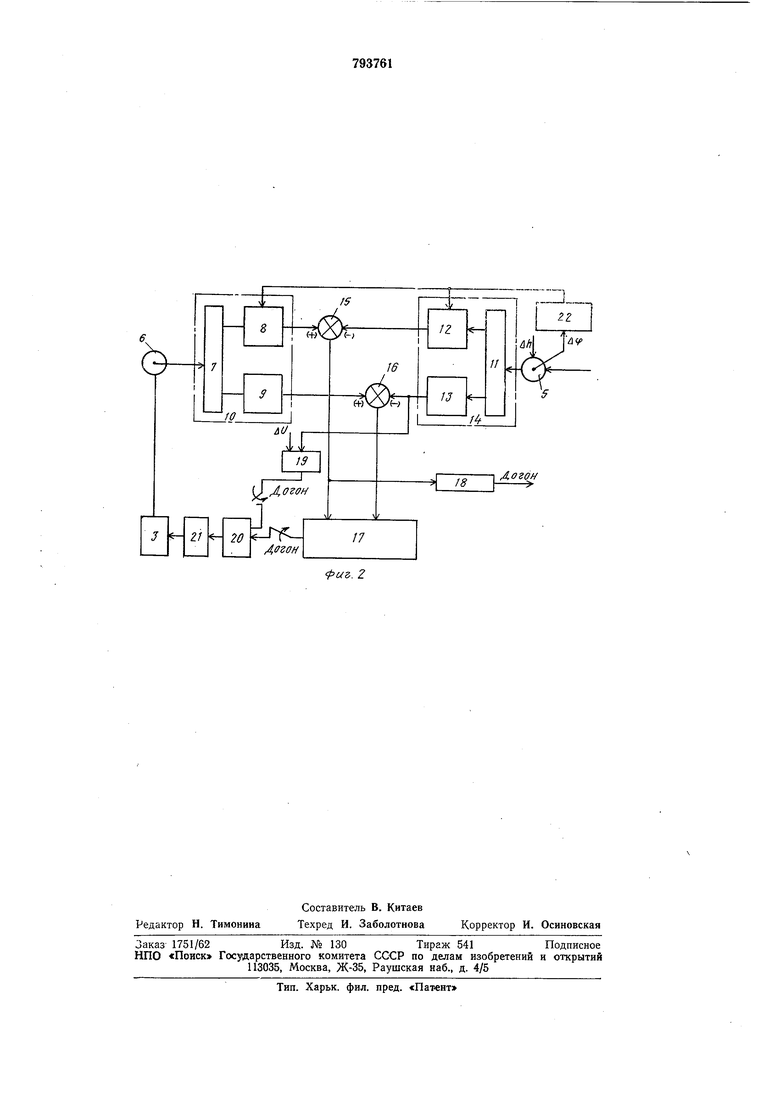
Измерительное колесо 6 надето на входной вал редуктора 7, выходные валы которого соединены соответственно с датчиком
8положения бревна на тележке и датчиком
9скорости тележки 3.
Редуктор 7 и датчики 5 л 9 конструктивно объединены в блок 10 датчиков тележки.
Измерительное колесо 5 надето на входной вал редуктора 11, выходные валы которого соединены соответственно с датчи.ком 12 положения и датчиком 13 скоросхи подачи бревна в раме. Редуктор // и датчики 2 и 13 конструктивно объединены в блок 14 датчиков рамы. Датчики 8 и 12 конструктивно выполнены в виде потенциометров, а датчики 9 н 13 в вйде тахогенераторов. Выходы датчиков 8, 9, 12, 13 через соответствующие сумматоры /5 и 1,6 соеди.нены с вычислительным блоком 17. Выход сумматора 15 имеет масштаб межторцового .расстояния бревен и соединен с пороговым элементом 18, уровень сра;батывания которого устанавливается из условия долустилюсхи удара бревен при догоне из-за ашибок системы управления. Выход датчика J3 соединен с Зсилйтелем 19 мощности, который имеет достаточную мощность управления двигателем тележки в режи-ме слежения. Иороговый элемент /8 имеет контакты в цепях между усш1ителем 19 и вычислительным блоком 17с одной стороны и электродвигателем 20 тележки с другой сторояы. Электродвигатель 20 соединен с входным валом редуктора 21 тележки 3.
На оси рычажной системы колеса 5 установлен датчик 22 наличия бревна в .раме, который соединен с датчиками 8 и .12.
Предлагаемое устройство работает следующим образом.
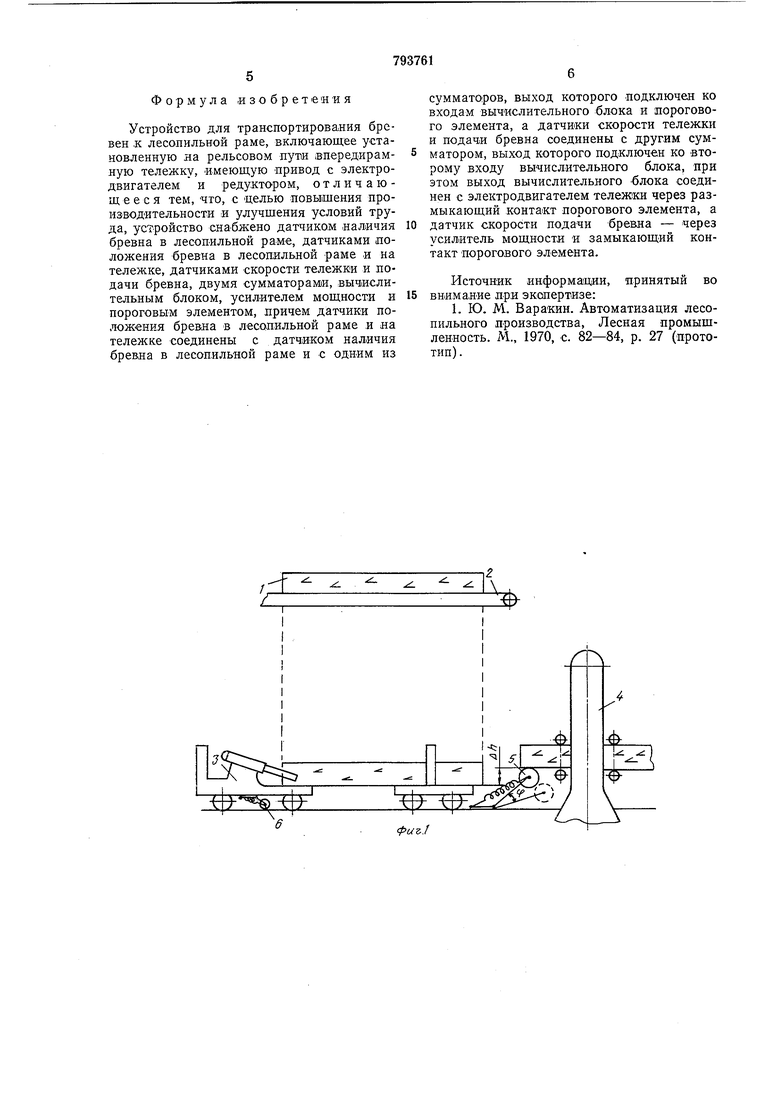
После сброса .бревна 1 (фиг. 1), поданного транспортером 2 на тележку 3, оператор ориентирует бревно и включает устройство подачи тележки. Тележка 3 с бревном разгоняется с максимальным ускорением. С помощью колес 5 я 6 измеряются положе1-тя и скорость тележки относительно бревна в раме 4. По сигналу вычислительного блока начинается торможение тележ,ки. При максимальной скорости подачи бревна , в раму передний торец подаваемого бревна входит в раму к моменту окончания пиления бревна. При подаче -бревна к раме отжимается .и.змерителькое колесо 5. Поворот его происходит вследствие .наличия перепада Ah на угол Дф, достаточный для срабатывания датчика 22 наличия бревна в раме.
Процесс пиления вновь поданного бревна происходит до длины оставшейся части .1,5-2,0 м. В этот момент по команде оператора происходит разжим клещей, торможение освободившейся тележки и возвращение ее в исходное положение. холостого хода про.исходит также с максимальными ускорениями по сигналам с вычислительного устройства.
Процесс регулирования в системе происходит следующим образом.
При движении тележки 3 измерительное колесо 6 через редуктор 7 вращает датчики 8 и Я которые выдают сигналы, пропорциояальные пути, пройденному тележкой от исходного состояния, и ее скорости. На сумматорах 15 ,и 16 вычитаются из них соответствующие сигналы с датчиков 12 и 13 Последние приводятся во вращение через редуктор 11 И измерительное колесо 5. Измерительное колесо прижато пружиной к бревну в раме и фиксирует путь бревна в раме и его скорость. При подходе нового бревна из-за Aft измерительное колесо отжимается на угол Лф. Срабатывает датчик 22 и возвращает датчики в виде потендиометров 8 и /2 в исходное положение.
При сокращении межторцового зазора до малой величины срабатывает пороговый элемент 18, который отключает от электродвигателя 20 тележки вычислительный блок 17 и подключает усил.итель 19 мощности.
Вычислительное устройство .работает по сигналам относительного положения бревен и относительной скорости по заданному оптимальному алгоритму.
Алгоритм соответствует объекту управления второго порядка без демпфирования, без трения и без позиционной составляющей.
Таким образом, информация па оптимальную систему подается после сложения сигналов с датчБков положения -бревна на тележке и бревна в рам-е и сигналов с соответствующих тахогенераторов. Разгон и торможение тележки осуществляют с максимальным усилием. Возвращение измерительных систем в исходное положение осуществляется по сигналу, вырабатываемому контактным устройством на измерительном колесе. За счет этого достигается простота блоков измерительных датчиков. Отсутствие автоколебательного режима достигается за счет введения порогового элемента, срабатывающего при подходе но.вого бревна на малое межторцовое расстояние. В предлагаемой .системе .предусмотрен (по этому же сигналу) переход .на режим слежения тележки.
Данное устройство позволит применить для пиления без межторцовых зазоров двигатель тележки прежней мощности, хотя средняя скорость тедежки .значительно увеличивается. Быстрый возврат тележки с новым бревном улучшит также подачу в раму предыдущего .бревна, так как при наличии проскальзывания подающих вальцов рамы автоматически создаваемое впередирамной тележкой дополнительное усилие уменьшает потерю производительности пиления.
Формула изобретения
Устройство для транспортирования бревен ,к лесопильной раме, включающее установленную на рельсовом пути впередирамную тележку, имеющую привод с электродвигателем и редуктором, отличающееся тем, что, с целью повышения производительности и улучщения условий труда, устройство снабжено датчиком наличия бревна в лесопильной раме, датчиками положения бревна в лесопильной раме и на тележке, датчиками скорости тележки и лодачи бревна, двумя сумматорам)и, вычислительным блоком, усилителем мощности и пороговым элементом, причем датчики положения бревна в лесопильной раме и на тележке соединены с датчиком наличия бревна в лесопильной раме и с одним из
сумматоров, выход которого подключен ко входам вычислительного блока и порогового элемента, а датчики скорости тележки и подачи бревна соединены с другим сумматором, выход которого подключен ко второму входу вычислительного блока, при этом выход вычислительного блока соединен с электродвигателем тележки через размыкающий контакт порогового элемента, а датчик скорости подачи бревна - через усилитель мощности и замыкающий контакт порогового элемента.
Источник информации, принятый во внимание при экспертизе:
1. Ю. М. Варакин. Автоматизация лесопильного производства. Лесная промышленность. М., 1970, с. 82-84, р. 27 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для распиловки бревен | 1983 |
|
SU1136939A1 |
| ВПЕРЕДИРАМНЫЙ СТАЦИОНАРНЫЙ АНПАРАТ ДЛЯ ПОДАЧИ БРЕВЕН В ЛЕСОПИЛЬНУЮ РАМУ | 1972 |
|
SU333042A1 |
| Способ впередирамного обслуживания подаваемых в лесопилку бревен | 1937 |
|
SU61454A1 |
| Устройство для подачи бревен в лесопильную раму | 1987 |
|
SU1521592A1 |
| Линия для распиловки бревен | 1987 |
|
SU1468751A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ БРЕВЕН | 1970 |
|
SU281796A1 |
| Подающая тележка лесопильной рамы | 1990 |
|
SU1763178A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2010 |
|
RU2454317C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1993 |
|
RU2084331C1 |
| Устройство для определения фактической посылки лесопильной рамы | 1985 |
|
SU1303407A1 |
Г
puz.f
Фи5. Z
uh
Лг
V
