СО
N5 СЛ
о: 

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения среднего значения напряжения двухфазного вентильного преобразователя | 1981 |
|
SU1157630A1 |
| Устройство для моделирования цепи нагрузки вентильного преобразователя | 1978 |
|
SU750519A1 |
| Устройство для управления вентильным преобразователем | 1979 |
|
SU786817A1 |
| Способ раздельного управления реверсивным вентильным электроприводом и устройство для его осуществления | 1984 |
|
SU1354377A1 |
| Способ управления вентильным преобразователем | 1984 |
|
SU1264278A1 |
| Устройство для управления электродвигателем постоянного тока | 1985 |
|
SU1267577A2 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| Вентильный электропривод постоянного тока | 1976 |
|
SU657561A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| Способ управления тиристорным электроприводом | 1982 |
|
SU1078565A2 |

Изобретение относится к электротехнике и может найти применение в электроприводах металлорежущих станков. Целью изобретения является повышение точности. Устройство содержит источник входного сигнала 9, выход которого через фиксатор нулевого порядка 16 и первый сумматор 10 подключен к второму входу нуль-органа 2. Выход источника входного сигнала 9 подключен также к цепи из последовательно включенных первого нелинейного элемента 13, второго сумматора 11, второго нелинейного элемента 14, третьего сумматора 12, ключа прерывистого режима 7. В устройстве обеспечивается высокая точность линеаризации статической характеристики вентильного преобразователя. 4 ил. с S (Л
U
фи. I
Изобретение относится к электротехнике и может найти применение в электроприводах различных механизмов, в частности металлорежущих станков.
Цель изобретения - повышение точности.
На фиг. 1 представлена схема электропривода; на фиг. 2 и 3 - характеристики нелинейных элементов; на фиг. 4 - графики, поясняющие математические выводы.
Вентильный электропривод постоян- ного тока содержит электродвигатель 1 последовательно включенные нуль-ор- ган 2, формирователь 3 импульсов, распределитель 4 импульсов и вентильный преобразователь 5, к выходу которого подключен электродвигатель 1, источник 6 опорного напряжения, под- ключенный к первому входу нуль-органа 2, ключ 7 прерывистого режима, управляющий вход которого соединен с датчиком 8 токового режима вентильного преобразователя 5.
Устройство содержит также источник 9 входного сигнала, сумматоры 10 12, первый 13 и второй 14 нелинейные рлементы с характеристиками, представленными соответственно на фиг.2 и 3,, датчик 15 ЭДС электродвигателя и фиксатор 16 нулевого порядка.
Источник 9 входного сигнала через последовательно влкюченные фиксатор 16 нулевого порядка и первый сумматор 10 подключен к втором входу нуль- органа 2 и к цепи из последовательно включенных первого нелинейного элемента 13, второго сумматора 11, второго нелинейного элемента 14, треть- его сумматора 12, ключа 7 прерывистого режима. Вторые входы первого 10 и второго 11 сумматоров подключены к датчику 15 ЭДС электродвигателя 1, второй вход третьего сумматора 12 - к выходу фиксатора 16 нулевого порядка, а третий вход первого сумматора 10 соединен с выходом ключа 7 прерывистого режима. Управляющий вход фиксатора 16 нулевого порядка соеди- нен с выходом формирователя 3 импульсов .
Электропривод работает следующим образом.
Сигнал задания U,(0) (где 0 cOpt - текущее время в относительных единицах; w,- частота питающей сети t - текущее время, с) поступает на вход фиксатора 16 нулевого порядка.
В сигнале задания Uj, (е) наряду с несущей информацию составляющей присутствует сигнал стационарной по- мехи, имеющей частоту, равную частоте коммутации в вентильном преобразователе 5, и являющейся следствием пульсирующего характера выходного тока и напряжения последнего.
Замыкание ключа фиксатора 16 произ-- водится в моменты выдачи импульсов управления на вентили.В эти моменты значение сигнала U (е) запоминается фиксатором нулевого порядка и используется в прочие моменты времени в качестве задающего сигнала, что позволяет исключить влияние присутствующей в составе сигнала задания помехи на выходные параметры электропривода.
Сигнал и(9) с выхода фиксатора 16 поступает в яервый сумматор 10, где суммируется с сигналом (0) единичной положительной обратной связи по ЭДС электродвигателя. Результирующий сигнал и ,,пр (в) с выхода сумматора 10 подается на вход нуль-органа 2. Величина сигнала с выхода фиксатора 16 однозначно определяет в данном случае ток в цепи электродвигателя.
Помимо сигнала управления V у,р (в), на вход нуль-органа 2 от источника опорного напряжения 6 поступает опорное косинусоидальное напряжение. В момент равенства сигналов выходной сигнал нуль-органа 2 меняет знак и формирователь 3 импульсов генерирует импульсы, подаваемые через распределитель 4 импульсов на вводимые в работу вентили. С помощью указанных импульсов, кроме того, осуществляется управление работой ключа фиксатора 16.
В якорной цепи электродвигателя 1 протекает ток io)(0), под действием которого электродвигатель приходит во вращение. Выходной сигнал Uj(0) датчика 8 токового режима принимает следующие значения:
1 на интервале бестоковой паузы в цепи нагрузки,
и„(е)
о при наличии тока в цепи i нагрузки. Сигнал Uj(6) управляет ключом 7 прерывистого режима, коммутирующим цепь корректирующего сигнала U|,p(0); замыкание ключа происходит при Uj(e)1 (т.е. на интервале бестоковой паузы).
В режиме непрерывного тока ключ 7 непрерывного режима постоянно разомкнут и корректирующий сигнал не поступает на вход первого сумматора 10. В режиме прерывистого тока на интервале проводимости ключ 7 прерывистого режима также разомкнут и корректирующий сигнал не поступает на вход первого сумматора 10. На интервале бестоковой паузы ключ 7 прерывистого режима замыкается, подключая корректирующий сигнал к входу первого сумматора 10.
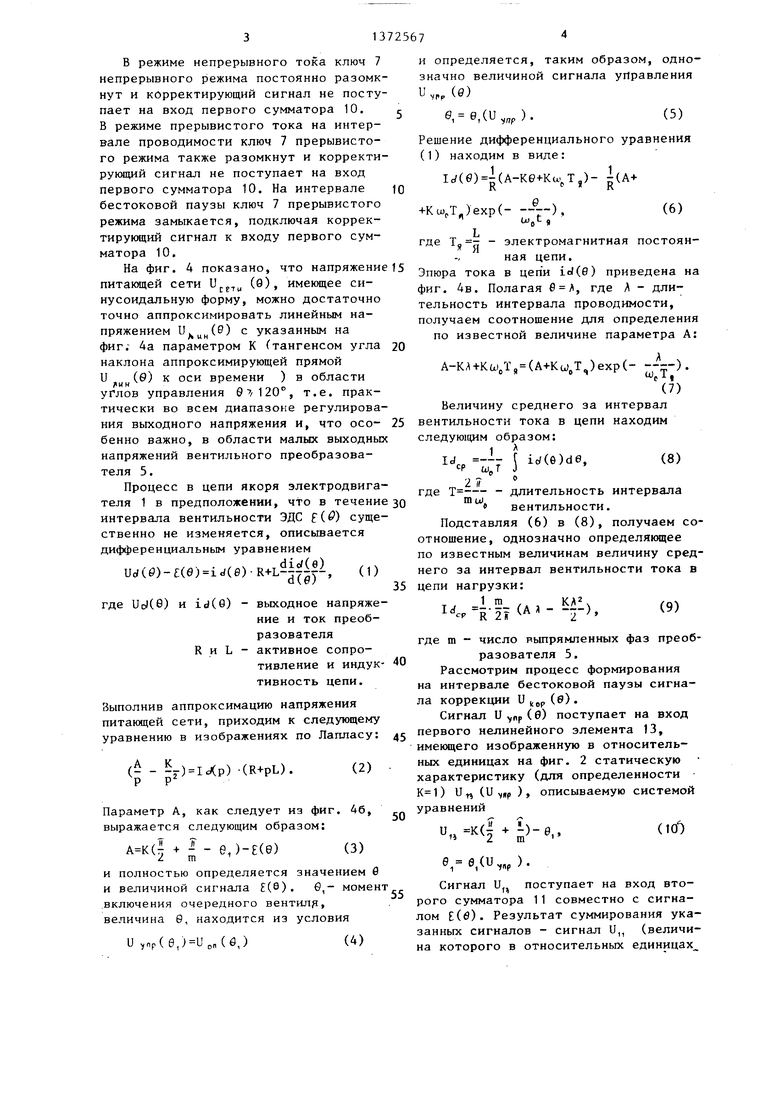
На фиг. 4 показано, что напряжение питающей сети U. (0), имеющее синусоидальную форму, можно достаточно точно аппроксимировать линейным напряжением и(0) с указанным на фиг; Да параметром К (тангенсом угла наклона аппроксимирующей прямой и (0) к оси времени ) в области углов управления 0 Л 120°, т.е. практически во всем диапазоне регулирования выходного напряжения и, что осо- бенно важно, в области малых выходных напряжений вентильного преобразователя 5.
Процесс в цепи якоря электродвигателя 1 в предположении, что в течение интервала вентильности ЭДС f(P) существенно не изменяется, описывается дифференциальным уравнением
dio((e)
Urf(0)-(0)Ld(e)-R+Ld(0)
(1)
где Uol(0) и id(6) - выходное напряжение и ток преобразователя
R и L - активное сопротивление и индук- тивность цепи.
Выполнив аппроксимацию напряжения питающей сети, приходим к следующему уравнению в изображениях по Лапласу:
(- - 2-)) -(R+PL).
Параметр А, как следует из фиг. 4б, выражается следующим образом:
(| + - е,)-Е(е) (3)
и полностью определяется значением 0 и величиной сигнала (6). б,- момент включения очередного вентилр, величина 0, находится из условия
и пр(е,)и„„(б,) (4)
и определяется, таким образом, однозначно величиной сигнала управления
Uvrp(0)
0, е,(и,„, ).(5)
Решение дифференциального уравнения (1) находим в виде:
1с/(0)(А-Ке+Ки;Т,)- к
е
+KwJJexp(- ---).
0 9
где Tjj - - электромагнитная постоянная цепи.
Эпюра тока в цеп и id (в) приведена на фиг. 4в. Полагая 0 , где f( - длительность интервала проводимости, получаем соотношение для определения по известной величине параметра А:
А-К 4-Кы/Г, (Ач-Ки),Т,)ехр(- --J-)
7)
Величину среднего за интервал вентильности тока в цепи находим следующим образом:
S
(8)
зо
35
2
где - длительность интервала
mui.
« вентильности.
Подставляя (6) в (8), получаем со- отнощение, однозначно определяющее по известным величинам величину среднего за интервал вентильности тока в цепи нагрузки:
-.).
(9)
40
дз
50
55
где m - число рыпрямленных фаз преобразователя 5.
Рассмотрим процесс формирования на интервале бестоковой паузы сигнала коррекции и др (0).
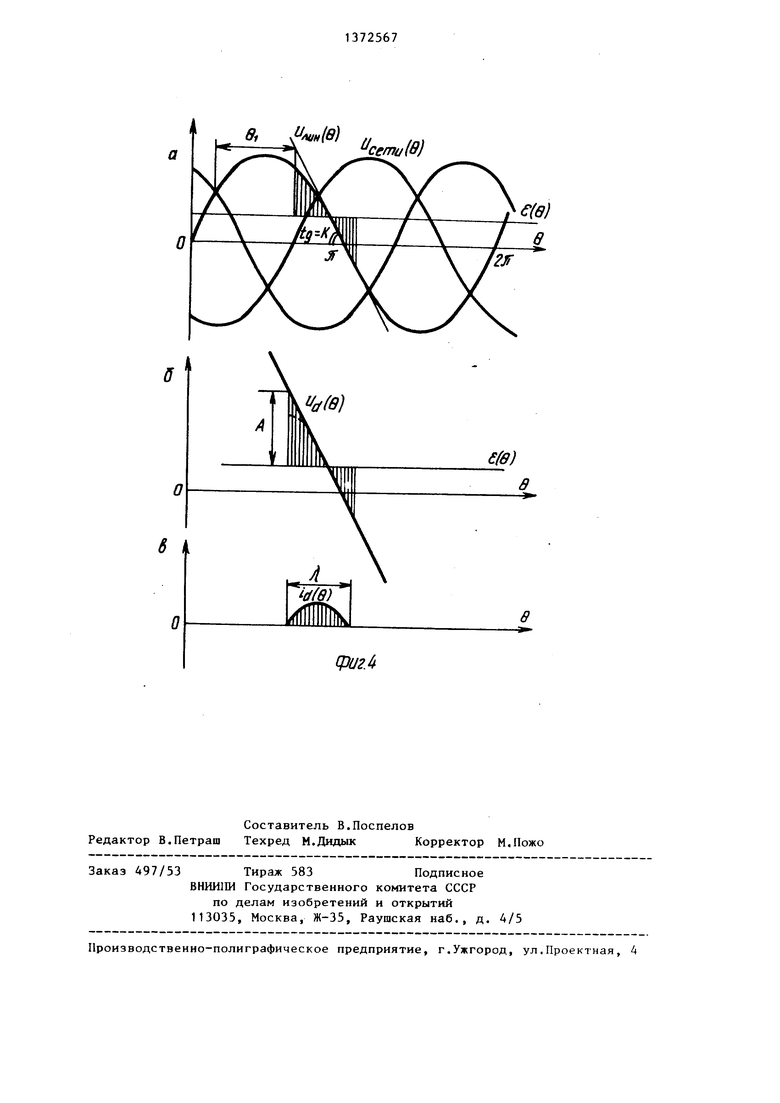
Сигнал (e) поступает на вход первого нелинейного элемента 13, имеющего изображенную в относительных единицах на фиг. 2 статическую характеристику (для определенности ) и (Uy,(, ), описываемую системой уравнений
(itf)
(| -М-0,,
m
0,и,„, ).
Сигнал и, поступает на вход второго сумматора 11 совместно с сигналом (б). Результат суммирования указанных сигналов - сигнал U,, (величина которого в относительных единицах
равна значению параметра А) поступает на вход второго нелинейного элемента 14, имеющего изображенную в относительных единицах на фиг. 3 статическую характеристику (для определенности ) и (и ,1 ), описываемую системой уравнений
и
14
c.iff(A.A-Kf),
(11)
А-КЛ+юКТ (A+Ku) Т )ехр(ЧТя
и таким образом, пред о я в 5
Сигнал и
ставляет собой вычисленную величину среднего за интервал вентильности тока в цепи для конкретного текущего значения сигнала U упр (в).
Оба нелинейных элемента являются практически безынерционными узлами устройства, поэтому вычисление среднего тока I cJ
для конкретного значения сигнала управления U „ (в) происходит практически мгновенно,
Сигнал и (е) поступает в третий сумматор 12, где вычитается из сигна- ла и (б). Полученная разность в режиме прерывистого тока в течение бестоковой паузы через ключ 7 прерывистого режима поступает на вход первого сумматора 10 в качестве сигнала коррекции U),5p(0), обеспечивая точную линеаризацию статической характеристики вентильного преобразователя 5.
Предположим, что в некоторый момент времени величина сигнала Uзолi (0) изменилась и, следовательно, на первом следующем за моментом времени 0{ интервале вентильности изменилась
и
величина сигнала Un(9). В
этом случае в контуре линеаризации, содержащем нелинейные элементы 13 и 14, ключ 7 прерывистого режима, второй 11 и третий 12 сумматоры, происходит процесс выработки нового значения сигнала коррекции Uj. (6), Длительность указанного процесса существенно меньше длительности интервала вентильности, следовательно, уже на первом следующем за моментом времени б, интервале вентильности будет выработано
0
5
0
25
30
35
40
необходимое значение сигнала коррекции и,„р(е).
Таким образом, в устройстве обеспечивается высокая точность линеаризации статической характеристики вентильного преобразователя, что приводит к повышению статической и динамической точности электропривода,
Формула изобретения
Вентильный электропривод постоянного тока, содержащий электродвигатель, последовательно включенные нуль-орган, формирователь импульсов, распределитель импульсов, вентильный преобразователь,к выходу которого подключен электродвигатель, источник опорного напряжения, подключенный к первому входу нуль-органа, ключ прерывистого режима, управляющий вход которого соединен с датчиком токового режима вентильного преобразователя, а также источник входного сигнала и сумматоры, отличающийся тем, что, с целью повышения точности, в него введены первый и второй нелинейные элементы с характеристиками, представленными соответственно на фиг, 2 и 3, датчик ЭДС электродвигателя и фиксатор нулевого порядка, при этом источник входного сигнала через последовательно включенные фиксатор нулевого порядка и первый сумматор подключен к второму входу нуль-органа и к цепи из последовательно соединенных первого нелинейного элемента, второго сумматора, второго нелинейного элемента, третьего сумматора, ключа прерывистого ре
и второго сумматора подключены к датчику ЭДС у электродвигателя, второй вход третьего сумматора - к выходу фиксатора нулевого порядка, а третий вход первого сумматора соединен с выходом ключа прерывистого режима, управляющий вход ключа фиксатора нулевого порядка соединен с выходом
формирователя импульсов.
и,
/J
0.2 0,1 0,6 0.8 Фи2.2
О
O.J
10 /
,0rc
0,2 0,3 q 0,5 0,6 сриг.З
I , , /W ,,;
(U2
| Устройство для управления вентильным преобразователем | 1981 |
|
SU987779A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления вентильным преобразователем | 1976 |
|
SU572892A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
