(54) ГИДРОСТАТИЧЕСКИЙ УРОВНЕМЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидростатический датчик уровня жидкости | 1978 |
|
SU779812A1 |
| Уровнемер жидкости | 1978 |
|
SU720312A1 |
| Гидростатический датчик уровня жидкости | 1972 |
|
SU447569A1 |
| Гидростатический уровнемер | 1978 |
|
SU746194A1 |
| Гидростатический датчик уровня жидкости | 1974 |
|
SU482630A1 |
| Гидростатический уровнемер | 1979 |
|
SU800661A1 |
| Устройство для измерения гидростатического давления жидкостей в резервуарах | 1988 |
|
SU1578541A1 |
| Преобразователь уровня | 1983 |
|
SU1129497A1 |
| Устройство для измерения гидростатического давления жидких нефтепродуктов в резервуарах | 1988 |
|
SU1516811A1 |
| ГИДРОСТАТИЧЕСКИЙ УРОВНЕМЕР | 1998 |
|
RU2138026C1 |
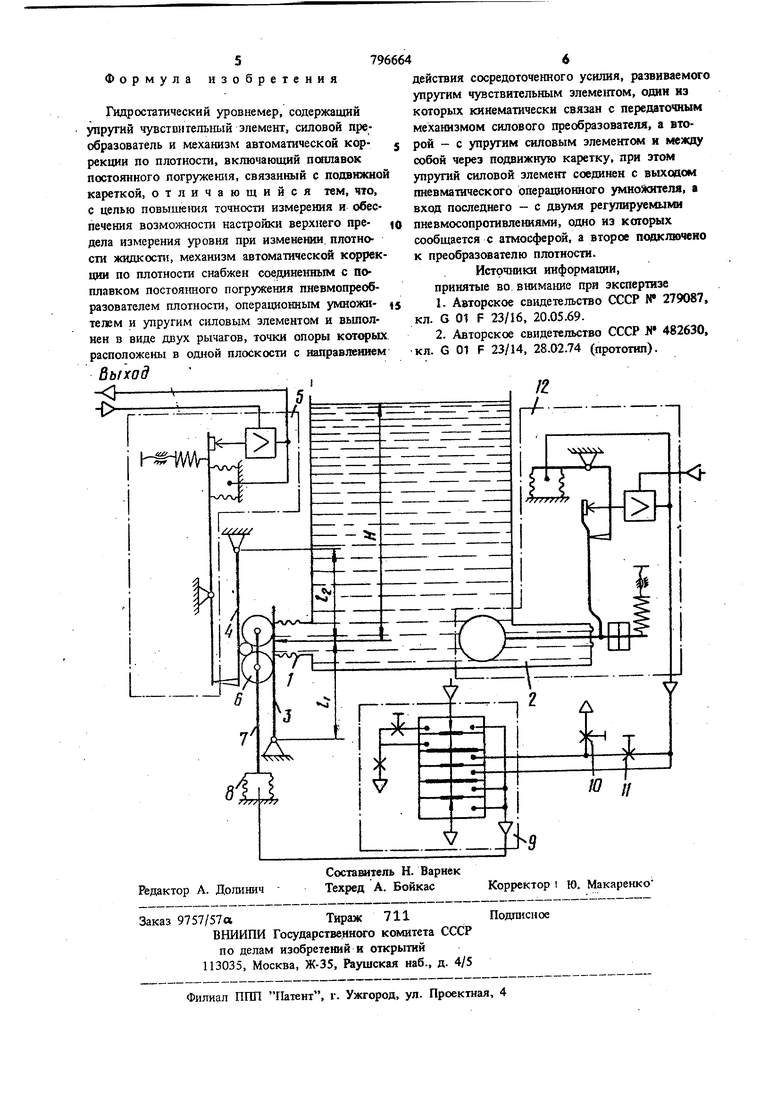
Изобретение относится к приборостроению и может применяться для измерения уровня жидкостей с непостоянной плотностью. .. В известном сигнализаторе уровня жидкости с целью устранения влияния плотности на линии выхода воздуха нз сопла пнёвм|опреобразователя установлен регулируемый дроссель, кинематически связанный через передаточный механизм с силовым элементом-сильфоном, полость которого с помощью импульсной линии соединена с выходом пневматического преобразователя плотности 11. Недостаток этого устройства закгоочается в том, что схемное решение его обуславливает наличие погрешности автоматического регулирования. Величина этих погрешностей зависит не только от точности изготовле1шя рабочих поверхностей регулируемого дросселя, но и связана с тем, что расходные характеристеки дросселя нелинейны, а устройства или элемент, учитьгоающего эту нелинейность, в схеме не содержатся. Наиболее близким по технической сущности к йредла аемому является гидростатический датчик уровня жидкости, который содержит упругий чувствительный элеме1гг в виде сильфона, связанный через передаточный механизм, выполненный в виде двуплечего рычага, с указателем уровня. Для коррекции по плотности устройство дсиопнительно снабжено преобразователем плотности, выполненным в виде поплавка постоянного погружения, связанного посредством двух блоков и нити с механизмом изменения соотношения длин плеч рычага, выполненным в виде подпружиненной подвижной каретки 2. Недостатком этого устройства является то, что в нем не предусмотрена перестройка верхнего предела измерения, так как зто связано с тем, что при различных значениях верхнего предела измеряемого уровня жидкости и при одинаковом диапазоне изменения ее плотности требуется различный ход каретки, что, в свою очередь, связано не только с заменой чувствительного элемента или соотношения длии плеч рычага передаточного механизма, но и с изменением объема постоя1шо погруженного пснтлавка. 3 Кроме того, cxeMiaiM решением не предусмотрено устранение погрешности V измерения из-за нелинейности характеристики механизма автоматической коррекции по плотности, связанной с наличием веса толкателя и рычага, а также изменения длины плеча последнего. Цель изобрете1шя - повыше1ше точности измерения и обеспечение возможности гистройхи верхнего предела измерения уровня при изменении плотности жидкости. Поставленная цель достигается тем, что мехаш1зм автоматической коррекщти по плотности снабжен соединенным с поплавком постоятюго погружеш1я пневмопре образ ователем плотности, операционным умножителем и упругам силовым элементом я выполнен в виде двух рычагов, точки опоры которых расположены в одной плоскости с направлением действия сосредоточенного усилия, развиваемого упругим чувствительным элементом, один из которых кинематически связан с передаточным механизмом силового преобразователя, а второй е упругим силовым элементом и между собой через подвижную каретку, при этом упругай силовой злемент соединен с выходом пневматического операционного умножителя, а вход последнего.- с двумя регулируемыми пневмосопротивлениями, одно из которых сообщается с атмосферой, а второе подключено к преобразователю плотности. На Чертеже схематически изображен гидрост тический уровнемер. Уроэнемер состоит из упругого чувствительного злемента 1, воспри1шмающего гидростатическое давле1П1е столба жидкости в резервуаре 2, рычага 3, кинематически связанного с упругим чувствительным элементом 1, и рычага 4 с передаточным механизмом силового преобразователя 5, Точки . onoptji этих рычагов расположены в одной плоскости с линией дейст вия сосредоточенного усилия, развиваемого упру гим чувствителы{ым элементом, на противоположных сторонах относительно ее. Между рычагами установлена подвижная каретка 6, которая посредством тяги 7 связана с упругам силовым элементом 8, выполненным в виде сильфона. Полость этого сильфона соединена с выходом пневматического операционного умнояштеля 9, постоянный коэффициент которого больше единицы. Вход его подключен к регулируемому пневмосопротивлению 10, второй конец которог сообщается с атмосферой, и - к регулируемому пневмосопротивлению 11, второй конец которого подключен к выходу преобразователя плотности 12. Выходной сигнал преобразователя плотности стандартный П1 евматический. Работает устройство следующим образом. Гидростатическое давление столба жидкости в резервуаре 2 воздействует на упругий чувствитель4ный злемент 1 и преобразуется в сосредоточенное усилие Р, велишна которого пропорциональна высоте столба и плотности жидкости в резервуаре 2. Сосредоточенное усилие, развиваемое ynpyniM чувствительным злементом 1, через рычаг 3, подвижную каретку 6 и рычаг 4 воздействует 1И передаточный механизм ошового преобразователя 5. На выходе силового преобразователя образуется сигнал, величина которого пропорциональна сосредоточенному усилию, воздействующему на его передаточный механизм со стороны рычага 4. При изменении плотности жидкости в резервуаре 2, например, увеличении и неизменном уровне ее в нем, сосредоточенное усилие, развиваемое упругим чувствительным злементом, увеличится. Так как высота столба жидкости в резервуаре 2 остается неизме1шой, то и усилие Р, воздействующее на передаточный механизмсилового преобразователя 5, должно остаться неизменным. Это обеспечивается соответ тзующим перемеще1шем подвижной каретки 6 вдоль рычагов 3 и 4. Величина и направление перемеще}шя подвижной каретки 6 зависит от изменения велимны избыточного давления воздуха в упругом силовом элементе 8, которое, в свою очередь, зависит от плотности жидкости в резервуаре 2. При изменении плотности жидкости в резервуаре 2, например при увеличении на выходе преобразователя плотности 12, на входе операционного умножителя 9 и в полости силового злемента избыточное давление воздуха также возрастет. Это прнведет к увеличению на необходимуш величину длины плеча Е рычага 3 и уменьше1шю на такую же величину длины плеча Р рычага 4, в результате чего усилие, воздействующее на передаточный механизм силового преобразователя 5, уменьшается на величину, пропорциональную приращению плотности 5КИДКОСТИ в резервуаре 2 при неизменном ее уровне. При максимальном значе1ШИ плотности ход силового злемента 8 имеет максимальное значе1ше. При каждом промежуточном значения плотности ход упругого силового элемента 8 прямо пропорщюнально зависит от величины избыто И1ого давления воздуха, поступающего его полость. Величина ми1шмального и максимальнсм-о начений избыточного давления воздуха в поости упругого силового злемента 8 устанавивается при настройке операщюнного умножиеля с помощью соответствующей регулировки остоянного коэффициента, величина которого ольше единицы. Эта величина зависит от падеия давления на пневмосопротивлении 10, а акже от верхнего предела измерения преобазователя плотности 12.
