1
Изобретение относится к электротехнике и может быть использовано для регулирования электропривода с применением вентильного преобразователя.
Известно устройство для управления электродвигателем постоянного тока, в котором параметры регулятора скорост-и меняются в функции токового режима якорной цепи двигателя l . S
Наиболее близким по технической сущности к изобретению является устройство для управления электродвигателем постоянного тока, содержащее последовательно соединенные блок задания тока, блок линеаризации,сумматор и вентильный преобразователь, выход которого подключен к якорной цепи двигателя, датчики тока якоря и напряжения 2 .
Недостатком указанных устройств является то, что они не обеспечиваю предельного быстродействия, так как динамические свойства-привода зависят жестко от постоянной времени якорной цепи Tfl.
Цель изобретения - повышение быстродейтсвия регулирования вентилного электропривода постоянного тока по возмущению (за счет компенсации инерции якорной цепи двигателя). Поставленная цель достигается
там, что устройство снабжено общей шиной управляющих импульсов вентильного преобразователя и интегратором со сбросом, входы которого соединены с выходами датчиков тока якорл
и напряжения, выход .подключен к сумматору, а управляющая цепь ключа сброса интегратора подсоединена к общей шине управляквдих импульсов.
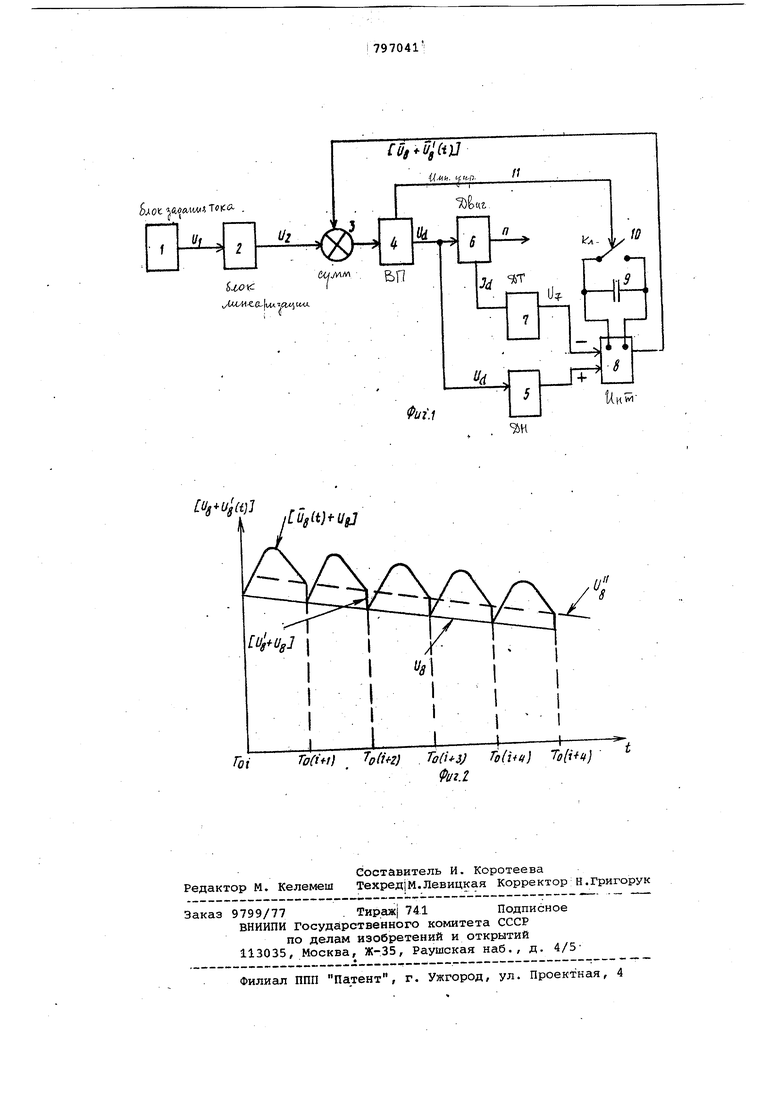
На фиг.1 показана структурная
схема предлагаемого устройства; на фиг.2 - эпюры напряжений, поясняю-, щие его работу.
Устройство содержит, блок 1 задания тока, выход которого подключен на
вход блока 2 линеаризации токового канала, выход которого подключен к сумматору 3 вентильного преобразователя 4, выход которого подключен к датчику 5 напряжения и к двигателю
б постоянного тока. К якорной цепи двигателя 6 подключен датчик 7 тока. Выходь датчиков 5 и 7 подключены ко входу интегратора 8, выход которого подключен к сумматору 3, причем параллельно интегрирующему конденсатору 9 подключен ключ разряда интегратора 10, цепь управления которого в свою очередь подключена к сборке управляющих импульсов системы 11 фазового управления преобразователя
Устройство работает следующим образом.
Сигнал задания тока U-) с выхода узла 1 задания тока поступает на блок 2 линеаризации токового кйнала задания. Сигнал линеаризованного тока и о., с выхода блока 2 совместно с компенсационным сигналом (Ug + + Ug Jt) с выходаинтегратора 8 поступают на сумматор 3 вентильного преобразователя 4.
Сигналы, пропорциональные теку- щим значениям якорного тока U7 3jj R и напряжению вентильного преобразователя Uj с выхода датчиков 7 и 5, соответственно, поступают на вход интегратора 8 с противоположной полярностью, т.е. интегрируется разность сигналов, полученных, согласно (1) и (2)
Us- Ur U -t- и (t),
(1)
где Ug - сигнал,пропорциональный текущему значению ЭДС двигателя;
UftCt) - , пропорциональный текущему значению падения напряжения на индуктивности якорной цепи двигателя. Период следования управляющих импульсов системы фазового управления с общей Л1ины 11 в приближении принимаем постоянным Г
т- -т (2V VuJcm 0.
где Шс - циклическая частота сети m - фазность преобразователя. По теореме о среднем конечное значение сигнала с выхода интегратора 8 на каждом интервале проводимости вентилей с учетом (1)
.
W(-J (US-UT -W (.)| где Tfg 5 Е jj т управляющий сигнал,
пропорциональный сред нему значению ЭДС двигателя за очередной интервал проводимости; Uj - управляющий сигнал,
8 пропорциональный среднему значению падения напряжения на индуктивности якорной цепи за очередной интервал проводимости.
Таким образом в течение интервала проводимости на сумматор 3 вентильного преобразователя с текущим значением линеаризованного задания тока якоря U2 поступает сигнал с интегратора Ug (t), причем .в момент формирования очередногоуправляющего импульса в первом приближении этот сигнал по
3) равен сумме сигналов ( Ug+ и 8)Известно, что как для прерывистого токового режима, так. и для устано.вившегося непрерывного токового режима якорной цепи Uj О, поэтому компенсация инерции якорно.й цепи двигателя (Tj ) за счет управляющего сигнала U8 будет осуществляться лишь при изменении среднего значения Q якорного тока 5 между ближайшими интервалами проводимости (см.фиг.2).
&за
44)
в :т„
где u5jj - приращение среднего значения якорного тока за последний интервал проводимости .
На Фиг.2 показано изменение сигнла и8 (t) на выходе интегратора 8, а также сумма сигналов ( Ug+ Ug ) в моменты TO ( i + к) формирования управляющих импульсов (где ,2, 3...). в связи с этим пунктиром показан как бы эквивалентный управляющий сигнал ug , поступающий с выхода интегратора длякомпенсации отрицательной обратной связи по ЭДС двигателя и падения напряжения на индутивной якорной цепи.
Таким образом, предлагаемое устгг ройство особенно эффективно при ли квидации возмущающих воздействий со стороны нагрузки, так как оно в текущем же интервале проводимости учитывает изменение среднего значения тока якоря и корректирует значение угла фазового сдвига очередного управляющего импульса для повышения напряжения вентильного преобразователя и ликвидации просадки скорости.
Формула изобретения У стройство для управления электродвигателем постоянного тока, содержащее последовательно соединенные блок задания тока, блок линеаризации, сумматор и вентильный преобразователь, выход которого подключен к якорной цепи двигателя, дачтики токаякоря и напряжения, отличающееся тем, что, с целью повышения быстродействия оно снабжено общей шиной управляющих импульсов вентильного преобразователя и интегратором со сбросом, входы которого Соединены с выходами датчиков тока якоря и напряжения, выход подключен к сумматору,а управляющая цепь ключа сброса интегратора подсоединена к общей шине управляющих импульсов.
Источники информации, принятые во внимание при экспертизе.
1.Авторское свидетельство СССР № 157396, кл. Н 02 Р 5/06, 1962..
2.Патент США 3649895, кл. 318-331, 1972.
, . ЙН
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод постоянногоТОКА | 1976 |
|
SU817950A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU995244A2 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| Устройство для управления электродвигателем постоянного тока | 1977 |
|
SU928579A1 |
| Способ импульсно-фазового управления вентильным преобразователем | 1977 |
|
SU769698A2 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| Устройство для управления вентильным преобразователем | 1979 |
|
SU786817A1 |
| Вентильный электропривод постоянного тока | 1985 |
|
SU1372567A1 |
| Устройство для управления электродвигателем постоянного тока | 1985 |
|
SU1267577A2 |
| Способ регулирования вентильного электропривода постоянного тока | 1976 |
|
SU657556A1 |
(i:ug(t)i-ugj
rot
To(Ut}
и:
ofuz) . ТоСиз) foliiti Фиг.г
