t
Изобретение относится к электрогидравлическим приводам с цифровым электрическим управлением, представляющим обширный класс дискретных исполнительных механизмов, применяю- 5 щихся в различных системах автоматического управления (СДУ). Одним из направлений является создание дискретного электрогидравлического привода к цифровым САУ, состоящего 10 из шагового электродвигателя (ШЭД), дросселирующего гидрораспределителя (ДГР) гидроцилиндра и механических обратных связей, которые в совокупности составляют следящий ли- |5 нейный гидропривод с механической обратной связью.
Известна электрогидравлическая следящая система с гидромеханическим волнообразователем в прямой це- 20 пи управления, что позволяет исключить влияние энергии быстровращающихся частей двигателя и распределительного устройства 1 .
Наиболее близким техническим ре- 25 шением к данному является цифровой электрогидравлический привод, содержащий шаговый электродвигатель (ИВД), соединенный с каналом управления и гидромеханическим усилителем мощ- 30
ности, выполненным, например, в виде волнового редуктора со струйной трубой, дроссельный гидрораспределитель (ДГР) золотникового типа, связанный через передачу винт-гайка с гидромеханическим усилителем мощности и гидравлически - с линейным гидродвигателем, шток которого связан с рычагом обратной связи 12J,
В таком приводе имеется люфт в цепи механической обратной связи, который приводит к уменьшению устойчивой работы привода при инерционной нагрузке.
При компановке такого привода необходимо получить требуемое усилие на перестановку дросселирующего гидрораспределителя либо за счет увеличения передаточного отношения в кинематических связях, установленных между валом ШЭД и ДГР, либо за счет увеличения выходной мощности ШЭД. В очередь, увеличение передаточного отношения в кинематических передачах приведет к уменьшению добротности привода по скорости при фиксированной частоте приемистости для данного типа ШЭД. Увели- . чение перестановочного усилия за счет увеличения выходной мощности
ШЭД не всегда представляется возможным из-за ряда ограничений.
Цель изобретения состоит в улучшении динамических характеристик за счет значительного увеличения перестановочного усилия на ДГР-следящего линейного гидропривода с механической обратной связью и в повышении точности позиционирования.
Сущность изобретения состоит в том, что в нем рычаг обратной связи связан с винтом передачи винтгайка .
При этом вал ШЭД полностью разгружен и только отрабатывает заданный угол Оез нагрузки, который строго отрабатывается волновым редуктором с учетом коэффициента передачи. Крутящий момент, создаваемый ВОЛНОВЫМ зубчатым редуктором, реализуется за счет динамики струй жидкости, вытекаемых из сопел под давлением, равннм давлению в напорной гидролинии, и за счет редукции волнового редуктора. Позицию поворота волнового редуктора задает ШЭД которая затем трансформируется в линейное перемещение парой винтгайка .
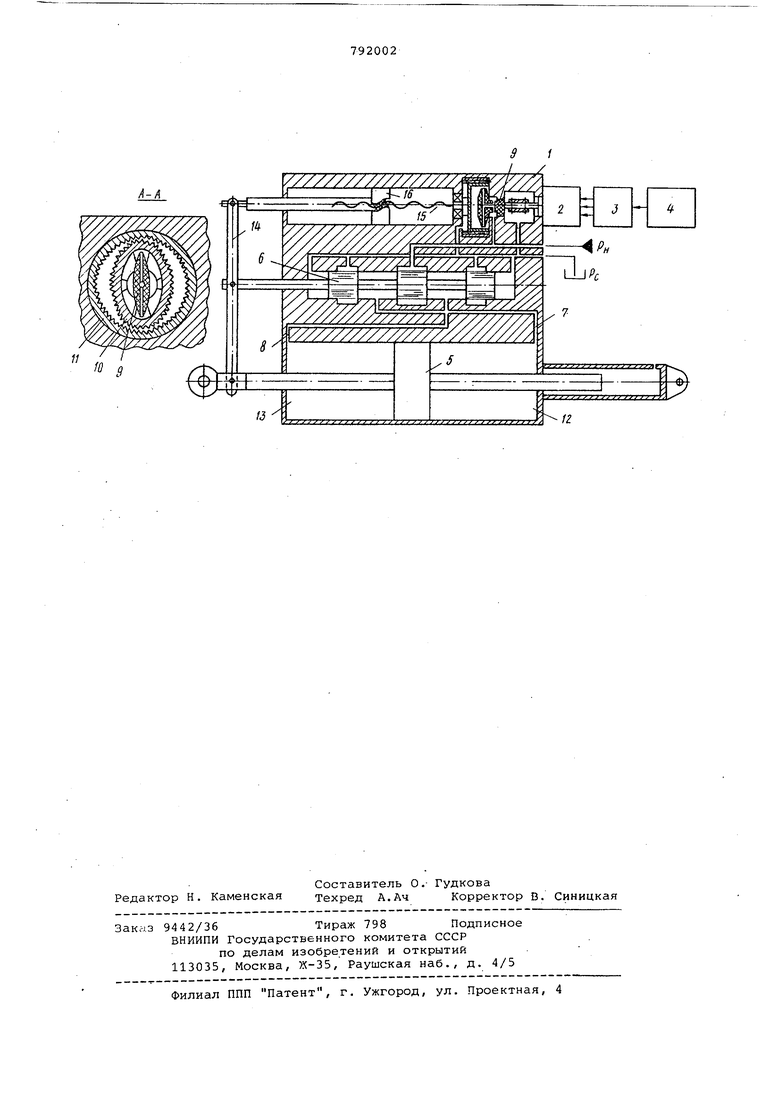
На чертеже изображена схема цифрового, электрогидравлического привода, состоящего из следующих деталей и узлов: 1 - корпус следящего линейного гидропривода; 2 шаговый электродвигатель (ШЭД); 3 - электронный коммутатор (ЭК) , формирующий сигнал в канал управления ШЭД; 4 - цифровая управляющая машина (ЦУМ) или ЭВМ, микропроцессор; 5 - поршень линейного гидродвигателя-силового гидроцилиндра со штоками, расположенными по обе сторны поршня; 6 - дроссельный гидрораспределитель, 4-х кромочный, золотникового типа (ДГР); 7 - гидролиния, соединяющая правую полость следящего Линейного гидропривода с ДГр; 8 - гидролиния, соединяющая левую полость следящего линейного гидропривода с ДГР; 9 - струйная трубка с двумя соплами (генератор волн); 10 - деформируемое ведомое зубчатое колесо волнового редуктора; 11 - неподвижное зубчатое колесо волнового редуктора; 10 и 11 - в совокупности составляют волновой зубчатый редуктор; 12 - правая полость силового гидроцилиндра; 13 - левая полость силового гидроцилиндра; 14 рычаг (механичес1 ой) обратной связи следящего линейного гидропривода; 15 - винт; 16 - поршень со штоком, содержащий гайку;(15 и 16 - в.совокупности сс-ставляют передачу винтгайка); Рн и PC - подсоединение соответственно напорной и сливной гидролинии к приводу.
Цифровой электрогидравлический привод состоит из ШЭД 2, который
через муфту жестко соединен со струной трубкой-9, имеющей два сопла, расположенные в одной плоскости под углом -180°. Струйная трубка помещена в корпусе следящего линейног гидропривода 1 в подшипниках скольжния и через внутренние каналы соединена с напорной гидролинией Рн. Струйная трубка имеет возможность вращаться в корпусе гидропривода в подшипниках скольжения, которые одновременно являются и уплотняющими устройствами. Струйная трубка находится внутри ведомого зубчатого колеса 10 волнового редуктора с небольшим зазором между соплами и последним. Под действием силы ведомое зубчатое колесо может деформироваться и находиться в зацеплении с неподвижным зубчатым колесом 11.Ведомое зубчатое колесо имеет число зубьев 2 , а неподвижное колесо число зубьев 2+1, а в совокупности они составляют волновой зубчатый редуктор. Ведомое зубчатое колесо жестко соединено с винтом 15, находящимся в зацеплении с гайкой , которая помещена в поршне со штоком 16. Винт 15 имеет возможност входить в шток. Винт и поршень со штоком, содержащим гайку, в совокупности составляют кинематическую пару винт-гайка , которая преобразовывает вращательное движение винта в возвратно-поступательное движедние поршня со штоком. Поршень через шток шарнирно связан с рычагом механической обратной связи следящего линейного гидропривода. В корпусе 1 гидропривода помещен дроссельный гидрораспределитель 6, к которому подводятся две гидролинии - Напорная Рн и сливная Рс. От ДГР отходят две гидролинии 7 и 8 , которые соединяют соответственно правую 12 и левую 13 полости гидропривода. В корпусе 1 гидропривода помещен поршень со штоками 5, расположенными по обе стороны поршня. Корпус 1 и поршень со штоками 5 образуют силовой гидроцилиндр с двухсторонним штоком. ДГР шарнирно связан с рычагом механической обратной связи,,который в свою очередь также шарнирно связан со штоком поршня 5. ДГР, гидроцилиндр и рычажная механическая обратная связь в совокупности составляют следящий линейный гидропривод. Электронный бло управления формирующий сигналы на ШЭД, состоит из цифровой управляющей машины 4 и электронного коммутатора 3 .
Цифровой электрогидравлический привод работает следующим образом.
Управляющие импульсы с ЦУМ 4 поступают на электронный коммутатор 3, который формирует алгоритм управления на ШЭД 2. При получении команды с электронного коммутатора ШЭД поворачивается на определенный угол по часовой или против часовой стрелки согласно команде, при этом он поворачивает через муфту струйную трубку с двумя соплами, к которой подводится жидкость от напорной гидролинии. Жидкость, вытекая из сопел струйной трубки, действует на ведомое эубчатое колесо, которое под действием сил от струй деформируется и, находясь в зацеплении с неподвижным зубчатым колесом, перемещается на определенный угол. Жидкость, вытекая из сопел и воздействуя на ведомое зубчатое колесо, затем отводится из полости волнового редуктора в сливную гидролинию. Струйная трубка с соплами является генератором волн. Ведомое зубчатое колесо с поворотом струйной трубки также проворачивается на определенный угол с учетом коэффициента передачи,волнового зубчатого редуктора . Ведомое зубчатое колесо проворачивает винт 15, установленный в подшипнике качения, через жесткое закрепление. Поворот винта вызывает поступательное перемещение поршня со штоком 16. Перемещение поршня через шток вызывает перемещение рычага 14 механической обратной связи следящего линейного гидропри.вода. Рычаг обратной связи перемещается относительно закрепления его в штоке детали 5. При перемещении рычага относительно точки закрепления в штоке детали 5 произойдет смещение дроссельного гидрюраспределителя б относительно его нейтральног положения, что вызовет соединение полостей 12 и 13 с напорной и сливн гидролиниями через внутренние гидролинии 7 и 8. Соединение полостей 12 и 13 с напорной и сливной гидролинией соответственно будет зависет от перемещения рычага обратной связи по часовой или против часовой стрелки, что вызовет перепад давления на поршне 16 и перемещение последнего. Перемещение поршня 5 вызовет перемещение точки закрепления рычага обратной связи на штоке детали 5 уже относительно его закрепления с деталью 16 и, в свою очеред приведет к возврату ДГР в нейтральное положение. Возврат ДГР в нейтральное положение приведет к перекрытию гидролиний 7 и 8, соединяющих правую и левую полости гидропривода, и к остановке поршня 5, Следовательно, поворот вала ШЭД на определенный угол вызовет строгое определенное перемещение штока следящего гидропривода .
Технико-экономическая эффективность предлагаемого привода состоит в увеличении Добротности, так как вал ШЭД не нагружен никаки0ми силами. При компановке дискретного электрогидравлического линейного привода, состоящего из ШЭД,ДГР, представляющего 4-х кромочный золотник, гидроцилиндра, в совокупнос5ти представляющие следящий линейный гидропривод с рычажной механической обратной связью отсутствуют люфтовые соединеЕШя в виде винтгайка, рейка-шестерня и т.д. в
0 цепи обратной связи и не приходится решать вопроса в выборе требуемого усилия на ДГР за счет скорости перемещения последнего.
Формула изобретения
Цифровой электрогидравлический привод, содержащий шаговый электродвигатель , соединенный с каналом управления и гидромеханическим усилителем мощности, выполненным, например, в виде волнового редуктора со струйной трубкой, дроссельный гидрораспределитель золотникового типа, связанный через передачу винтгайка с гидромеханическим усилителем мощности и гидравлически - с линейным гидродвигателем, шток которого связан с рычагом обратной связи, отличающийся тем, что, с целью улучшения динамических характеристик привода, в нем рычаг обратной связи связан с винтом передачи винт-гайка.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке 2152475/18-24,
кл. F 15 В 1J/12, 1965.
2. Дискретное управление электрогидравлическим приводом под ред.
Г. Н. Посохина, М, Энергия, 1975, с.21 (прототип).
А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электрогидравлический привод | 1978 |
|
SU746132A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2212576C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| Устройство для управления исполнительным органом выемочной машины | 1980 |
|
SU899919A1 |