего типа с возбуждением продольно-изгибных колебаний пьезорезонатора и вследствие различий характеристик не может быть использовано для управления пьезодвигателем с возбуждением контурных колебаний. Для последнего, например, характерна существенная зависимость угла сдвига фаз тока и напряжения на резонансной частоте от возмущающих воздействий. Это делает невозможным отслеживание резонансной частоты путем отработки сигнала, пропорционального отклонению угла сдвига фаз тока и напряжения возбуждения ПЭД от заданного значения (фазового сигнала ошибки). Другим недостатком устройства является ограниченная возможность повышения КПД и, как следствие этого, надежности управления. Это связано с использованием амплитудного способа управления скоростью вращения двигателя. Например, в случае применения наиболее экономичного ключевого усилителя мощности регулирование амплитуды напряжения возбуждения осуществляют изменением напряжения питания этого усилителя с помощью последовательного регулирующего элемента. Это приводит к резкому снижению КПД устройства из-за потерь на этом элементе.
Последнее из рассмотренных устройств является наиболее близким по технической сущности к предлагаемому решению (прототипом).
Целью изобретения является обеспечение реверса, повышение КПД и надежности управления.
Цель достигается тем, что в устройство помимо датчика частоты вращения, усилителя мощности (УМ) и элемента сравнения (ЭС) введены избирательный усилитель (ИУ) и управляемый фазовращатель (УФВ). Эти элементы позволяют реализовать операцию сдвига фазы напряжения на свободных электродах пьезорезонатора, необходимого для выполнения условий самовозбуждения на частоте, соответствующей положению рабочей точки на рабочем склоне характеристики скорость - частота независимо от величины внешних возмущений (например, нагрузочного момента). Таким образом, обеспечивается работоспособность управления при реверсе, а также в условиях сильных возмущений (практически при изменениях момента нагрузки во всем рабочем диапазоне, допускаемом характеристиками двигателя). С помощью этих элементов реализуется операция изменения частоты напряжения самовозбуждения в направлении компенсации сигнала рассогласования по скорости путем регулирования угла сдвига фазы напряжения на свободных электродах в функции от этого сигнала. Эта операция осуществляется при малых затратах мощности, что обеспечивает высокий КПД устройства и увеличивает надежность управления. При этом КПД устройства с ПЭД увеличивается на 10-15%.
Из вышеперечисленного видно, что заявляемые признаки удовлетворяют критериям "новизна" и "существенность отличий".
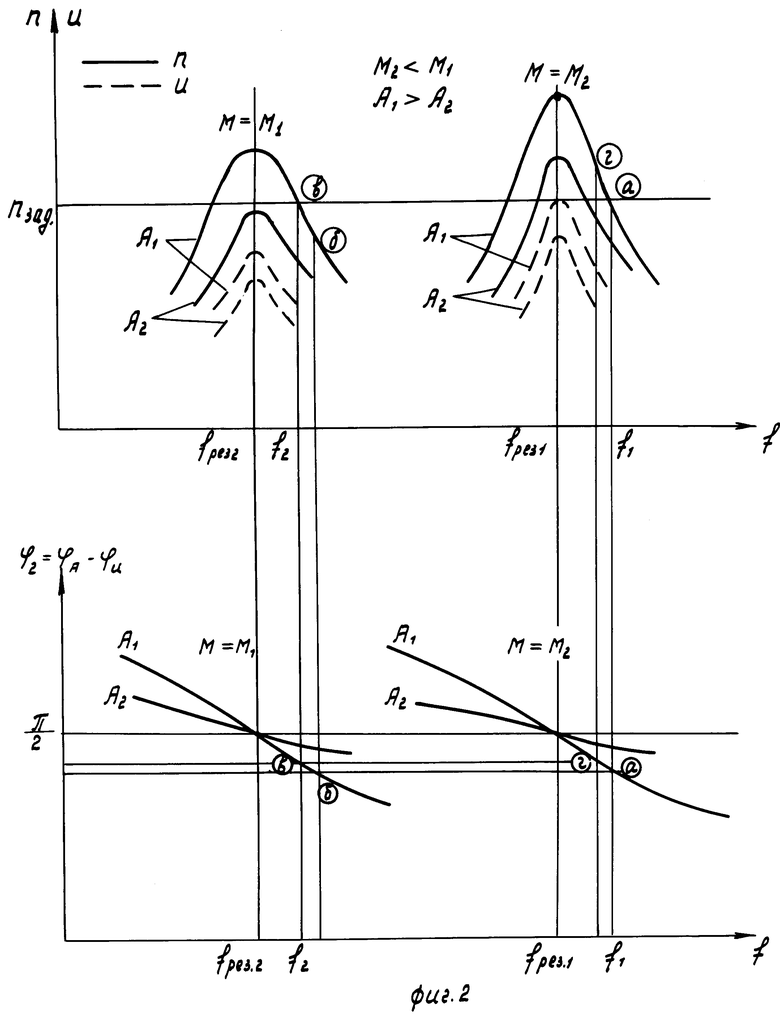
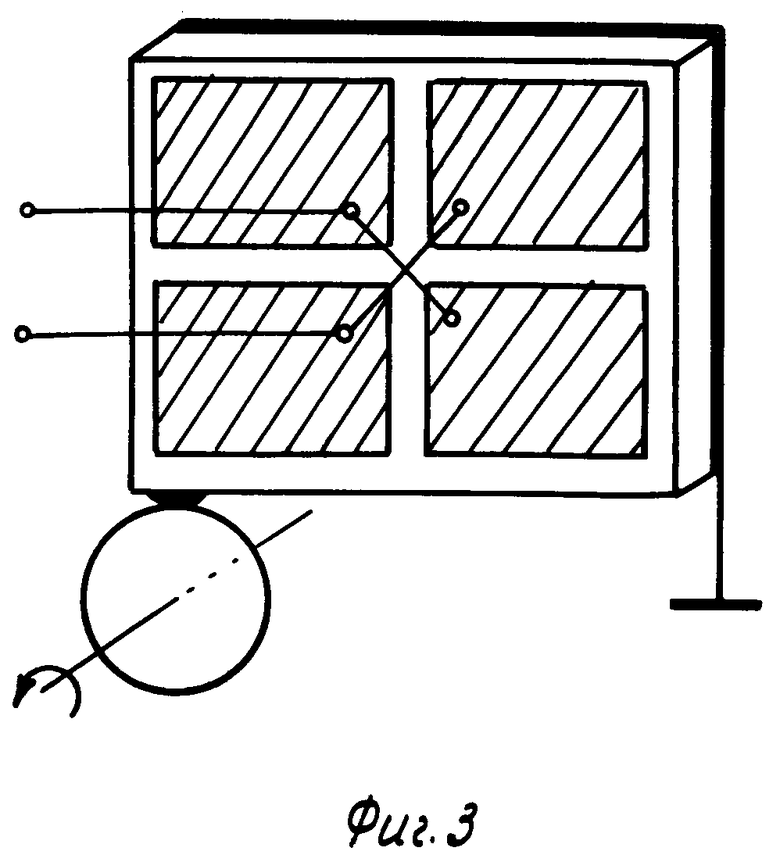
На фиг.1 представлена блок-схема устройства; на фиг.2 - характеристики ПЭД, иллюстрирующие его работу и представляющие зависимости на свободных электродах, скорости вращения двигателя, а также сдвига фаз напряжения возбуждения и на свободных электродах от частоты, снятые для фиксированных значений момента нагрузки М и амплитуды напряжения возбуждения А; на фиг.3 изображена кинематическая схема ПЭД с возбуждением контурных колебаний, где показаны расположение и коммутация электродов пьезорезистора.
При управлении предлагаемым устройством генерируют напряжение возбуждения с помощью автогенераторного процесса, используя в качестве сигнала обратной связи напряжение на свободных электродах пьезорезистора. Тем самым обеспечивают отслеживание рабочей частоты вблизи резонансного значения. Выполнение условий самовозбуждения в области рабочих частот достигается сдвигом фазового угла напряжения на свободных электродах на заданное значение. При отключении скорости вращения от заданного значения осуществляют регулирование этого угла по ПИД-закону в функции сигнала ошибки.
Устройство содержит ПЭД 1, на валу которого закреплен датчик частоты вращения - датчик обратной связи (ДОС) 2. Выходной сигнал ДОС, пропорциональный текущему значению скорости, поступает на один из входов ЭС 3, другой вход которого подключен к выходу блока задания частоты вращения (БЗЧ) 4. Выходной сигнал ЭС - сигнал ошибки по скорости ε(t) - через блок 5 регулирования частоты поступает на управляющий вход УФВ 6. Сигнал со свободных электродов пьезорезонатора ПЭД через переключатель (ПК) 7 поступает на вход ИУ 8. Выход ИУ подключен к сигнальному входу УФВ 6, а выход УФВ - к входу УМ 9. Выходной сигнал УМ через ПК 7 поступает на рабочие электроды пьезорезонатора ПЭД 1.
Блоки 1, 7, 8, 6, 9 образуют петлю положительной обратной связи, т.е. реализуют автогенератор напряжения возбуждения ПЭД, обеспечивающий отслеживание рабочей частоты в районе резонансного значения. Блоки 1, 2, 3, 5, 6, 9, 7 составляют фазо-частотный контур регулирования скорости вращения ПЭД.
В качестве ПК 7 в простейшем случае используется механическое коммутирующее устройство на два положения и на два направления. С помощью этого ПК коммутируются свободные и рабочие электроды пьезорезонатора ПЭД и тем самым осуществляется реверс двигателя.
Блок 5 регулирования частоты осуществляет формирование сигнала управления фазовым углом напряжения на свободных электродах по ПИД-закону в функции сигнала ошибки по скорости. Регулирование осуществляется по следующей функции:
Uвых = K1Uвх+ K2 + K3 ∫ Uвхdt
+ K3 ∫ Uвхdt
Коэффициенты К1, К2, К3 рассчитываются из условия обеспечения требуемого качества переходного процесса регулирования скорости. Блок регулирования частоты выполнен на базе операционных усилителей. Пропорциональные, суммирующие, интегрирующие, дифференцирующие звенья реализованы по типовым схемам.
УФВ 6 выполнен на операционном усилителе. Для осуществления регулирования фазы в его составе имеется полевой транзистор, работающий в режиме регулируемого сопротивления. Нижний и верхний пределы изменения фазового угла УФВ 6 устанавливаются из требований выполнения условий самовозбуждения автогенератора и из требования сохранения устойчивости контура регулирования по скорости соответственно. Дело в том, что при отсутствии ограничений сверху, когдаϕΣ= ϕИУ+ϕУФВ+ϕУМ>π/2, рабочая точка переходит на нерабочий - левый склон характеристики скорость - частота, что приводит к инверсии фазы и, следовательно, к потере устойчивости в контуре регулирования скорости (см. фиг.2). Здесь ϕИУ,ϕУФВ,ϕУМ - углы сдвига фаз, вносимые ИУ 8, УФВ 6, УМ 8 соответственно. С другой стороны, при отсутствии ограничения снизу, если ϕΣ= ϕИУ+ϕУФВ+ϕУМ<<π/2, рабочая точка оказывается глубоко внизу на склоне характеристики напряжение на свободных электродах - частота (фиг.2). При этом перестает выполняться одно из условий самовозбуждения автогенератора - условие баланса амплитуд.
Включение в состав устройства ИУ 8 необходимо для предотвращения самовозбуждения схемы на частотах паразитных мод колебаний пьезорезонатора. Резонансная частота ИУ выбирается совпадающей с центром области частот, внутри которой группируются резонансные частоты пьезодвигателя при заданных диапазонах изменения А и М и при реверсе двигателя. Полоса пропускания ИУ должна быть шире упомянутой выше области частот и одновременно достаточно узкой, чтобы надежно подавлять сигналы паразитных частот. Указанное условие выполняется, когда величина добротности избирательной цепи ИУ составляет 3-7.
Работает устройство следующим образом.
Амплитуда напряжения возбуждения не регулируется, ее величина определяется напряжением питания и сохраняет приблизительно постоянное значение, равное А1 (см. фиг.2). В исходном состоянии нагрузочный момент равен М2, а рабочая точка находится в положении а (фиг.2). Скорость вращения ПЭД близка к заданной, а сигнал рассогласования на выходе ЭС 3 через блок 5 регулирования частоты воздействует на управляющий вход УФВ 6 так, что условие баланса фаз ϕИУ+ϕУФВ+ϕУМ-ϕ2=0 выполняется на частоте f1, обеспечивая положение рабочей точки на правом - рабочем склоне характеристики скорость - частота (фиг.2).
Пусть имеет место скачкообразное изменение момента до значения М1 > М2. Скорость процессов установления частоты колебаний автогенератора определяется в основном инерционностью процессов в пьезорезонаторе, которая в свою очередь на 3-4 порядка меньше инерционности процессов установления скорости вращения. Поэтому практически до начала переходного процесса изменения скорости вращения устанавливается новое значение частоты автогенератора, определяемое из условия баланса фаз ϕИУ+ϕУФВ+ϕИМ-ϕ2=0, где ϕУФВ= ϕУФВ.ИСХ. Как следует из этого уравнения, ϕ2 стремится сохранить старое значение, а рабочая точка стремится в положение б, оставаясь на рабочем склоне характеристики скорость - частота. В дальнейшем в процессе отработки возникающего сигнала рассогласования по скорости происходит изменение управляющего напряжения УФВ 6. В результате изменяется (увеличивается) ϕУФВ и, как следствие, уменьшается частота автогенератора до тех пор, пока не будет скомпенсирован сигнал рассогласования по скорости. По окончании этого процесса рабочая точка оказывается в положении в, а значение частоты равно ϕ2.
Пусть в исходном состоянии рабочая точка находится в положении в (фиг. 2) и происходит сброс нагрузочного момента до значения М2 < М1. Поведение системы в этом случае аналогично описанному выше. Еще до начала переходного процесса изменения скорости происходит перестройка частоты автогенератора в условиях сохранения исходного значения ϕ2. При этом рабочая точка стремится в положение г, оставаясь на рабочем склоне характеристики скорость - частота. В дальнейшем в результате отработки возникающего сигнала рассогласования по скорости рабочая точка перемещается в положение а (фиг.2).
Пусть в исходном состоянии М = М2 и происходит пуск системы, т.е. скорость вращения n = 0. Если бы не было ограничения ϕУФВ по максимуму, то непосредственно после пуска под действием значительного по величине сигнала рассогласования по скорости могло бы оказаться ϕИУ+ϕУФВ+ϕУМ>π/2, т.е. условие баланса фаз ϕИУ+ϕУФВ+ϕУМ-ϕ2= 0оказалось бы выполненным на частотах, соответствующих левому - нерабочему склону характеристики скорость - частота. Это привело бы к потере устойчивости контура регулирования по скорости. Однако в схеме УВФ 6 введено конструктивное ограничение максимального угла ϕУФВ, так что ϕИУ+ϕУФВ+ϕУМ≅π/2. В этом случае непосредственно после пуска условие баланса фаз выполняется при ϕ2=π/2, и, следовательно, автогенератор возбуждается на частоте fрез.1 (до тех пор, пока n < nзад, ϕИУ+ϕУФВ+ϕУМ=π/2,ϕ2=π/2,f=fрез.1) После того как скорость вращения превысит заданное значение, ϕИУ+ϕУФВ+ϕУМ начинает уменьшаться под действием сигнала рассогласования по скорости, следствием чего является уменьшение ϕ2 и увеличение частоты. Это вызывает уменьшение скорости вращения. По окончании переходного процесса рабочая точка оказывается в положении а (фиг.2).
Ограничение максимального угла ϕУФВ предотвращает переход рабочей точки на нерабочий склон характеристики скорость - частота не только во время пуска, но и во всех других случаях, когда возможны колебания скорости вращения, например при появлении эффекта перерегулирования.
Введение новых элементов - УФВ 6 и ИУ 8 - позволяет реализовать отслеживание рабочей частоты в районе резонансного значения путем организации автогенераторного процесса, используя напряжение на свободных электродах в качестве сигнала обратной связи и осуществляя сдвиг фазы этого напряжения на величину, необходимую для выполнения условий самовозбуждения на заданной частоте. Это обеспечивает работоспособность предлагаемого устройства в условиях реверса и при изменениях момента нагрузки в рабочем диапазоне. Использование для этой цели элементов, описанных в устройствах-аналогах, невозможно вследствие различий характеристик объектов управления.
Организация управления скоростью вращения ПЭД путем регулирования угла сдвига фаз напряжения на свободных электродах в функции сигнала рассогласования по скорости, реализованная с помощью УФВ 6, позволяет отказаться от регулирования амплитуды напряжения возбуждения, что увеличивает КПД устройства на 10-15% по сравнению с устройством-аналогом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления пьезоэлектрическим двигателем | 1979 |
|
SU881899A1 |
| Устройство управления пьезоэлектрическим двигателем | 1978 |
|
SU765911A1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| Пьезоэлектрический частотный датчик давления | 1981 |
|
SU983474A1 |
| Пьезоэлектрический привод | 1979 |
|
SU790044A1 |
| Стабилизатор постоянного напряжения | 1979 |
|
SU800974A1 |
| Датчик давления с частотным выходом | 1980 |
|
SU883681A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| Измеритель напряженности электростатического поля | 2016 |
|
RU2643701C1 |
| Способ управления выходным напряжением пьезополупроводникового источника питания | 1985 |
|
SU1249671A1 |
Использование: в электроприводах различного назначения. Сущность изобретения заключается в том, что управление скоростью вращения пьезоэлектрического двигателя осуществляется путем регулирования угла сдвига фаз напряжения на свободных электродах в функции сигнала рассогласования по скорости с помощью управляемого фазовращателя 6, тем самым увеличивается КПД. В устройстве пьезоэлектрический двигатель 1, переключатель 7, усилитель 8, фазовращатель 6 и усилитель 9 мощности образуют петлю положительной обратной связи, т.е. реализуют автогенератор напряжения возбуждения пьезоэлектрического двигателя, обеспечивающий отслеживание рабочей частоты в районе резонансного значения. Пьезоэлектрический двигатель 1, датчик 2 обратной связи, элемент 3 сравнения, блок 5 регулирования частоты, фазовращатель 6, усилитель 9 мощности и переключатель 7 составляют фазочастотный контур регулирования частоты вращения двигателя. 3 ил.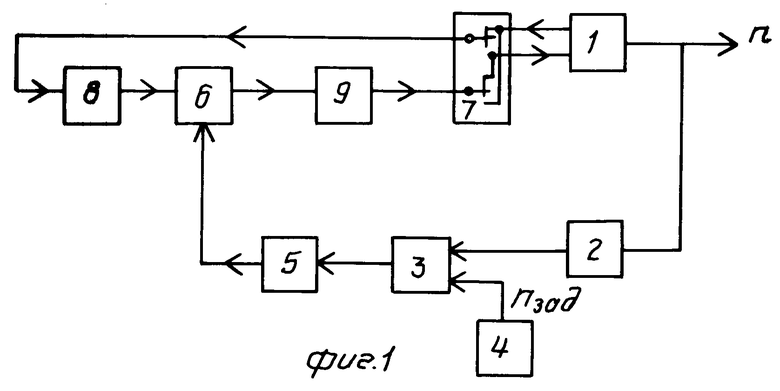
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ, содержащее датчик частоты вращения, установленный на выходном валу пьезоэлектрического двигателя и выходом подключенный к одному входу элемента сравнения, другой вход которого подключен к блоку задания частоты вращения, а выход - к входу блока регулирования частоты вращения, переключатель с четырьмя выводами, два из которых предназначены для подключения к рабочим и свободным электродам пьезорезонатора пьезоэлектрического двигателя соответственно, усилитель мощности, выход которого подключен к третьему выводу переключателя, отличающееся тем, что в него введены усилитель и управляемый фазовращатель, выход которого подключен к входу усилителя мощности, вход усилителя подключен к четвертому выводу переключателя, а выход усилителя подключен к сигнальному входу управляемого фазовращателя, управляющий вход которого соединен с выходом блока регулирования частоты вращения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления пьезоэлектрическим двигателем | 1979 |
|
SU881899A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
